Изобретение относится к автоматизированному доку для мойки судов.
В частности, настоящее изобретение относится к автоматизированному доку для мойки судов, обеспечивающему возможность выполнения полноценной мойки судов непосредственно в море.
Настоящее изобретение относится также к способу мойки судов в автоматизированном доке.
Как известно, в данной области техники очистка подводной части судов, так называемого основного корпуса имеет большое значение. В действительности, поскольку судно погружено в морскую воду, на его дне начинает образовываться тонкий слой растительности. Этот слой, состоящий из бактерий, микроорганизмов, простейших одноклеточных и макроводорослей, разрастается все больше и больше, способствуя образованию небольших отложений, удаление которых становится затруднительным. Рост этих организмов приводит к существенному снижению ходовых характеристик судна и, следовательно, к большей затрате энергоресурсов, необходимых для создания силы тяги, а также к постепенному и непрерывному износу корпуса.
Известные решения этой проблемы предполагают обработку основного корпуса ядовитыми химикалиями, средствами "антиобрастания", которые в свою очередь только замедляют, но не устраняют размножение организмов и микроорганизмов, флоры и фауны, которые находятся в контакте с основным корпусом. Кроме того, указанную обработку выполняют раз в год или каждые два года, при этом она требует выполнения ряда сложных операций, таких как транспортировка, в ходе которой судно поднимают из воды; герметизация и мойка под давлением, для выполнения которых судно размещают на суше; докование, в ходе которого выполняют очистку корпуса; опускание или спуск судна в воду. Следовательно, выполнение работ в доке является долгим и кропотливым процессом и занимает одну или две недели. Кроме того, все эти операции являются сравнительно дорогостоящими, способствуют загрязнению морской среды используемыми противообрастающими красками и представляют опасность для операторов и для судна, поскольку при транспортировке, герметизации и мойке под давлением судно поднимают посредством систем, содержащих блоки и тросы, проходящие под основным корпусом.
В качестве примера можно привести Патент Германии 19734073 от 12 ноября 1998 г., выданный Исследовательскому обществу Фраунгофера, в котором описан способ, включающий направление водяной струи высокого давления на поверхность корпуса судна, поднятого из воды. Устройство для подъема корпуса из воды для выполнения очистки содержит по меньшей мере две открытые сверху U-образные профилированные опоры. Эти опоры снабжены подвижными каретками, прикрепленными к каждой из обращенных вверх U-образных опор с лебедками, каждая из которых снабжена поддерживающей стропой. Очищающую струю подают по меньшей мере из двух водоструйных сопел, которые могут перемещаться вдоль и перпендикулярно продольной оси морского судна и которые располагают на противоположных сторонах корпуса судна.
Проблема данного решения заключается в необходимости поднятия корпуса из воды.
Актуальный вариант морской установки для автоматической мойки судов, в частности для очистки основного корпуса, описан в международной заявке на патент США №2008/282956, опубликованной 20 ноября 2008 г., поданной от имени автора настоящего изобретения. В указанной заявке описана морская установка для автоматической мойки судов, содержащая частично погруженную поддерживающую конструкцию, средство для очистки судна, средство для передачи движения, управляемое по меньшей мере одним мотором, выполненным с возможностью взаимного расположения по меньшей мере части указанного средства очистки относительно судна, и командный блок для оператора, предназначенный для управления морской установкой.
Однако проблемным в рамках данного решения является эффективное использование описанной системы.
Цель данного изобретения заключается в создании автоматизированного дока для мойки судов и соответствующего способа для мойки судов в указанном доке, обеспечивающих возможность выполнения автоматической очистки судна и, в частности, основного корпуса, не поднимая судно из воды и используя установку для автоматического мойки, запатентованную тем же Заявителем.
Согласно настоящему изобретению автоматизированный док для мойки судов выполнен в соответствии с п. 1 формулы изобретения.
Согласно настоящему изобретению способ мойки судов в соответствующем автоматизированном доке осуществляют в соответствии с п. 6 формулы изобретения.
Для лучшего понимания настоящего изобретения далее приведено описание предпочтительного варианта выполнения, который не является ограничительным, со ссылкой на сопроводительные чертежи, на которых:
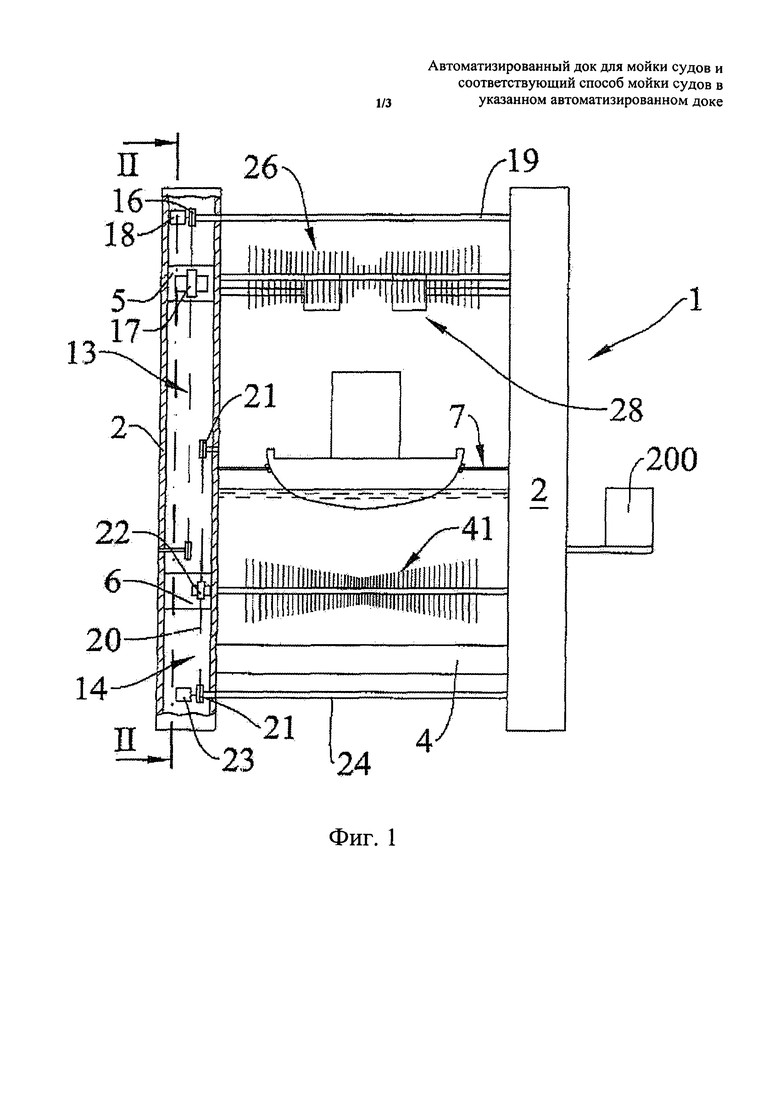
Фиг. 1 схематично изображает известную морскую установку для автоматической мойки судов;
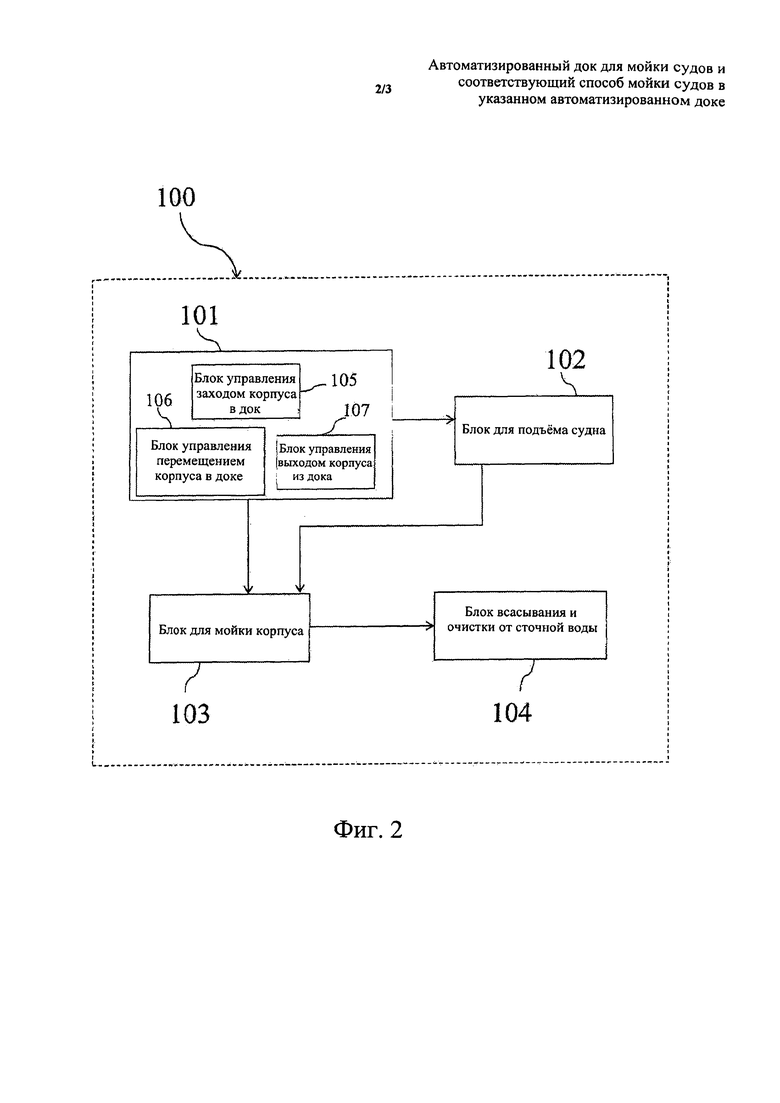
Фиг. 2 схематично изображает автоматизированный док для мойки судов в соответствии с настоящим изобретением;
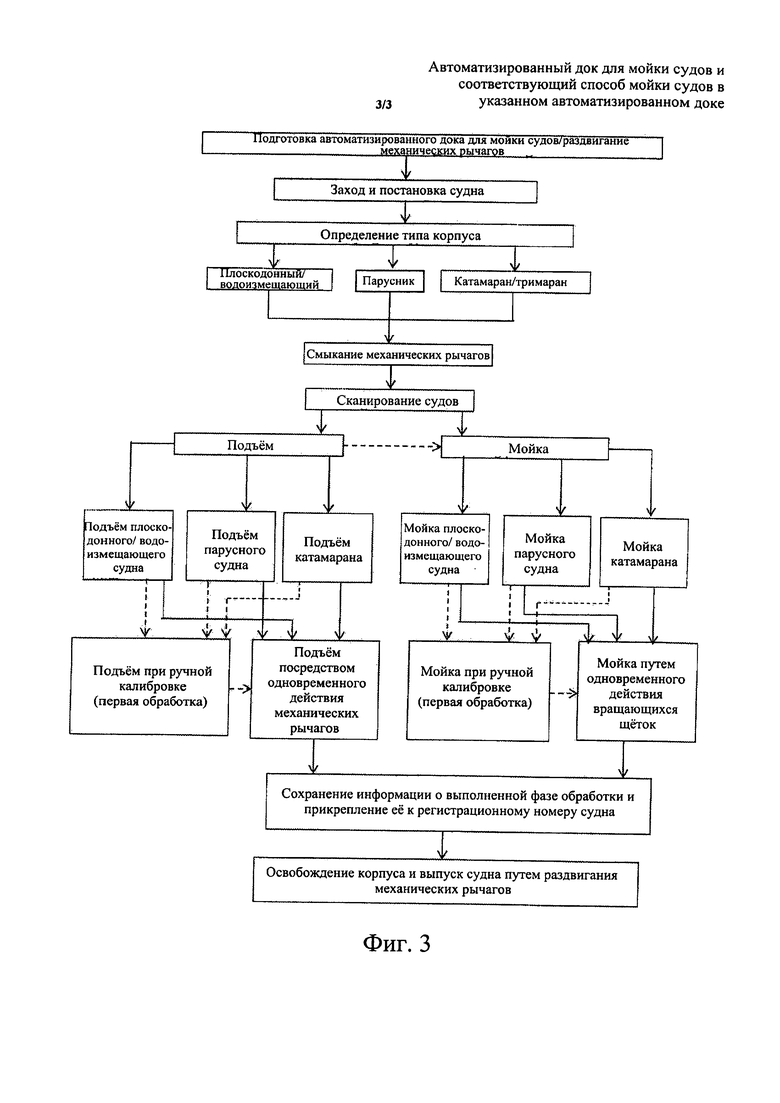
Фиг. 3 схематично изображает блок-схему способа мойки судов в соответствующем автоматизированном доке в соответствии с изобретением.
На указанных чертежах и, в частности, на Фиг. 2 изображен предложенный автоматизированный док для мойки судов. Если подробнее, автоматизированный док 100 для мойки судов содержит блок 101 перемещения для введения и перемещения основного корпуса судна внутри указанного дока, блок 102 для подъема судна, блок 103 для мойки основного корпуса и блок 104 для всасывания и очистки сточной воды после мойки основного корпуса.
Преимущественно, в соответствии с настоящим изобретением постановка судна в доке 100 осуществляется с помощью микрометрических средств GPS.
Более подробно блок 101 перемещения, предназначенный для введения и передвижения основного корпуса внутри указанного дока, содержит блок 105 для управления входом основного корпуса, выполненный с возможностью протягивания судов для постановки их на заданное расстояние вдоль оси внутри моющей установки 1, показанной на Фиг. 1, и в конечном счете для сканирования дна основного корпуса путем определения его геометрии и выполнения компьютерной реконструкции с помощью специального программного обеспечения.
Согласно одному из аспектов настоящего изобретения блок 101 перемещения содержит механические рычаги, используемые для управления указанным корпусом. Указанные механические рычаги выполнены с возможностью поддерживания контакта с корпусом судна посредством подвижных колес и/или скребков, и/или амортизирующих тампонов, которые поддерживаются в контакте с бортами судна посредством силовых приспособлений (гидравлического и/или электромеханического типа). В частности, силовые приспособления поддерживают контакт с основным корпусом, обеспечивая постоянное давление путем управления системой контроля посредством датчиков нагрузки и оптических считывающих устройств. Контактные приспособления прикреплены к механическим рычагам посредством шарнирной оси с возможностью вращения вокруг указанной оси и повторения профиля борта корпуса судна.
Согласно одному из аспектов изобретения док 100 содержит ряд плавучих доков под указанным корпусом, которые образуют рабочую область для выполнения технического обслуживания корпусов различных типов, дополнительных приспособлений, управляющих и силовых устройств судна.
Преимущественно согласно настоящему изобретению сканирование указанного корпуса выполняется с помощью лазерного луча с шагом 10 см.
Кроме того, блок 101 содержит блок 106 управления перемещением корпуса в доке 100 посредством механических рычагов.
Преимущественно согласно изобретению блок 106, управляемый гидравлически и/или электромеханически, определяет инверсию движения и обеспечивает пересечение области мойки как в направлении входа, так и в направлении выхода в зависимости от того, какие области корпуса нужно отмыть, и от заданной траектории мойки.
Наконец, блок 101 содержит блок 107 управления выходом корпуса, выполненный с возможностью сопровождения корпуса из дока 100 посредством механических рычагов.
Блок 102 подъема судна содержит механические шарнирные рычаги, выполненные с возможностью вытягивания в направлении заданных точек захвата корпуса судна, причем эти точки определяются на основании выявленной геометрии корпуса и осуществления подъема указанного корпуса в соответствии с действующими стандартами безопасности в механике.
Блок 103 мойки корпуса судна содержит горизонтальные цилиндрические вращающиеся щетки, снабженные соплами для сжатого воздуха и пригодные для очистки горизонтальных или наклонных поверхностей корпуса до определенного угла с дном корпуса, определенным путем сканирования и реконструированным с помощью специального программного обеспечения. Блок 103 также содержит вращающиеся цилиндрические вертикальные щетки, снабженные соплами для сжатого воздуха и выполненные с возможностью очистки бортовых поверхностей корпуса и всех поверхностей, которые нельзя обработать горизонтальными цилиндрическими щетками, например осевые трубопроводы, стойки, рули, гребные винты и каждое конкретное приспособление, обнаруженное при сканировании и реконструированное с помощью программного обеспечения. Кроме того, указанные щетки выполнены с возможностью повторения изменений формы дна любого корпуса посредством сервомеханической и/или гидравлической системы.
Согласно одному из аспектов изобретения всасывающий блок 104 выброса и очистки сточной воды после мойки корпуса присоединен к всасывающим впускным отверстиям, расположенным рядом с системой 100.
Согласно другому аспекту изобретения блок 104 всасывания и очистки, предназначенный для всасывания и очистки сточной воды после мойки корпуса, выполнен с возможностью сброса сточной воды в закрытый водный бассейн.
Как указано выше, настоящая заявка также относится к способу мойки судов в соответствующем вышеописанном автоматизированном доке.
Указанный способ включает следующие этапы:
- подготовку дока 100 путем раздвигания указанных механических рычагов, выполненных с возможностью захвата судна;
- обеспечение захода и постановки судов в доке 100;
- определение принадлежности корпуса к одному из следующих типов: плоскодонный/ водоизмещающий корпус, парусник, катамаран/тримаран;
- смыкание указанных механических рычагов для захвата судна;
- сканирование судов для реконструирования их трехмерной геометрии с помощью специального программного обеспечения;
- выполнение этапа обработки судна;
- сохранение информации о выполненной фазе обработки и прикрепление данной информации к регистрационному номеру судна;
- освобождение корпуса и выпуск судна путем раздвигания указанных механических рычагов.
На Фиг. 3 показана блок-схема способа мойки судов в указанном автоматизированном доке.
Согласно одному из аспектов изобретения этап сканирования судна для восстановления его трехмерной геометрии для реконструкции его трехмерной геометрии с помощью специального программного обеспечения включает этап сканирования погруженного корпуса с помощью сонара и определение профиля корпуса с помощью лазера.
Согласно другому аспекту изобретения обработка судна предполагает подъем судна или выполнение его мойки, или выполнение подъема и затем мойки судна. В частности, подъем судна выполняется различными способами в зависимости от типа судна, определенного на стадии классификации.
Преимущественно согласно настоящему изобретению при выполнении первой обработки судна этап подъема включает выполнение этапа сопровождения судна в поднятом положении путем ручной калибровки.
Кроме того, подъем включает выполнение подъема путем одновременного действия множества механических рычагов, одновременно работающих на точках захвата погруженного корпуса для обеспечения подъема судна.
Преимущественно согласно изобретению при первой обработке судна указанный этап мойки включает выполнение мойки путем ручной калибровки.
Кроме того, этап мойки включает мойку путем комбинированного действия вращающихся щеток, одновременно обрабатывающих погруженный корпус и борта судна.
Кроме того, этапу сканирования судна предшествует этап центрирования оси корпуса судна с осью доковой системы 100 с использованием геометрических данных и ретроактивного контроля.
Согласно одному из аспектов настоящего изобретения сканирование погруженного корпуса выполняют с помощью сонара-профиломера.
Преимущественно процесс мойки выполняют путем комбинированного действия вращающихся горизонтальных и вертикальных щеток.
Преимущественно согласно настоящему изобретению выполняют мойку дна, бортов, дрифтерных сетей, транца, судовых бульб, бортовых рулей и различных приспособлений судна.
Преимущественно согласно настоящему изобретению также выполняют мойку силовых органов и органов управления, таких как гребные винты, рули, трансмиссионные валы, стабилизирующие бортовые рули, шпигаты.
Преимущественно этап мойки включает этапы управления вращением щеток, активирования воздушно-водяных сопел для удаления окалины и активирования указанного блока для сброса сточных вод после мойки.
Преимущественно согласно настоящему изобретению во время перемещения судна в указанном блоке для мойки взаимное расположение щеток с учетом геометрии корпуса определяется с помощью специальной компьютерной программы управления, которая обеспечивает возможность передачи центральной управляющей системе точного положения корпуса и управления изменением геометрии положения щеток в зависимости от геометрии корпуса судна с учетом своевременно обнаруженного изменения.
Преимущественно согласно изобретению док 100 содержит щетки, предназначенные для обработки судовых приспособлений, таких как киль и руль, которые обеспечивают возможность выполнения очистки без контакта с корпусом.
Таким образом, указанный автоматизированный док для мойки судов и соответствующий способ мойки судов в указанном автоматизированном доке в соответствии с настоящим изобретением обеспечивают возможность точного управления подъемом и мойкой судна с помощью геометрического сканирования его поверхностей.
Другое преимущество указанного автоматизированного дока для мойки судов и соответствующего способа мойки судов в указанном доке согласно изобретению заключается в отсутствии необходимости поднятия судна из воды при использовании указанной установки для мойки.
Кроме того, указанный автоматизированный док для мойки судов и соответствующий способ мойки судов в указанном доке в соответствии с настоящим изобретением являются гораздо более эффективными и результативными по сравнению с известными системами и способами.
Наконец, очевидно, что предложенный автоматизированный док для мойки судов и соответствующий способ, описанные и проиллюстрированные в данной заявке, могут быть модифицированы и изменены в рамках объема настоящего изобретения, определенного прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемник для подачи блоков судов в сухой док | 1979 |
|
SU775220A1 |
| Сухой док для строительства судов | 1977 |
|
SU727515A1 |
| Распылительное устройство для автоматизированной окраски корпусов стоящих в доке судов | 1980 |
|
SU1113305A1 |
| Устройство для центровки судов в доке | 1987 |
|
SU1421610A2 |
| Модульный судоподъемный комплекс-док | 2020 |
|
RU2747062C1 |
| Устройство для центровки судов в доке | 1980 |
|
SU981096A1 |
| Способ постройки судов в доке | 1979 |
|
SU887345A1 |
| Устройство для центровки судов в доке | 1984 |
|
SU1221055A1 |
| Способ постройки судов в доке | 1979 |
|
SU797952A1 |
| Способ постройки судов в доке | 1977 |
|
SU950582A1 |
Изобретение относится к области судостроения и касается мойки (чистки) корпусов судов. Предложен автоматизированный док (100) для мойки судов, содержащий по меньшей мере один блок (103) для мойки корпуса судна, предназначенный для выполнения мойки судна; по меньшей мере один блок (101) перемещения, предназначенный для передвижения указанного корпуса в продольном направлении внутри дока (100); по меньшей мере один подъемный блок (102), предназначенный для подъема судна в доке (100). Блок (101) перемещения содержит по меньшей мере один блок (105) управления заходом корпуса в док (100), предназначенный для протягивания судов и их постановки внутри системы (100) и сканирования дна указанного корпуса, определения его геометрии и выполнения компьютерной реконструкции с помощью специального программного обеспечения; механические рычаги, обеспечивающие возможность манипулирования корпусом; по меньшей мере один блок (106) управления перемещением корпуса в доке (100) посредством указанных механических рычагов с учетом геометрии, определенной и реконструированной посредством указанного специального программного обеспечения; и по меньшей мере один блок (107) управления выходом указанного корпуса из дока (100) посредством указанных механических рычагов. Технический результат заключается в повышении точности управления процессом мойки судна, повышении эффективности процесса мойки судна. 2 н. и 11 з.п. ф-лы, 3 ил.
1. Автоматизированный док (100) для мойки судов, содержащий:
по меньшей мере один блок (103) для мойки корпуса судна, предназначенный для выполнения мойки указанного судна,
по меньшей мере один блок (101) перемещения, предназначенный для передвижения корпуса в продольном направлении внутри дока (100),
по меньшей мере один подъемный блок (102) для подъема судна внутри дока (100),
отличающийся тем, что указанный блок (101) перемещения содержит:
по меньшей мере один блок (105) управления заходом корпуса в док (100), выполненный с возможностью протягивания судов и их постановки внутри указанной системы (100) и с возможностью сканирования дна указанного корпуса, определения его геометрии и выполнения компьютерной реконструкции с помощью предназначенного для этого программного обеспечения,
механические рычаги, предназначенные для манипулирования указанным корпусом,
по меньшей мере один блок (106) управления перемещением указанного корпуса в доке (100) посредством механических рычагов с учетом геометрии, определенной и реконструированной с помощью указанной компьютерной программы, и
по меньшей мере один блок (107) управления выходом корпуса из дока (100) с помощью указанных механических рычагов.
2. Автоматизированный док (100) по п. 1, отличающийся тем, что он содержит по меньшей мере один блок (104) всасывания и очистки, предназначенный для всасывания и очистки сточных вод от мойки корпуса.
3. Автоматизированный док (100) по п. 2, отличающийся тем, что указанный блок (104) всасывания и очистки от сточных вод присоединен к всасывающим впускным отверстиям, расположенным рядом с доком (100).
4. Автоматизированный док (100) по п. 1, отличающийся тем, что указанный подъемный блок (102) содержит шарнирные механические рычаги, выполненные с возможностью вытягивания к определенным точкам захвата указанного корпуса, полученным на основании отсканированной геометрии, и для обеспечения подъема указанного корпуса.
5. Способ мойки судна в автоматизированном доке (100) для мойки судов, включающий этап мойки корпуса судна в указанном автоматизированном доке (100), отличающийся тем, что он включает следующие этапы:
раздвигание механических рычагов автоматизированного дока (100) для мойки судов для осуществления захвата указанного судна,
обеспечение захода и постановки указанного судна в автоматизированном доке (100) для мойки судов;
определение типа корпуса как одного из следующей группы: плоскодонный/водоизмещающий корпус, парусник, катамаран/тримаран;
смыкание указанных механических рычагов для захвата судна;
сканирование указанного судна для реконструирования его трехмерной геометрии с помощью предназначенного для этого программного обеспечения;
выполнение стадии обработки указанного судна;
сохранение информации, относящейся к указанной стадии обработки, и прикрепление ее к регистрационному номеру указанного судна;
освобождение указанного корпуса и выпуск судна путем раздвигания указанных механических рычагов.
6. Способ по п. 5, отличающийся тем, что на этапе сканирования судна для реконструирования его трехмерной геометрии с помощью предназначенного для этого программного обеспечения выполняют сканирование погруженной части его корпуса с помощью сонара и лазера для определения профиля указанного корпуса.
7. Способ по п. 5, отличающийся тем, что на указанной стадии обработки судна выполняют один из этапов, выбранный из следующей группы:
подъем судна;
мойка судна;
последовательное осуществление подъема и мойки судна.
8. Способ по п. 7, отличающийся тем, что на этапе подъема выполняют сопровождение судна в поднятом положении путем ручной калибровки при выполнении его первой обработки.
9. Способ по п. 7, отличающийся тем, что на этапе подъема выполняют подъем посредством нескольких механических рычагов, одновременно воздействующих на точки захвата погруженной части корпуса для обеспечения подъема указанного судна.
10. Способ по п. 7, отличающийся тем, что на этапе мойки выполняют мойку с помощью ручной калибровки при первой обработке судна.
11. Способ по п. 7, отличающийся тем, что на этапе мойки выполняют мойку с помощью комбинированного действия вращающихся щеток, одновременно обрабатывающих погруженную часть корпуса и борта судна.
12. Способ по п. 5, отличающийся тем, что перед этапом сканирования судна выполняют центрирование оси корпуса судна с осью дока (100).
13. Способ по п. 5, отличающийся тем, что на этапе сканирования судна выполняют сканирование погруженной части корпуса с помощью сонара-профиломера.
| WO 2007062886 A1, 07.06.2007 | |||
| DE 19734073 C1, 12.11.1998 | |||
| СИСТЕМА УПРАВЛЕНИЯ ПОТОКАМИ ДАННЫХ | 2020 |
|
RU2723908C1 |
| US 5445101 A, 29.08.1995 | |||
| US 7444952 B1, 04.11.2008 | |||
| Устройство для обработки корпуса судна в доке | 1980 |
|
SU948765A1 |
| Автоматическое устройство для обработки корпусов судов | 1978 |
|
SU789318A1 |
| Зачистной док | 1989 |
|
SU1682234A1 |

