Изобретение относится к области электротехники и может найти применение в составе систем, в которых необходимо управление угловой скоростью с высокой точностью.
Известно устройство для регулирования и стабилизации скорости вращения двигателя постоянного тока [А.С. 183264, СССР. Устройство для регулирования и стабилизации скорости вращения двигателя постоянного тока / Ю. А. Ковалев. - № 1001998/24-7; заявл. 15.04.1965; опубл. 17.06.1966; бюл. № 13], содержащее двухкаскадный транзисторный усилитель постоянного тока с проходным и усилительным транзистором с дополнительным транзистором, входная цепь которого подключена к эмиттерному сопротивлению проходного транзистора, а коллектор - между базой и базовым сопротивлением усилительного транзистора.
Недостатком этого устройства является принципиальная техническая невозможность выбора таких параметров в рамках данной схемы, что устройство было бы устойчивым, при этом установившаяся ошибка по квазипостоянному возмущающему моменту произвольной величины в пределах линейной характеристики двигателя была бы равна нулю.
В качестве прототипа был взят гиромотор в составе датчика угловых скоростей ДУС-Б-2Б [Унифицированный ряд малогабаритных гироскопических датчиков угловых скоростей типа ДУС-Б-2Б (на постоянном токе): Техническое описание и инструкция по эксплуатации. - 1971. - 20 с.]. В нём использован центробежный регулятор частоты вращения гиромотора, который работает следующим образом: после превышения центробежной силы определённого порога происходит размыкание контактов и в цепь включается дополнительное сопротивление, ток в цепи ротора уменьшается, обороты падают под действием противо-ЭДС и моментов сопротивления.
Недостатком данного устройства, взятого за прототип, является невозможность задания различных величин угловой скорости, а также невысокая точность работы из-за наличия залипания в контакте центробежного регулятора.
Техническим результатом изобретения является расширение функциональности, которое состоит в регулировании угловой скорости двигателя в широком диапазоне, а также в повышении точности регулирования скорости вращения.
Технический результат достигается тем, что в устройстве управления угловой скоростью двигателя постоянного тока, выполненном в виде электрической машины независимого возбуждения, в цепь якоря которого последовательно включён добавочный резистор, новым является то, что вход якоря двигателя подключён к выходу суммирующего усилителя, к первому входу которого подключён задатчик угловой скорости, ко второму входу суммирующего усилителя по типу положительной обратной связи подключён добавочный резистор, при этом коэффициент передачи от второго входа к выходу суммирующего усилителя определяется формулой

где 


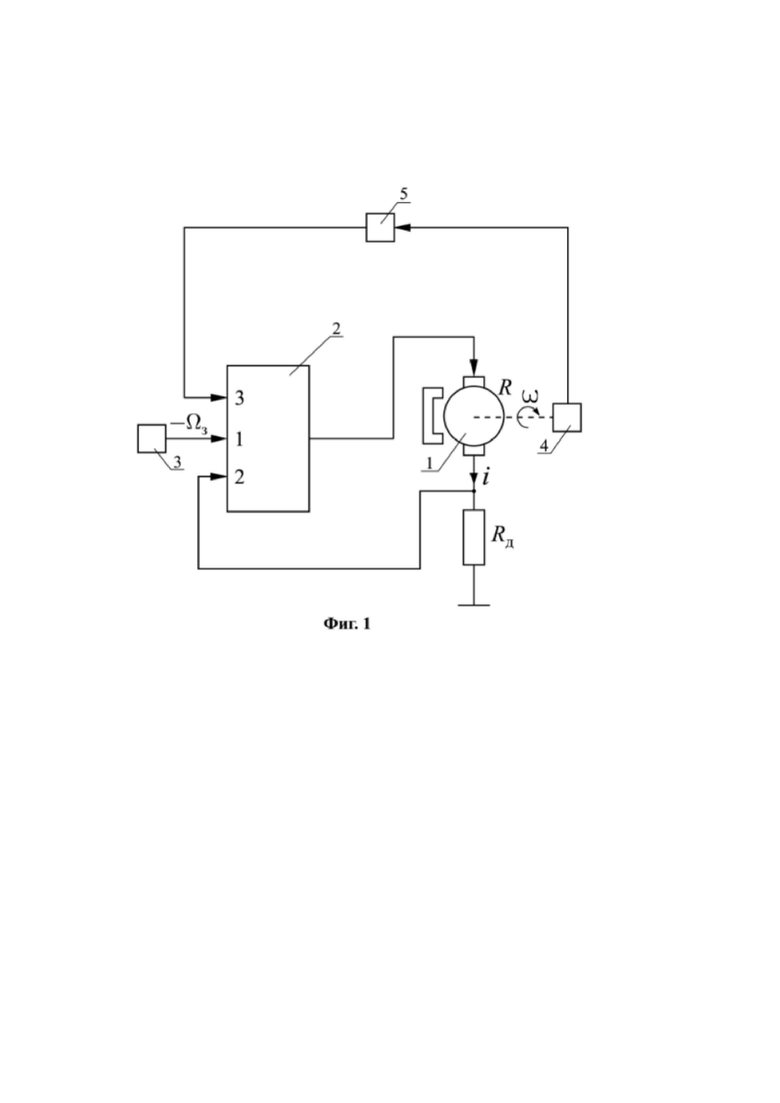
Сущность изобретения поясняется фиг. 1-3, где введены следующие обозначения:
1 - двигатель постоянного тока, выполненный в виде электрической машины независимого возбуждения;
2 - суммирующий усилитель;
3 - задатчик угловой скорости;
4 - датчик угловой скорости;
5 - дифференциатор;
6 - операционный усилитель;
7 - усилитель мощности;






















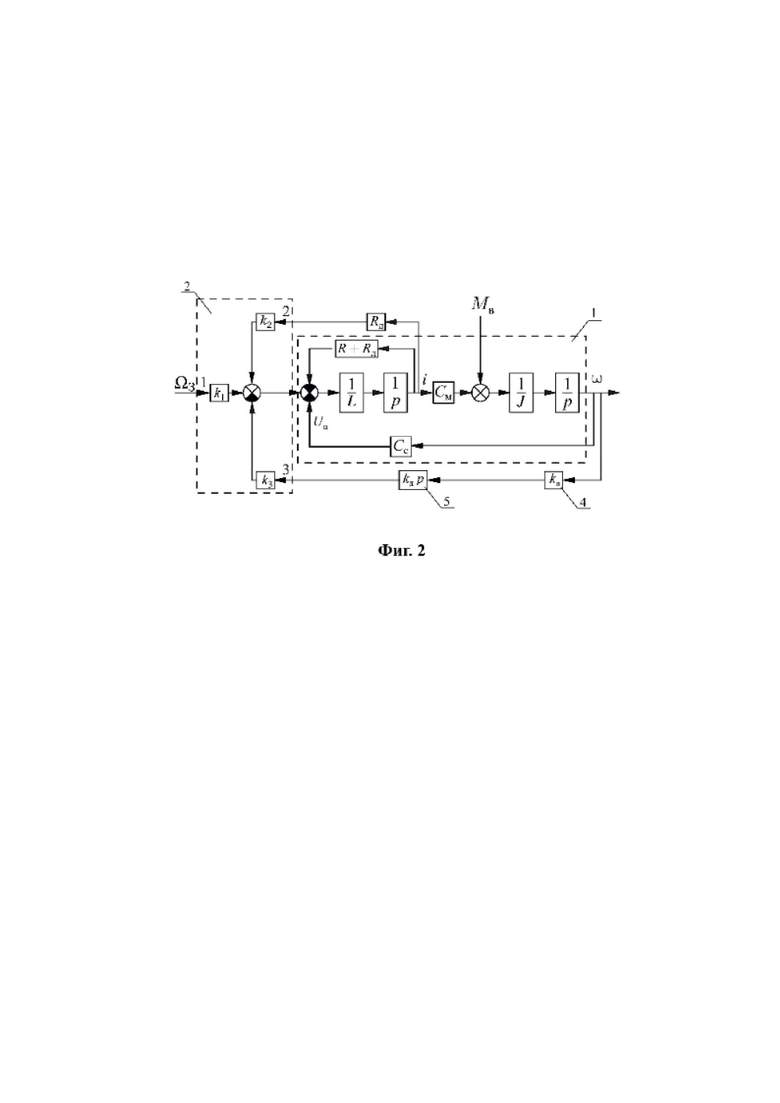
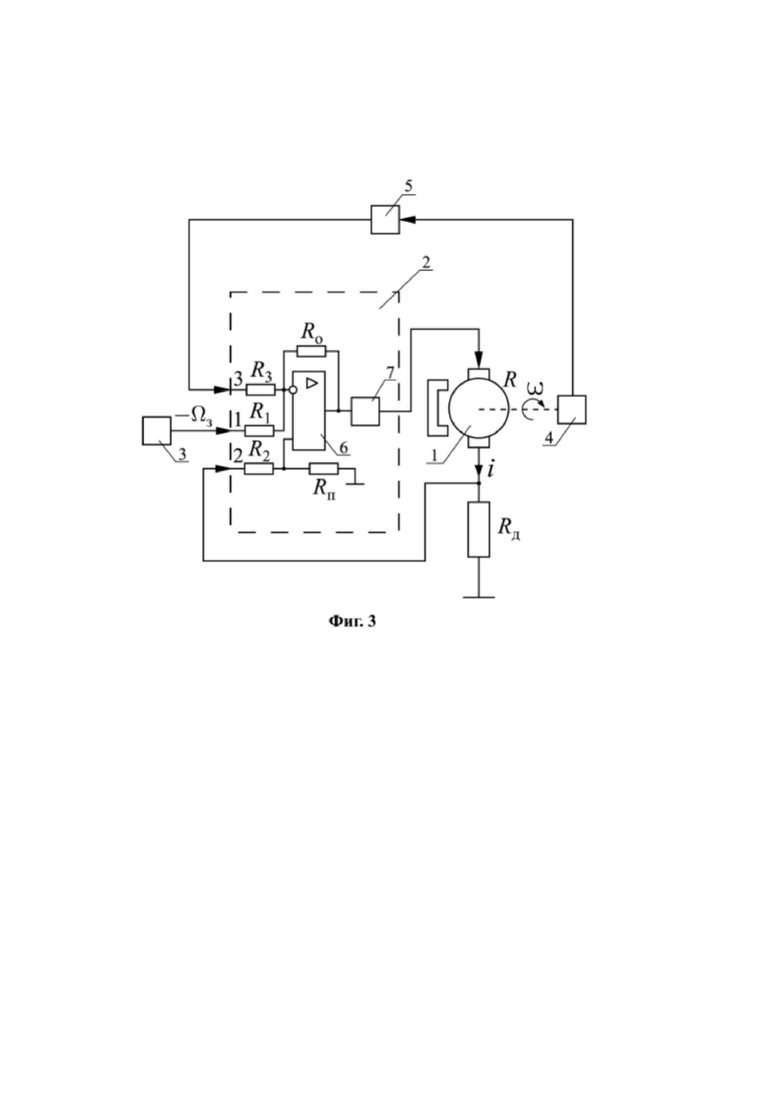
На фиг. 1 и фиг. 3 показана электрическая функциональная схема, при этом на фиг. 3 приведён пример реализации суммирующего усилителя 2. На фиг. 2 изображена структурная схема.
В устройство входит двигатель постоянного тока 1, выполненный в виде электрической машины независимого возбуждения. С якорем двигателя 1 механически связан датчик угловой скорости 4, который по своей сути может быть, например, тахогенератором. Также датчик угловой скорости 4 может представлять собой датчик Холла, установленный на корпусе двигателя 1, с магнитом на якоре двигателя 1. Выход датчика угловой скорости 4 подключён к дифференциатору 5. В роли дифференциатора 5 может выступать активный фильтр в виде дифференцирующего звена или цифровое вычислительное устройство. Выход дифференциатора 5 подключён к третьему входу суммирующего усилителя 2, выход которого соединён с входом якоря двигателя 1. На первый вход суммирующего усилителя 2 подключён задатчик угловой скорости 3. В цепь якоря двигателя 1 последовательно включён добавочный резистор 
Работа устройства управления угловой скоростью двигателя постоянного тока описывается уравнением динамики

где 



где 



На основе приведённых уравнений составлена структурная схема на фиг. 2. По структурной схеме можно реализовать передаточную функцию 



где 


Устройство управления гиромотором работает следующим образом. Задатчик угловой скорости 3 подаёт сигнал требуемой угловой скорости 


Согласно теореме о конечном значении оригинала по передаточной функции 

При действии неопределённых квазипостоянных возмущающих моментов угловая скорость будет снижаться, тем самым снижая и противо-ЭДС, возникнет ток 

на якорь двигателя постоянного тока 1, компенсируя тем самым падение напряжения на активном сопротивлении якоря 



Сигнал датчика угловой скорости 4, пропускаемый через дифференциатор 5, вносит в устройство необходимое демпфирование и используется для придания устойчивости и заданного качества переходных процессов. Действительно, в установившемся режиме при действии постоянного возмущающего момента 
т. е. устройство является астатической по постоянному возмущающему моменту системой управления.
Под квазипостоянным возмущающим моментом здесь понимается либо кусочно-постоянный возмущающий момент, периоды постоянных значений которого много больше времени переходных процессов, либо возмущающий момент, скорость изменения которого много меньше скорости переходных процессов. При этом установившаяся ошибка по монотонно растущему возмущающему моменту (им можно аппроксимировать различные зависимости возмущающего момента от времени) оценивается по передаточной функции 

где 
В качестве суммирующего усилителя 2, как на фиг. 3, может быть использован операционный усилитель 6, соединённый последовательно с усилителем мощности 7 с коэффициентом передачи 













Таким образом, применение предлагаемого устройства управления угловой скоростью двигателя постоянного тока позволяет регулировать угловую скорость двигателя в широком диапазоне, а также повысить точность регулирования скорости вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Одноосный индикаторный горизонтальный гиростабилизатор | 2020 |
|
RU2750027C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| Электромеханический привод с механической характеристикой, адаптивной к действию нагрузки | 2022 |
|
RU2783044C1 |
| Электропривод постоянного тока | 1983 |
|
SU1145438A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Многодвигательный электропривод | 1985 |
|
SU1410264A1 |
| АППАРАТ НА ВОЗДУШНОЙ ПОДУШКЕ | 2013 |
|
RU2527640C1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1153381A1 |
| Реверсивный вентильный электродвигатель | 1987 |
|
SU1431015A1 |
| ЭЛЕКТРОПРИВОД С АДАПТИВНЫМ РЕГУЛИРОВАНИЕМ ТОКА | 1993 |
|
RU2095930C1 |
Изобретение относится к области электротехники, а именно к устройствам управления угловой скоростью вращения двигателей, и может найти применение в составе систем, в которых необходимо управление угловой скоростью с высокой точностью. Устройство управления угловой скоростью двигателя постоянного тока (1), выполненного в виде электрической машины независимого возбуждения, состоит из добавочного резистора (

где 



Устройство управления угловой скоростью двигателя постоянного тока, выполненного в виде электрической машины независимого возбуждения, в цепь якоря которого последовательно включён добавочный резистор, отличающееся тем, что вход якоря двигателя подключён к выходу суммирующего усилителя, к первому входу которого подключён задатчик угловой скорости, ко второму входу суммирующего усилителя по типу положительной обратной связи подключён добавочный резистор, при этом коэффициент передачи от второго входа к выходу суммирующего усилителя определяется формулой
где 


| Устройство для регулирования скорости электродвигателя | 1980 |
|
SU999990A3 |
| Электропривод постоянного тока | 1983 |
|
SU1115189A1 |
| Электропривод постоянного тока | 1986 |
|
SU1328917A1 |
| US 9178460B2, 09.11.2015 | |||
| US 2012007534 A1, 12.01.2012. | |||

