Изобретение относится к транспортному машиностроению, в частности к движителям транспортных средств высокой проходимости, и может быть использовано в качестве шасси кресел-колясок для преодоления последними лестничных маршей общего пользования в колесно-шагающем режиме.
Известен колесно-шагающий движитель / см. авт.с вид. №552232 (кл. B62D 57/02) от 10.03.1975/ с приводом вращения ходового колеса, выполненным по схеме планетарно-рычажного механизма.
Известный колесно-шагающий движитель-прототип неоправданно усложнен конструктивно и технологически в части привода вращения ходового колеса для того, чтобы использовать его в качестве шасси кресел-колясок с целью преодоления последними лестничных маршей общего пользования, а также для движения как по рыхлым почвам (песок, торф, снег и т.п.), так и по твердым опорным поверхностям (асфальт, бетон и т.п.) с преодолением препятствий в виде рвов, порогов, бордюров, эскарпов.
С целью упрощения конструкции и технологии выполнения планетарно-рычажного механизма привода вращения ходового колеса в колесно-шагающем движителе с приводом вращения ходового колеса, выполненным по схеме планетарно-рычажного механизма, с корпусом движителя планетарно-рычажный механизм привода вращения ходового колеса связан посредством полуоси ходового колеса, смонтированной эквидистантно на одной из двух равновеликих шестерен-сателлитов на концах рычага, имеющих внешнее зацепление с равновеликой им неподвижной солнечной шестерней в середине рычага.
Предлагаемое изобретением техническое решение иллюстрируется фиг.
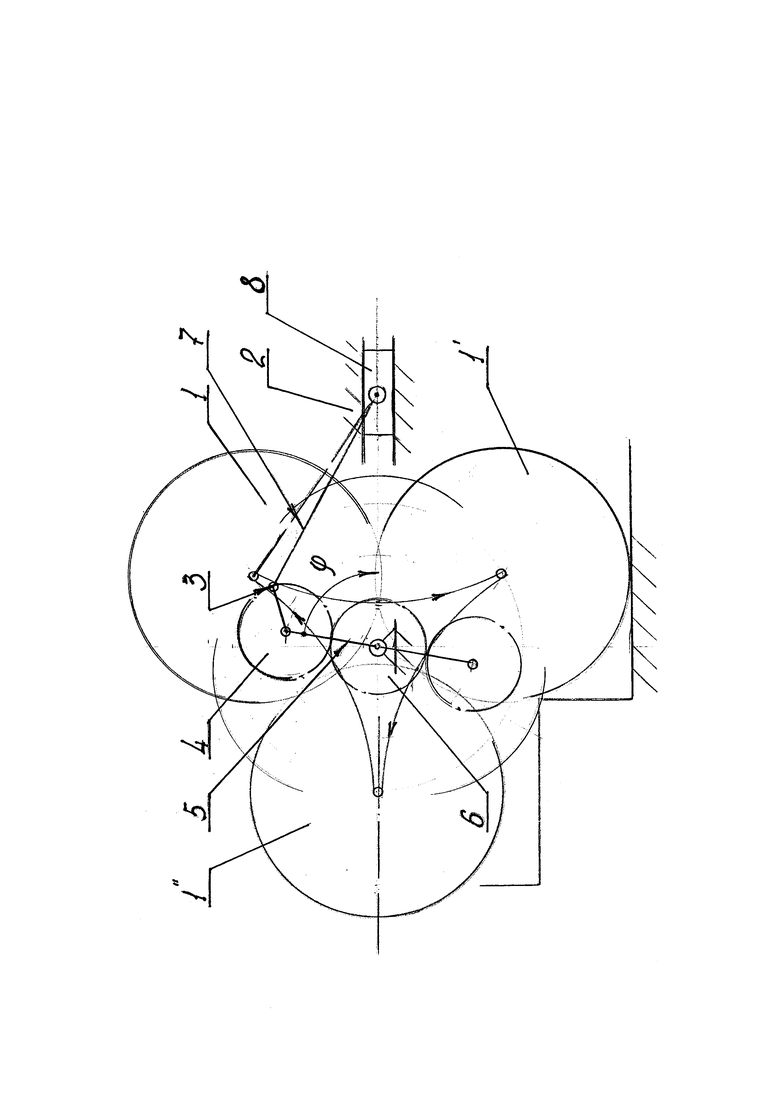
Предлагаемый изобретением колесно-шагающий движитель с приводом вращения ходового колеса 1, выполненным по схеме планетарно-рычажного механизма, отличается тем, что с корпусом 2 движителя планетарно-рычажный механизм привода вращения ходового колеса 1 связан посредством полуоси 3 ходового колеса 1, смонтированной эквидистантно на одной из двух равновеликих шестерен-сателлитов 4 на концах рычага 5, имеющих внешнее зацепление с равновеликой им неподвижной солнечной шестерней 6 в середине рычага 5.
Рычаг-шатун 7, кинематически связывающий полуось 3 ходового колеса 1 с ползуном 8 корпуса 2 движителя, задает направление вращения ходовому колесу 1 (на фиг. по часовой стрелке) и скорость смены позиции (см. 1, 1', 1'') ходового колеса 1. При равновеликих шестернях-сателлитах 4 на концах рычага 5, имеющих внешнее зацепление с равновеликой им неподвижной солнечной шестерней 6 в середине рычага 5, полуось 3 ходового колеса 1 описывает трехвершинную гипоциклоиду, позволяя, например, в шагающем режиме преодолевать препятствие в виде лестничного марша общего пользования. При этом механизм вращения ходового колеса 1 вокруг полуоси 3 может быть выполнен по схеме мотор-колеса.
Таким образом, по мнению заявителя, предлагаемое изобретением техническое решение является новым, имеет изобретательский уровень и промышленно применимо, упрощает конструктивно и технологически механизм привода вращения ходового колеса колесно-шагающего движителя для преодоления препятствий в виде рвов, порогов, бордюров, эскарпов, включая лестничные марши общего пользования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шасси кресла-коляски | 2024 |
|
RU2821604C1 |
| Шасси кресла-коляски | 2021 |
|
RU2770500C1 |
| Шасси колесно-шагающего типа | 2023 |
|
RU2812375C1 |
| Шасси кресла-коляски | 2022 |
|
RU2788211C1 |
| Шасси кресла-коляски | 2023 |
|
RU2804148C1 |
| Шасси кресла-коляски | 2022 |
|
RU2785234C1 |
| Шасси кресла-коляски | 2022 |
|
RU2798586C1 |
| Шасси кресла-коляски | 2020 |
|
RU2747059C1 |
| Шасси кресла-коляски Н.П. Дядченко | 2020 |
|
RU2742661C1 |
| Шасси кресла-коляски | 2020 |
|
RU2741135C1 |
Изобретение относится к движителям транспортных средств высокой проходимости и может быть использовано в качестве шасси кресел-колясок для преодоления последними лестничных маршей общего пользования в колесно-шагающем режиме. Колесно-шагающий движитель с приводом вращения ходового колеса выполнен по схеме планетарно-рычажного механизма. С корпусом движителя планетарно-рычажный механизм привода вращения ходового колеса связан посредством полуоси ходового колеса, смонтированной эквидистантно на одной из двух равновеликих шестерен-сателлитов на концах рычага, имеющих внешнее зацепление с равновеликой им неподвижной солнечной шестерней в середине рычага. Достигается упрощение конструкции и технологии выполнения планетарно-рычажного механизма привода вращения ходового колеса в колесно-шагающем движителе с приводом вращения ходового колеса. 1 ил.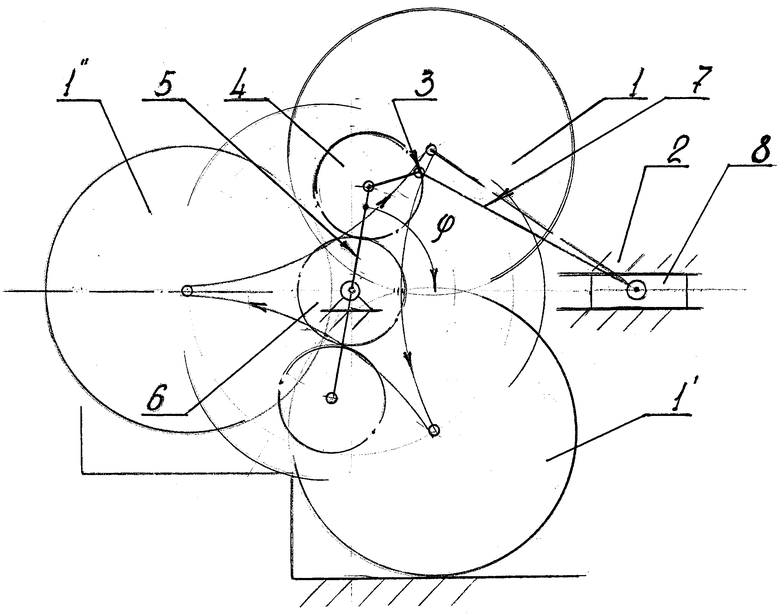
Колесно-шагающий движитель с приводом вращения ходового колеса, выполненным по схеме планетарно-рычажного механизма, отличающийся тем, что с корпусом движителя планетарно-рычажный механизм привода вращения ходового колеса связан посредством полуоси ходового колеса, смонтированной эквидистантно на одной из двух равновеликих шестерен-сателлитов на концах рычага, имеющих внешнее зацепление с равновеликой им неподвижной солнечной шестерней в середине рычага.
| Колесно-шагающий движитель | 1975 |
|
SU552232A1 |
| Колесно-шагающий движитель | 1975 |
|
SU534386A1 |
| 0 |
|
SU193473A1 | |
| МНОГОФУНКЦИОНАЛЬНАЯ ПРЕОБРАЗУЕМАЯ ТРАНСПОРТНАЯ МАШИНА ДЛЯ ОБРАБОТКИ ПОЧВЫ | 1999 |
|
RU2218684C2 |

