Изобретение относится к области радиотехники и может быть использовано в радиотехнических системах обнаружения с применением в качестве зондирующих импульсных кодофазоманипулированных (КФМ) сигналов.
В настоящее время радиотехнические системы обнаруживают все меньшие по амплитуде сигналы. Для обнаружения такого сигнала применяют протяженные зондирующие сигналы. Однако источник сигнала может находится настолько близко к приемнику, что из-за закрытия приемника на время излучения сигнала передатчиком на вход последнего поступит не полный, а укороченный сигнал. Корреляционно-фильтровая обработка такого укороченного КФМ-сигнала приводит к резкому росту уровня боковых лепестков, что делает невозможным его достоверное обнаружение.
Известен ряд устройств устранения боковых лепестков для КФМ-сигнала.
Известен фильтр радиолокационного сигнала (Зарецкий СВ., «Метод подавления боковых лепестков сигнала в виде бинарной фазоманипуфлированной последовательности», Электронный научный журнал «Исследования в России», с. 846), основанный на использовании согласованного фильтра и предназначенный для детектирования сигнала за счет использования согласованной фильтрации и подавления боковых лепестков сигнала после согласованной фильтрации за счет применения дополнительныхметодов. Он состоит из согласованного фильтра, выход которого соединен с разветвите л ем. В каждом канале разветвителя сигнал сдвигается по времени на величину пропорциональную τ и домножается на определенный комплексный коэффициент ki где τ - период времени, равный длительности одного шага входной последовательности. Выходы умножителей и выход согласованного фильтра соединены с входами сумматора, выход сумматора является выходом фильтра.
Достоинствами данного устройства являются независимость от типа задаваемой последовательности, возможность подавления конкретного бокового лепестка, простота реализации. Недостатками являются увеличение общего уровня шума при суммировании сигнала с разных каналов, увеличение уровня боковых лепестков за пределами «расчищаемой» зоны.
Известен фильтр для кода Баркера (US Patent №4 095 225, June 13, 1978, International Classificatory G01S 7/28, Range side lobe suppression method for a phase modulated radar pulse). На входе данного фильтра размещен сумматор, соединенный с последовательным соединением линий задержки, а также с временным инвертором. Выходы с линий задержки соединены с входами сумматора. Выход временного инвертора соединен со вторым сумматором, который также соединен со вторым последовательным соединением линий задержки, а также со вторым временным инвертором. Выход линии задержки соединен со вторым сумматором.
Недостатками данного фильтра являются непропорционально возрастающие сложность реализации и время обработки для сигналов с большой длительностью.
Известен фильтр (RU 1105002 U1, 20.11.2011, International Classificatory G01S 7/292, Фильтр подавления боковых лепестков сложного радиолокационного сигнала). Фильтр содержит инверсный фильтр для кода Баркера длины М, выход которого соединен с селектором k, k+1,…k+М отсчета, выход каждого из которых соединен с соответствующими инверсными фильтрами для кода Баркера длины N, выход каждого из которых соединен с входами первого мультиплексора, выходы которого соединены с временными селекторами k, k+1,…k+MN отсчетов, выход каждого из которых соединен с соответствующим инверсным фильтром для кода Баркера длины Р, выход каждого из которых соединен со входом второго мультиплексора.
Недостатками данного фильтра являются возможность обработки сигналов только определенной кодовой последовательности и невозможность обработки укороченного эхо-сигнала.
Описанный выше фильтр является наиболее близким по совокупности существенных признаков к предлагаемому способу.
Целью изобретения является повышение вероятности обнаружения укороченного КФМ-сигнала, обнаружение которого согласованным фильтром не эффективно в силу роста боковых лепестков в его отклике.
Способ заключается в том, что принимаемый сигнал  обрабатывается параллельно многоканальной системой из S инверсных фильтров, характеристика каждого инверсного фильтра системы рассчитана для опорного сигнала, укороченного на количество дискрет, соответствующее номеру фильтра. С выхода каждого инверсного фильтра сигнал селектируется в результате чего формируется две выборки. Первая выборка содержит временной отсчет отклика инверсного фильтра, в котором ожидается сигнал в случае, если степень его укорочения соответствует данному фильтру. Вторая выборка содержит прочие отсчеты отклика инверсного фильтра. Из второй выборки вычисляется средняя сумма по модулю ее отсчетов. Далее вычисляется отношение по модулю отсчета из первой выборки к средней сумме по модулю отсчетов из второй выборки. С результатом деления выполняется пороговая обработка. Если в результате пороговой обработки порог превышен, то на выход данного канала системы подается сигнал из первой выборки, в противном случае с выхода канала поступает ноль. Выходные сигналы всех каналов суммируются и суммарный сигнал является результатом работы способа.
обрабатывается параллельно многоканальной системой из S инверсных фильтров, характеристика каждого инверсного фильтра системы рассчитана для опорного сигнала, укороченного на количество дискрет, соответствующее номеру фильтра. С выхода каждого инверсного фильтра сигнал селектируется в результате чего формируется две выборки. Первая выборка содержит временной отсчет отклика инверсного фильтра, в котором ожидается сигнал в случае, если степень его укорочения соответствует данному фильтру. Вторая выборка содержит прочие отсчеты отклика инверсного фильтра. Из второй выборки вычисляется средняя сумма по модулю ее отсчетов. Далее вычисляется отношение по модулю отсчета из первой выборки к средней сумме по модулю отсчетов из второй выборки. С результатом деления выполняется пороговая обработка. Если в результате пороговой обработки порог превышен, то на выход данного канала системы подается сигнал из первой выборки, в противном случае с выхода канала поступает ноль. Выходные сигналы всех каналов суммируются и суммарный сигнал является результатом работы способа.
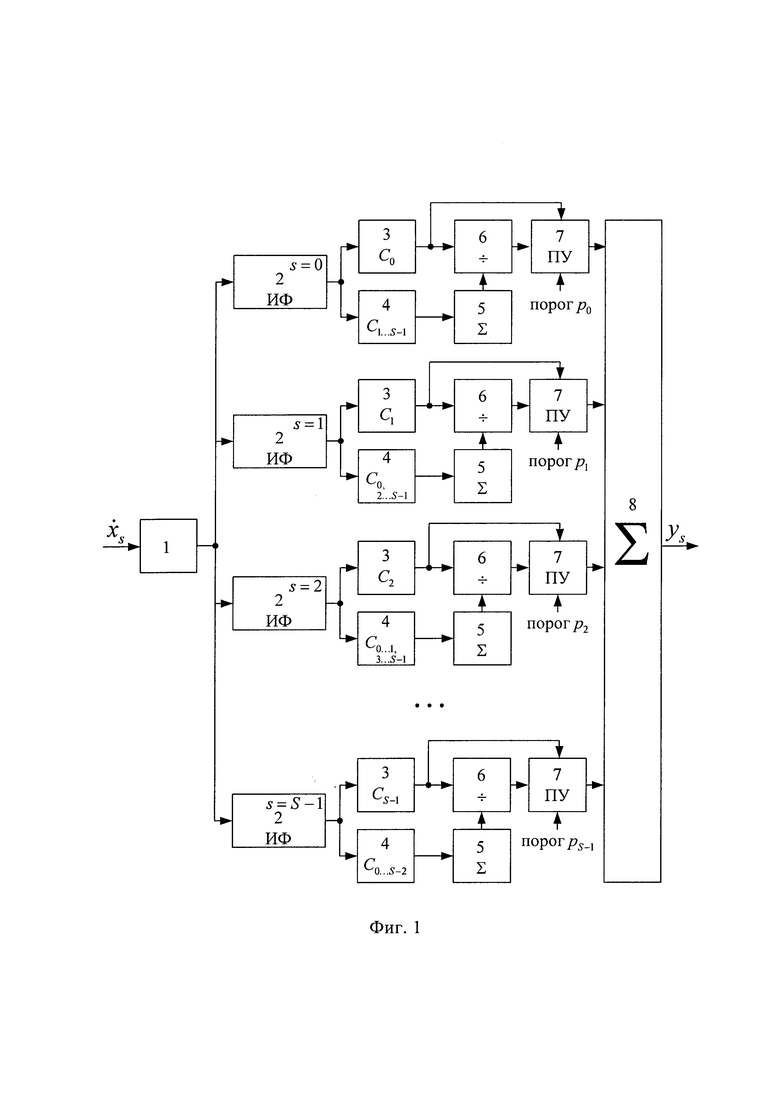
Предлагаемый способ иллюстрируется чертежами, где на фиг. 1 представлен вариант технической реализации способа. Для реализацииспособа с временными отсчетами укороченного сигнала  проводится распараллеливание для многоканальной обработки 1 в системе из S инверсных фильтров 2. В каждом канале системы с сигналом с выхода инверсного фильтра 2 проводится селектирование для формирования выборок 3 и 4. Выборка 3 содержит временной отсчет отклика инверсного фильтра, в котором ожидается сигнал в случае, если степень его укорочения соответствует данному фильтру. Выборка 4 содержит прочие отсчеты отклика инверсного фильтра. Из отсчетов выборки 4 вычисляется их средняя по модулю сумма 5. Далее вычисляется отношение по модулю 6 отсчета из первой выборки 4 к средней сумме по модулю отсчетов из второй выборки 5. С результатом деления 6 выполняется пороговая обработка 7. Если в результате пороговой обработки 7 порог р превышен, то на выход данного канала системы подается сигнал из первой выборки 3, в противном случае с выхода канала поступает ноль. Выходные сигналы всех каналов суммируются и суммарный сигнал 8 является результатом работы способа.
проводится распараллеливание для многоканальной обработки 1 в системе из S инверсных фильтров 2. В каждом канале системы с сигналом с выхода инверсного фильтра 2 проводится селектирование для формирования выборок 3 и 4. Выборка 3 содержит временной отсчет отклика инверсного фильтра, в котором ожидается сигнал в случае, если степень его укорочения соответствует данному фильтру. Выборка 4 содержит прочие отсчеты отклика инверсного фильтра. Из отсчетов выборки 4 вычисляется их средняя по модулю сумма 5. Далее вычисляется отношение по модулю 6 отсчета из первой выборки 4 к средней сумме по модулю отсчетов из второй выборки 5. С результатом деления 6 выполняется пороговая обработка 7. Если в результате пороговой обработки 7 порог р превышен, то на выход данного канала системы подается сигнал из первой выборки 3, в противном случае с выхода канала поступает ноль. Выходные сигналы всех каналов суммируются и суммарный сигнал 8 является результатом работы способа.
На фиг.2-8 представлены временные диаграммы, иллюстрирующие работу способа, на примере обработки сигнала длительностью S=13 дискрет с манипуляцией фаз согласно 13-ти позиционному коду Баркера.
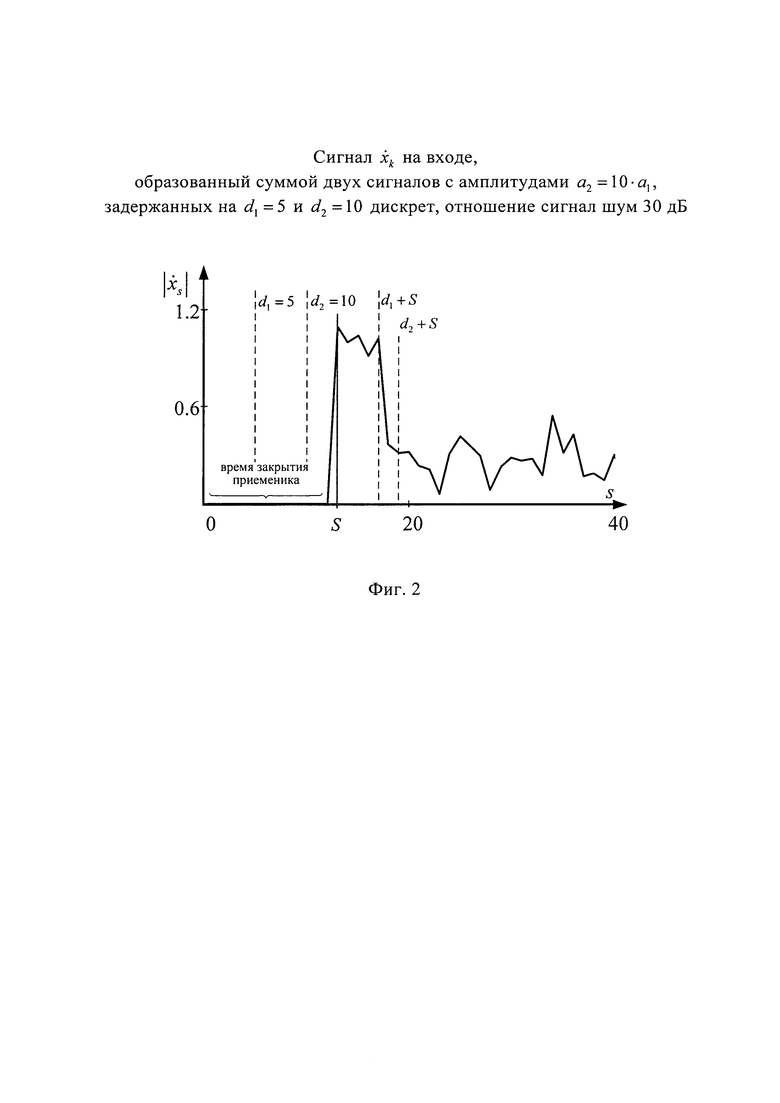
На фиг. 2 проиллюстрирован сигнал  на входе, образованный суммой двух сигналов с амплитудами a2=10.а1, задержанных на d1=5 и d2=10 дискрет. Из-за закрытия приемника на время излучения импульса сигналы укорочены на S-d1=8 и S-d2=3 дискрета. Отношение сигнал-шум, рассчитанное относительно полного сигнала, составляет 30 дБ.
на входе, образованный суммой двух сигналов с амплитудами a2=10.а1, задержанных на d1=5 и d2=10 дискрет. Из-за закрытия приемника на время излучения импульса сигналы укорочены на S-d1=8 и S-d2=3 дискрета. Отношение сигнал-шум, рассчитанное относительно полного сигнала, составляет 30 дБ.
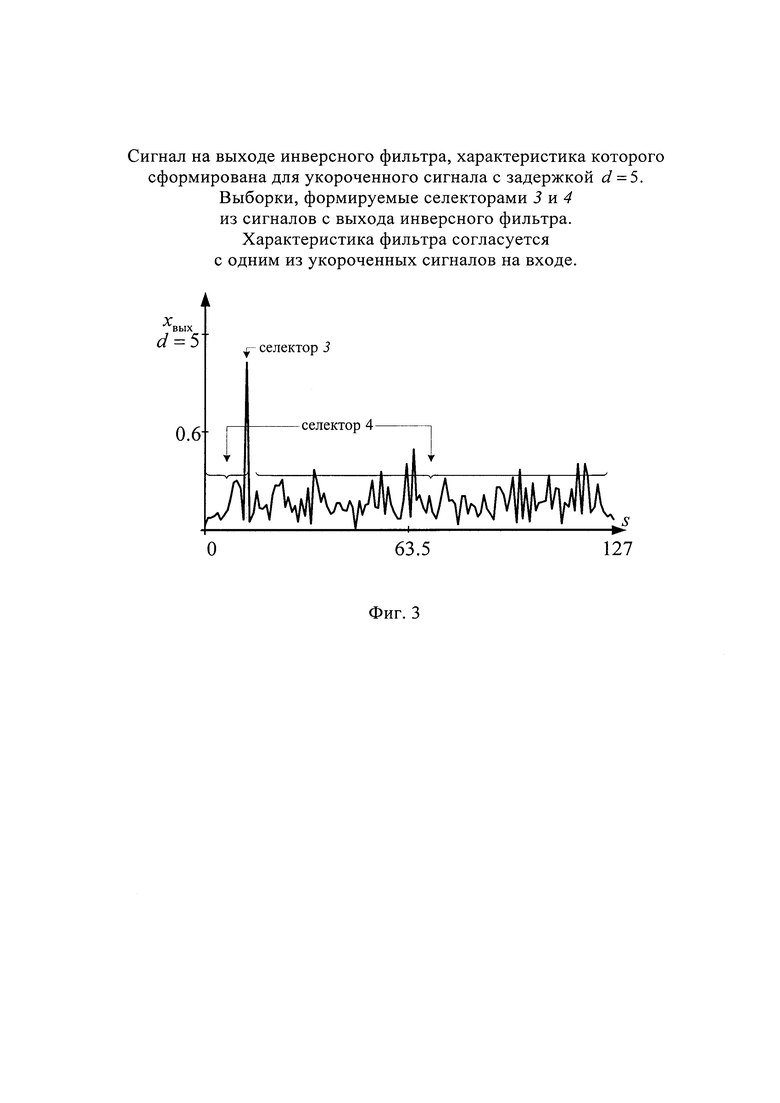
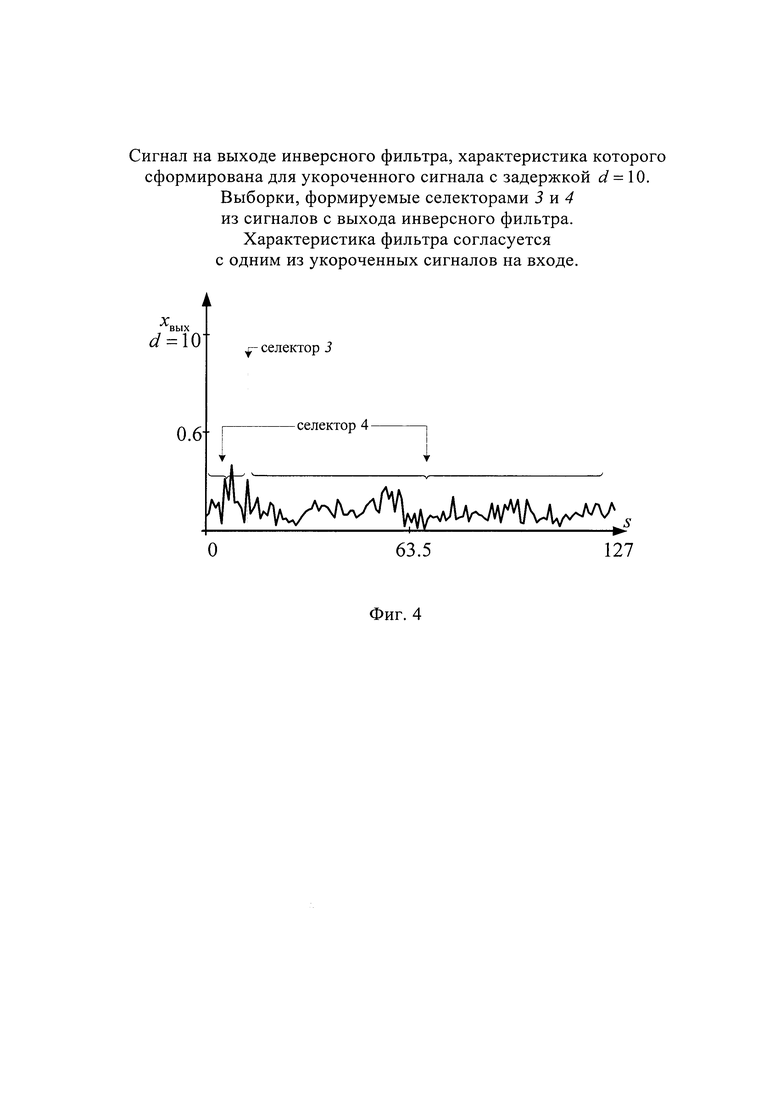
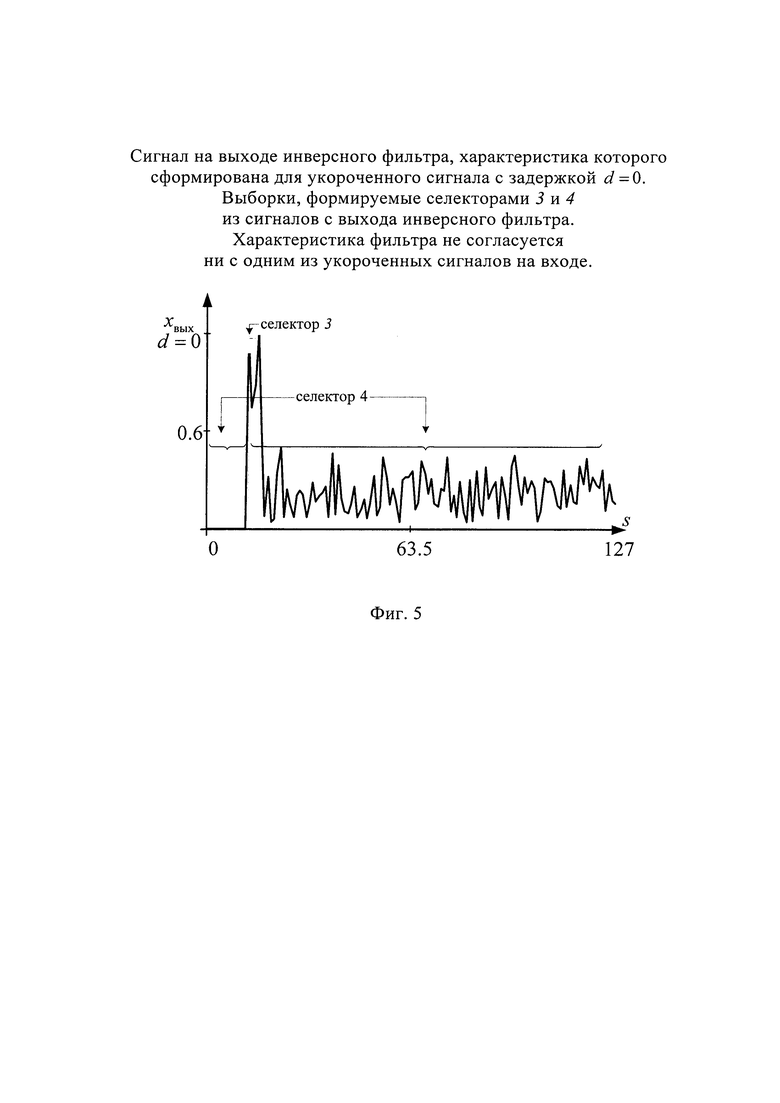
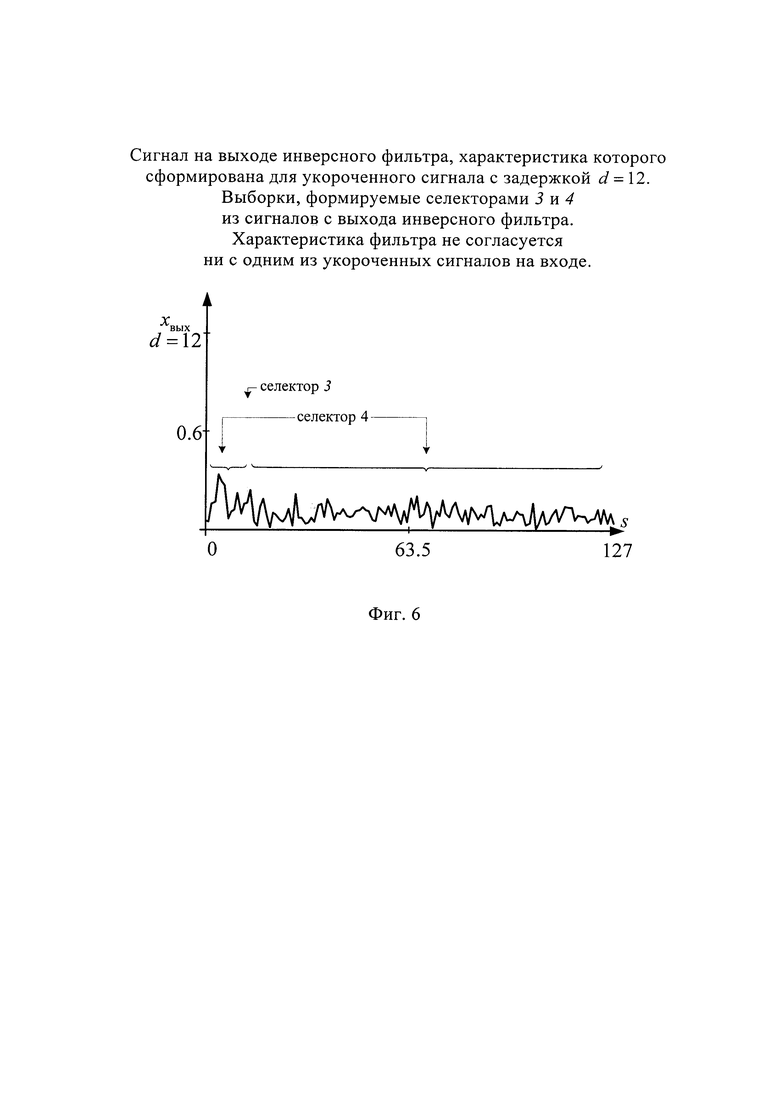
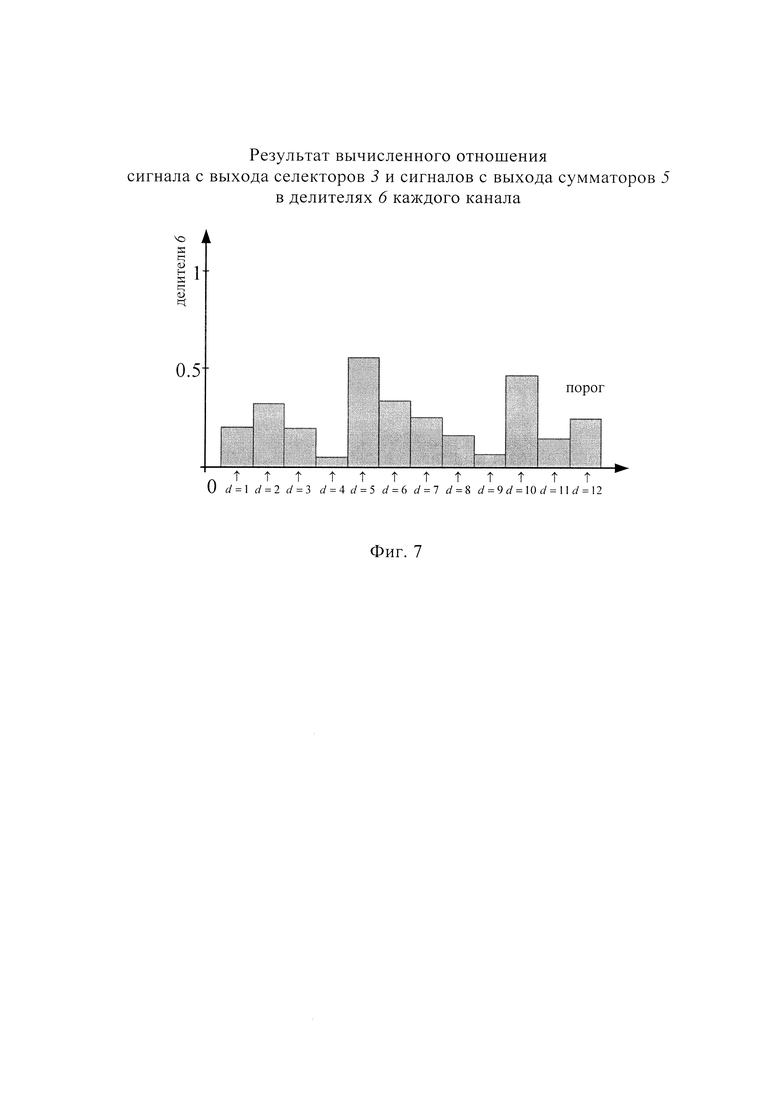
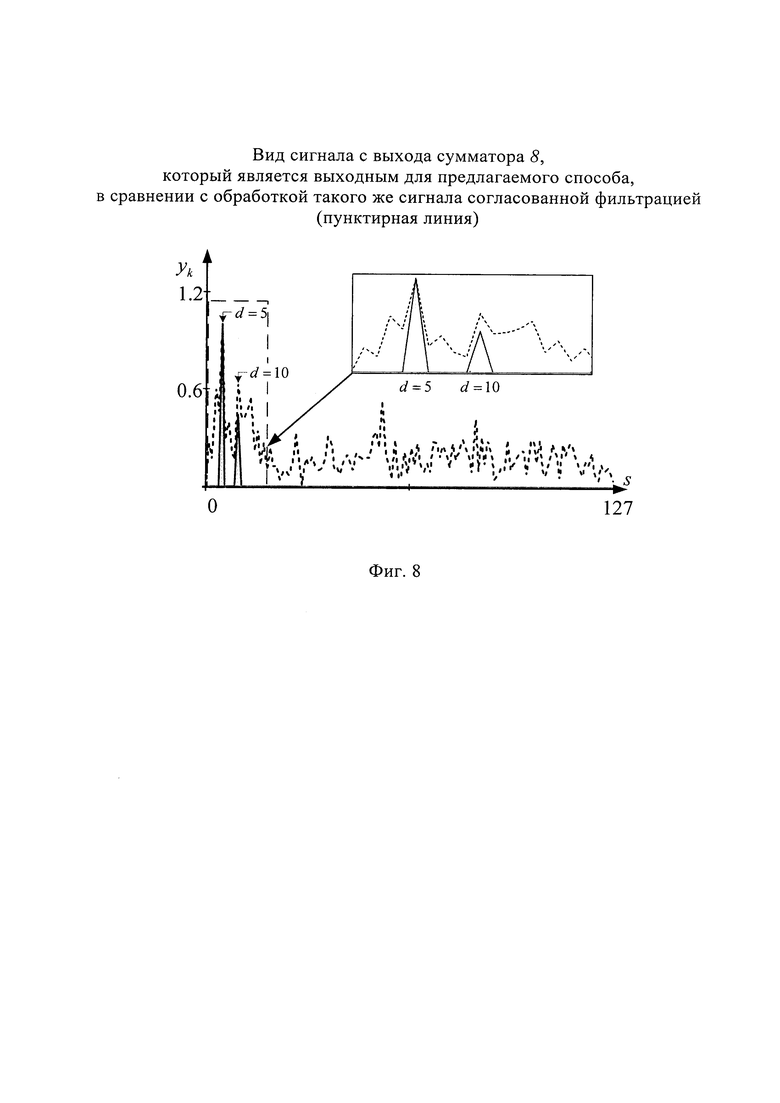
С входным сигналом проводиться распараллеливание для многоканальной обработки 1 в системе из S инверсных фильтров 2. В качестве примера на фиг. 3-6 проиллюстрирован сигнал на выходе ряда инверсных фильтров 2, характеристики которых сформированы для укороченных сигналов с задержками d=5 (фиг. 3), d=10 (фиг. 4) и d=0 (фиг. 5), d=12 (фиг. 6). При этом на фиг. 3, 4 показаны сигналы, характеристикикоторых согласуются с одним из укороченных сигналов на входе. На фиг. 5, 6 - характеристики которых не согласуются ни с одним из укороченных сигналов на входе. Также на фиг. 3-6 обозначены выборки, которые формируются в результате селектирования 3 и 4 из сигналов с выхода инверсных фильтров. Как видно из фиг. 3 - 6 в случае наличия в сигнальной смеси на входе инверсного фильтра укороченного сигнала, степень укорочения которого соответствует характеристике фильтра средняя сумма по модулю 5 из отсчетов выборки 4 будет меньше чем модуль отсчета из выборки 3. Результат отношения по модулю 6 отсчета из первой выборки 4 к средней сумме по модулю отсчетов из второй выборки 5 проиллюстрирован на фиг. 7. В результате пороговой обработки 7 порог р превышен для сигналов в тех каналах, характеристика которых согласуется с сигналами имеющими задержку d=5 и d=10, которые и участвуют в образовании суммарного сигнала 8. Суммарный сигнал 8 для рассматриваемого примера, который является результатом работы способа в сравнении с обработкой такого же сигнала способом согласованной фильтрации (пунктирная линия) проиллюстрирован на фиг.8.
В результате работы способа сформирован сигнал с нулевым уровнем боковых лепестков, вне зависимости от степени его укорачивания, что лучше, чем в уже известном фильтре радиолокационного сигнала (RU 1105002 U1, 20.11.2011, International Classificatory G0 1S 7/292, Фильтр подавления боковых лепестков сложного радиолокационного сигнала).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ КОМПЕНСАЦИИ ПОМЕХ ПРИ МОНОИМПУЛЬСНОМ АМПЛИТУДНОМ СУММАРНО-РАЗНОСТНОМ ПЕЛЕНГОВАНИИ И НАЛИЧИИ ОШИБОК КАЛИБРОВКИ ПРИЕМНЫХ КАНАЛОВ | 2011 |
|
RU2456631C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕЙСЯ ЦЕЛИ С РАЗЛИЧЕНИЕМ СКОРОСТНЫХ И МАНЕВРЕННЫХ ХАРАКТЕРИСТИК | 2015 |
|
RU2619056C2 |
| СПОСОБ ВНЕШНЕГО РАДИОЛОКАЦИОННОГО ВЫЯВЛЕНИЯ ФАКТА НАЛИЧИЯ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ ПОЛЕТА У ВОЗДУШНОГО ОБЪЕКТА ПО СТРУКТУРЕ ЕГО ИМПУЛЬСНОЙ ХАРАКТЕРИСТИКИ | 2014 |
|
RU2562060C1 |
| ВПЕРЕДСМОТРЯЩИЙ ГИДРОЛОКАТОР ГЛУБОКОВОДНОГО НОСИТЕЛЯ | 2019 |
|
RU2699938C1 |
| УСТРОЙСТВО ОБРАБОТКИ ПАРНОГО D-КОДА | 2020 |
|
RU2745843C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОПЕРЕЧНЫХ РАЗМЕРОВ РАДИОЛОКАЦИОННЫХ ОБЪЕКТОВ РЛС В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 1999 |
|
RU2150714C1 |
| СПОСОБ ПОСТРОЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ПРЯМОЛИНЕЙНО ЛЕТЯЩЕЙ ЦЕЛИ ПРИ МНОГОЧАСТОТНОМ УЗКОПОЛОСНОМ ЗОНДИРОВАНИИ | 1995 |
|
RU2099743C1 |
| Способ измерения дальности и радиальной скорости в РЛС с зондирующим составным псевдослучайным ЛЧМ импульсом | 2017 |
|
RU2688921C2 |
| Способ пространственно-временной адаптивной обработки сигналов в моноимпульсной корабельной радиолокационной станции с активной фазированной антенной решеткой | 2018 |
|
RU2735216C2 |
| ПРИЕМНИК ИМПУЛЬСНОГО СИГНАЛА | 2024 |
|
RU2835979C1 |
Изобретение относится к области радиотехники и может быть использовано в радиотехнических системах обнаружения с применением в качестве зондирующих импульсных кодофазоманипулированных (КФМ) сигналов. Техническим результатом является повышение вероятности обнаружения укороченного КФМ эхо-сигнала без увеличения времени обработки. Заявленный способ включает распараллеливание 1 временных отсчетов укороченного сигнала  для многоканальной обработки в системе из S инверсных фильтров 2. В каждом канале системы с сигналом с выхода инверсного фильтра 2 проводится селектирование для формирования выборок 3 и 4. Выборка 3 содержит временной отсчет отклика инверсного фильтра, в котором ожидается сигнал в случае, если степень его укорочения соответствует данному фильтру. Выборка 4 содержит прочие отсчеты отклика инверсного фильтра. Из отсчетов выборки 4 вычисляется их средняя по модулю сумма 5. Далее вычисляется отношение по модулю 6 отсчета из первой выборки 4 к средней сумме по модулю отсчетов из второй выборки 5. С результатом деления 6 выполняется пороговая обработка 7. Если в результате пороговой обработки 7 порог р превышен, то на выход данного канала системы подается сигнал из первой выборки 3, в противном случае с выхода канала поступает ноль. Выходные сигналы всех каналов суммируются и суммарный сигнал 8 является результатом работы способа. 8 ил.
для многоканальной обработки в системе из S инверсных фильтров 2. В каждом канале системы с сигналом с выхода инверсного фильтра 2 проводится селектирование для формирования выборок 3 и 4. Выборка 3 содержит временной отсчет отклика инверсного фильтра, в котором ожидается сигнал в случае, если степень его укорочения соответствует данному фильтру. Выборка 4 содержит прочие отсчеты отклика инверсного фильтра. Из отсчетов выборки 4 вычисляется их средняя по модулю сумма 5. Далее вычисляется отношение по модулю 6 отсчета из первой выборки 4 к средней сумме по модулю отсчетов из второй выборки 5. С результатом деления 6 выполняется пороговая обработка 7. Если в результате пороговой обработки 7 порог р превышен, то на выход данного канала системы подается сигнал из первой выборки 3, в противном случае с выхода канала поступает ноль. Выходные сигналы всех каналов суммируются и суммарный сигнал 8 является результатом работы способа. 8 ил.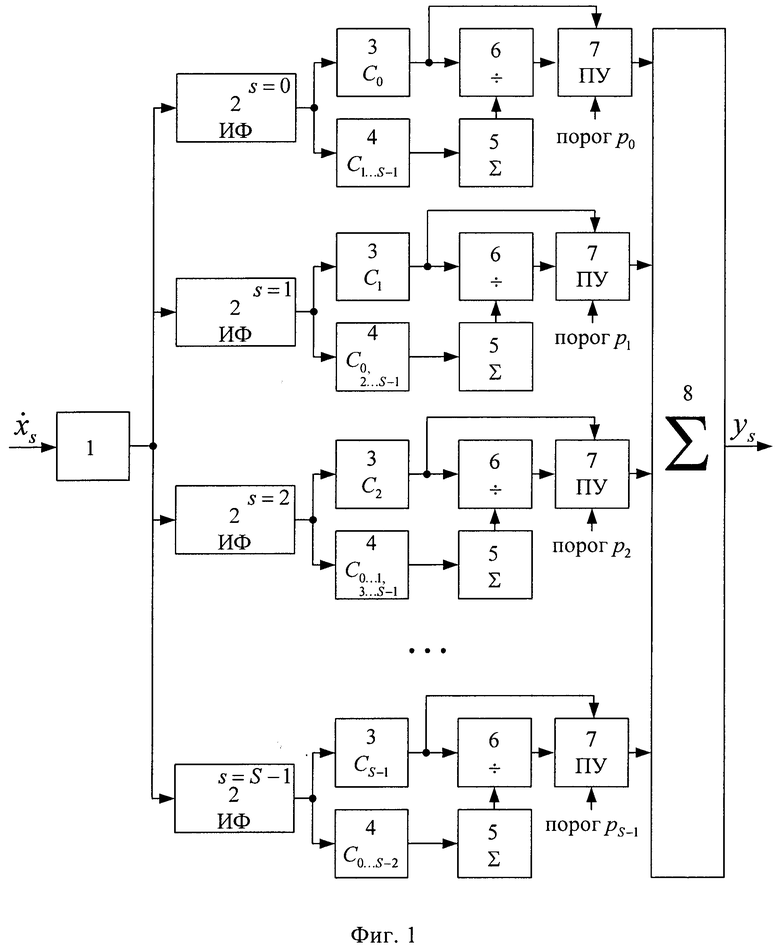
Способ многоканальной инверсной фильтрации импульсных кодофазоманипулированных (КФМ) эхо-сигналов, заключающийся в том, что принимаемый сигнал обрабатывается параллельно многоканальной системой из S инверсных фильтров, характеристика каждого инверсного фильтра системы рассчитана для опорного сигнала, укороченного на количество дискрет, соответствующее номеру фильтра, с выхода каждого инверсного фильтра сигнал селектируется, в результате чего формируется две выборки, первая выборка содержит временной отсчет отклика инверсного фильтра, в котором ожидается сигнал в случае, если степень его укорочения соответствует данному фильтру, вторая выборка содержит прочие отсчеты отклика инверсного фильтра, из второй выборки вычисляется средняя сумма по модулю ее отсчетов, далее вычисляется отношение по модулю отсчета из первой выборки к средней сумме по модулю отсчетов из второй выборки, с результатом деления выполняется пороговая обработка, если в результате пороговой обработки порог превышен, то на выход данного канала системы подается сигнал из первой выборки, в противном случае с выхода канала поступает ноль, выходные сигналы всех каналов суммируются и сформированный суммарный укороченный КФМ сигнал со скомпенсированными боковыми лепестками является результатом работы способа.
| Передвижная буровая каретка | 1957 |
|
SU110502A1 |
| Способ адаптивного обеспечения высокой разрешающей способности радиолокатора по дальности за счет оценивания информационного диапазона параметра регуляризации инверсного фильтра | 2021 |
|
RU2785383C1 |
| СЬЯНОВ В.А | |||
| Подавление боковых лепестков составных фазокодомодулированных сигналов на основе кодов Баркера // Изв | |||
| вузов России | |||
| Радиоэлектроника | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Сc | |||
| Веникодробильный станок | 1921 |
|
SU53A1 |
| Устройство обработки фазоманипулированных радиолокационных сигналов | 2016 |
|
RU2628405C1 |
| СПОСОБ ИМПУЛЬСНОЙ РАДИОЛОКАЦИИ СИСТЕМОЙ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 1996 |
|
RU2107926C1 |
| US 4095225 A, 13.06.1978 | |||
| US 5070337 A, 03.12.1991 | |||
| EP 1521097 B1, | |||

