CD 00
1-1зобретение относятся к области трансга ргного NiamHHocrpoeHwt, а именно к подвоскпм гусенич ых транспортных средств..
Известен сзюсрб изменения часготы .колеб-nHmi корпуса гусен яного транспортного средства, при котором блокируют подвеску в зазксимости от направления, скорости, ycKopeHtiii колебаний и flpjrrHX параметров fl 3.
При нс11ол1: зованйн такого способа снижается средняя скорость движения транспортного средства блокирювки зтадвескй.
Известен также способ изменения чаототы копебан.ий корпуса гусеничного транспортного средства, связанного подвеской с гусеничным движителем, при котором замеряют параметры колебаний корпуса, cpaBHiffiaioT их с заданными величинами, преобразуют в управляющий сигнал и по нему характеристику подвески 2 |
При таком способе не обеспечивается достаточная плавность хода транспортного средства я снижается его скорость изза резкого включения блокирующего подвеску меканизма по управляющему сигналу.
Целью тьзобрегешш является повышени средней скорости движения и плавности хода транспортнего средства.
Это достгагается тем, что в способе изменения частоты колебаний корпуса гусешмного транспортного средства, связанного подвеской с гусеничным движителем,, ахрн котором замеряют параметры колебаний корпуса, сравнивают иХ с задан№мн величинами, преобразуют в управляющий сигнал и по нему меняют карактеристнку поавески путем «изменения атяження гусениц по управляющему сигналу.
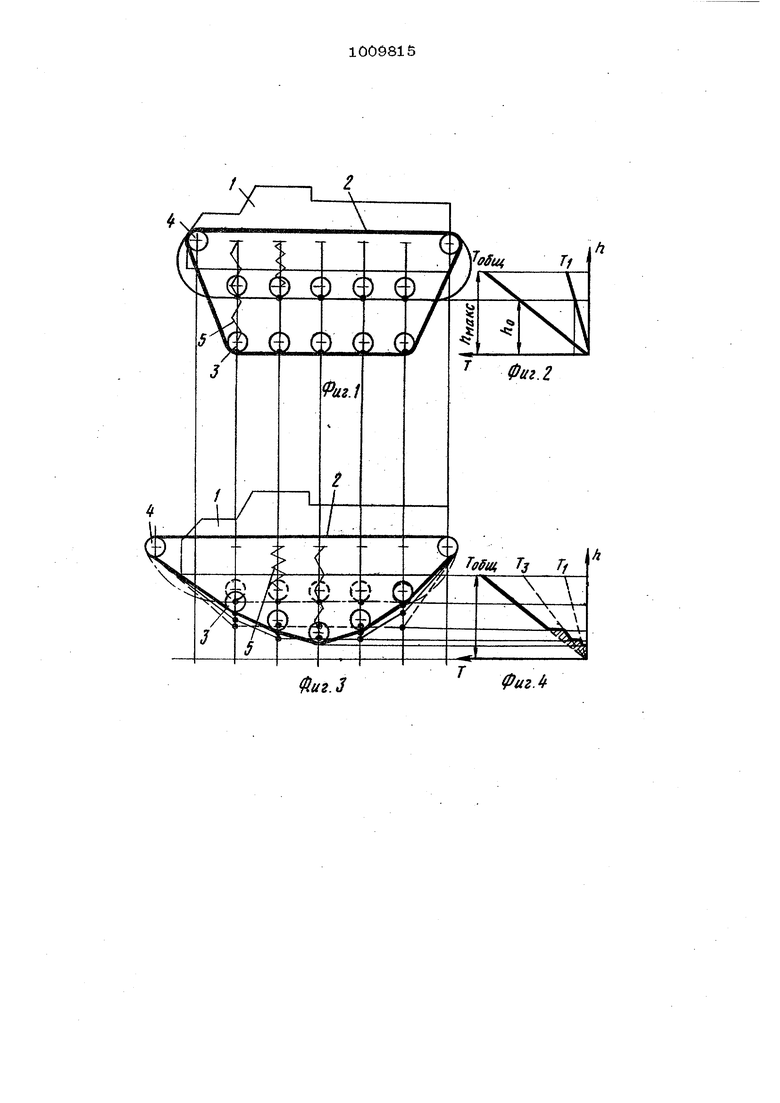
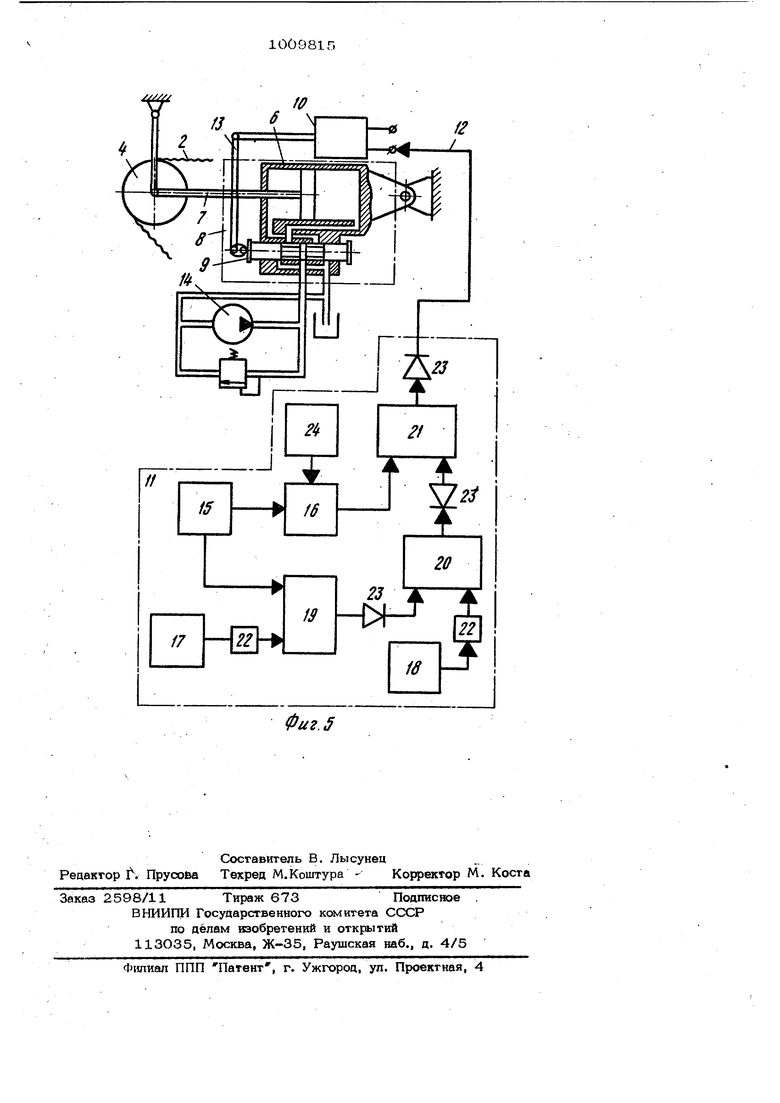
На фнг, 1 показана схема гусжниниого гранспортного средства со слабо натянутой гусеницей; на фиг. 2 - характеристика такой подвески; на фнг. 3 схема транспортного средства с сильно натянутой гусеницей; на фиг. 4 - ее . характеристика; на фиг. 5 - схема замера колебаний, выработка сигнала и управления штяжением гусениц. Способ поясняется на примере гусе ЯИЧНОГО транспорт1юго средства, корпус 1 которого связан с гусеничным движителем , несушим гусеншу 2, опорные колеса (катки) 3 и натяжное колесо 4 посредством подвески 5, С колессжд 4 взаимодействует силовой гидравлический
циливдр 6 через шток 7. Цилиндр 6 включен в гидроусилитель 8 с регулируемым распределителем 9, выполненный по схеме однокаскадного позиционного усилителя с управляющим механизмом 10, получающим ot преобразователя 11 управляющий сигнал 12. Управляющий механизм 1О связан с регулируемым paoi пределителем 9 коромыслом 13, связанным также со штоком 7, чем обеспечивается обратная связь по перемещению в гвдроусилителе 8. Гидроусилитель связан с источником 14 давления.
Для формирования управляющего силнала в преобразователе 11 устанавливается датчик 15 измерения угла колебаний корпуса 1 и датчик 16 замера угловых скоростей, датчики 17 и 18 соответственно заданных углов и скоростей, блоки 19 и 20 для сравнения заданный и измеренных параметров, блок 21 для выработки управляющего сигнала 12. В схеме применены инверторы 22 и диоды 23, а также отсчетчик 24 времени.
Изменение частоты колебаний корпуса гусеничного транспортного средства осуществляется следующим способом.
Датчик 15 измеряет угол наклона корпуса 1 и вырабатывает сигнал, пропорциональный величине утла, далее сигнал дифференцируется в сигнал, пропорционалный угловой скорости в датчике 16 замера угловой скорости, и подается в блок 21. От датчика 15 сигнал, пропорциональный величине угла, подается также в блок 19; где сравнивается по величине и знаку с сигналом утла, поступа.ющим от датчика 17 заданного угла че1рез инвертор 22,. меняющий знак сигнала на противоположный. Суммарный сигнал рассогласования из блока 19 попадает на диод 23, который пропускает сигналы положительного знака и не пропускает сигналы отрицательные по знаку, и поступает в блок 20, rrte сравнивается с поступающим от датчика 18 через инвертор 22 заданным сигналом угловой скорости. Суммарный сигнал рассогласования из блока 20 через диод 23, пропускающий только сигналы отрицательного знака, nocjynaeT в блок 21, где сравнивается с поступивщим в него сигналом от датчика 16 угловой скорости, и через диод 23, пропускающий только сигналы положительного знака по цепи управляющего сигнала 12, поступает на вход управпяющего механизма 10, перемещающего натяжное колесо и тем самым изменяющего натяжение гусениц. Измене-
ние натяжения гусениц приводит к воэникновению дополнительной рассеивающей силы в гусеничном движителе за счет увеличения трения в шарнирах гусейичной цепи, а также приводит к изменению жест-5 кости подвески, связывающей отдельные опорные колеса с корпусом. Если, гусен да 2 не натянута и ходовая часть над землей, Катки 3 опускаются на величину максимального хода . фиг. 2). ю При опускании машины катки 3 проходят путь hjj и уравновешивают корпус 1, так как суммарное усилие подвески 5 соответству ет массе корпуса 1. Зависимооти хода катков f от сипы сжатия подвео- $ ки Т в этом случае линейны Т - характеристика единичной подвески, т.е подвески одного катка, а суммарная характеристика всей подведи. Если гусеница 2 натянута (фиг. 3) то характерис- JQ тика всей подвески (фиг. 4) становится ломаной линией, так как прв опускании машины, если число катков нечетное, сначала работает подоска одного катка (Т), затем трех (Tj),далее пяти (.), суммарную характеристику подвески ступенчато. Если число катков четное, то сначала работают два катка, затем четы- ре, а потом шесть, но суммарная характеристика также имеет ступенчатый вид. JQ В процессе движения (сэмеряют параметры колебаний подрессоренной массь корпуса, сравнивают их с ааданшлми величинами и преобразуют их в управляющий сипнал, по крторому изменяют явтяжение
гусениц. Изменение натяжения гусениц приводит к изменению жесткости подвеоки, чем гасятся колебания корпуса. Особенно эффективен описанный способ для гашения продольных резонансных колеба НИИ корпуса на .трассах движения о CBRJH соидальным повторяющимся профилем.
Описанный .способ взменешш частоты колебаний корпуса гусеничного транспорт
1ного средства позволяет обеспечит-ь повышена плавность хода машнвы при .движении с максимально возможвами тю запасу мощности двигателя скоросгямв по дорогам в местности. Устройство см ет малую массу в неболыпве габариты. Удобно в просто в обслужвваввв.
Перводвческое пробвванве лодвескв сводится к минимуму или вовсе отсутствует. Обеспечвваются малые звачеввя ускорений, передаваемых на корпус машвны, в сочетаввв с высокой ввтевсвв ностыо гашенвя колебаввй..
Кроме того, обе шечввается автоматическое управление всей свстемой noft рессорвванвя в заввсвмоств от дорожных условий в незаввсвмо от твтт подвескв. Облегчаются условвй боты водвтеля. Все это в совокупвоств првводвт к увелвчению средней ско|ж ств движения гусеничных травсвортвых средств в позволяет вспользовать этот способ ва гусеничных машввах, вмеющвх гвдравлический мехаввзм ватяженвя гусеввп, что расшврвт функивв механизма ватяжеввя без существеввых. переделок.
fO
i I
--4-
Фи2.5
f2
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения статических нагрузок на опорные катки гусеничной машины | 1983 |
|
SU1137370A1 |
| Устройство для натяжения цепи гусеничного движителя транспортного средства с балансирной подвеской опорных катков | 1980 |
|
SU1066876A1 |
| Устройство для обеспечения работоспособности ходовой части гусеничной машины | 2015 |
|
RU2620180C1 |
| СПОСОБ И СИСТЕМА ПОДРЕССОРИВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2548823C2 |
| Подвеска лесного гусеничного трактора | 1988 |
|
SU1525031A1 |
| Транспортное средство | 1978 |
|
SU766946A1 |
| Роботизированная сельскохозяйственная платформа | 2024 |
|
RU2834465C1 |
| Ходовая часть гусеничной машины | 1981 |
|
SU1011436A1 |
| Транспортная система | 1981 |
|
SU988632A1 |
СПОСЮБ ИЗМЕНЕНИЯ ЧАСТОТЫ КОЛЕБАНИЙ КОРПУСА ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА, связанного подвеской с гусевЕНВЫм аввжвтелам(, при которся замеряют параметры колебаний , сравнивают их с эаданЕЫМн величинами, преобразуют в управляющий сигнал и по нему меняют характеристику поовески, отличающийся тем, что, с целью повышения средней скорости дздакения и плавности хода трмаюртного средства , характеристику подвески меняют путем изменения натяжения гусенвп движителя по управляющему сигналу.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Раздвижной паровозный золотник с подвижными по его скалке поршнями между упорными шайбами | 1922 |
|
SU148A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| МЕХАНИЗМ ДИСТАНЦИОННОГО ПЕРЕЗАРЯЖАНИЯ АВТОМАТИЧЕСКОГО ГРАНАТОМЁТА | 2003 |
|
RU2247915C1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
