О)
Ф
Изобретение относится к горной промышленности, а именно к устройствам контроля полох ения гибких трубопроводов систем гидротранспортировйния,
Известна система управления горно машиной, содержащая лебедку с реверсивным электродвигателем, регулятор, датчик натяжения троса, которым лебедка соединена с подвижной горной машиной TI.
Однако данная система предназначена для поддержания скорости движения горной машины и предотвращения разрывов троса и не может быть в таком виде применена для управления горной ма шиной с гидротранспортом полезного ископаемого, для обеспечения скорос:ти ее движения и предотвращения разрывов гидравлических трубопроводов.
Наиболее близкой к изобретению является система управления горной машиной с гидротранспортом полезного ископаемого, включающая самодвижущийся насосный агрегат, трубопроводы секции которых закреплены на колесных тележках, и напорный насос 2.
Однако в известной системе не обеспечивается автоматическое перемещение трубопроводов и не контролируется их натяжение. Это снижает производительность горной машины и надежность трубопроводов.
Цель изобретения - повышение производительности горной машины и надежности трубопроводов.
Поставленная цель достигается тем что система снабжена подвижным и неподви иными повороти1МИ узлами, натях ными тросами поворотных узлов и датчиками натяжения тросов, лебедкой с реверсивным электродвигателем, анкерами и регулятором натяжения, к вхбдам которого подключены выходы датчиков натяжения, а выход регулятора соединен с реверсивным электродвигателем лебедки, причем неподвижные noBOpoTHbte узлы при помощи тросов через датчики натяжения прикреплены к соответствующим анкерам, а подвижный поворотный узел подвешен при помощи троса через датчик натя)ения к лебедke.
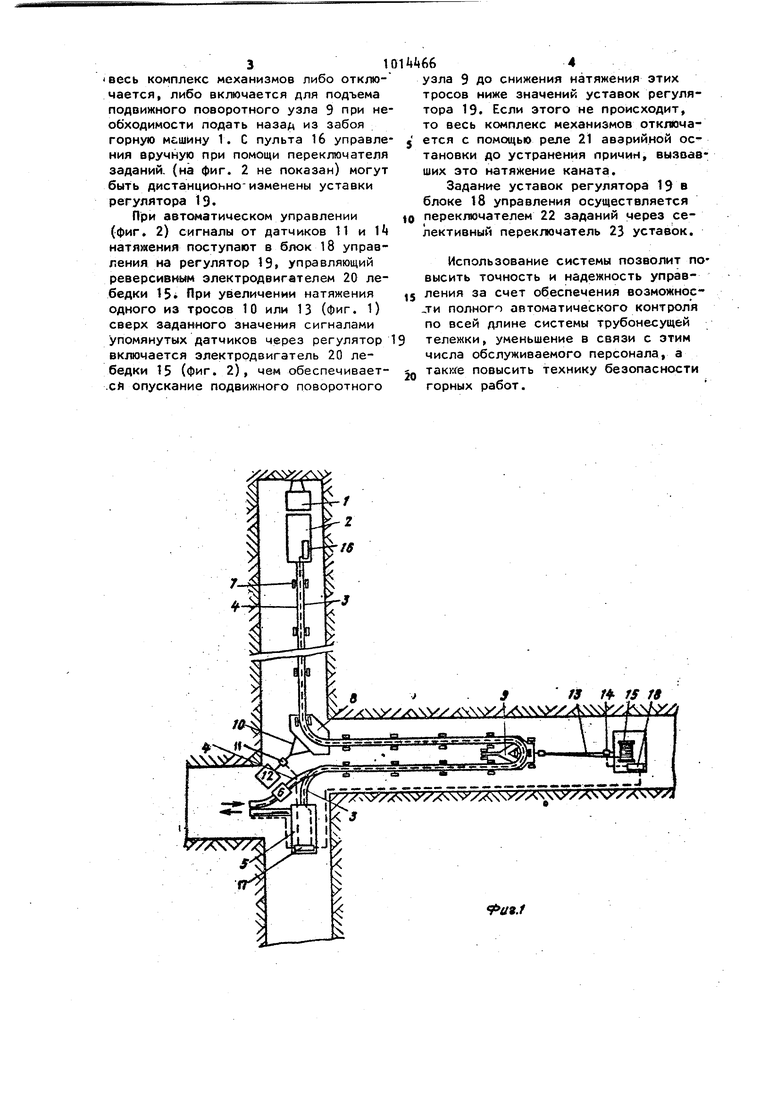
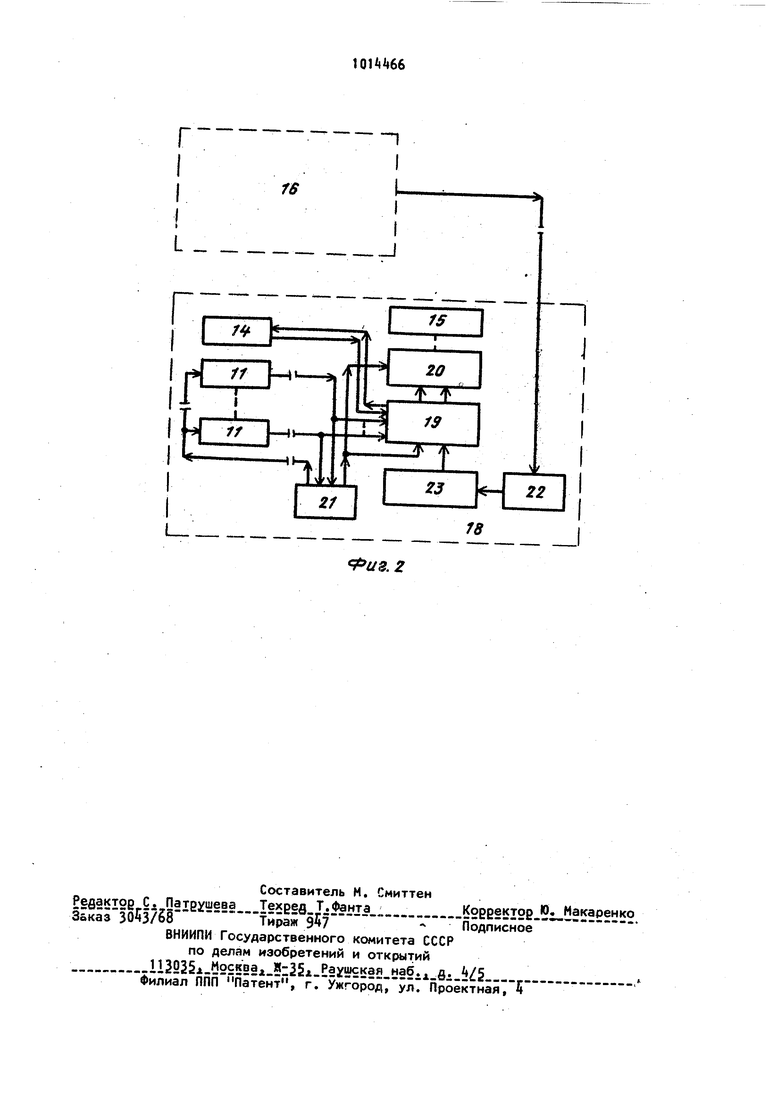
На фиг. 1 приведена общая схема всей системы; на фиг. 2 - схема электрической части системы.
Уголь, добытый горной машиной 1 (фиг. 1), поступает к самодвижущемуся насосному агрегату 2, который трубопроводами 3 и 4 соединен соответственно с напорным насосом 5 и соединительным узлом 6. По трубопроводу 3 поступает осветленная вода, а по трубопроводу 4 - пульпа. Трубопроводы закреплены на колесных тележках 7 проходящих через неподвижные поворотные узлы 8 (на фиг.1 показан только один такой узел, но их может быть несколько) и подвижный поворотный узел 9.
Каждый отдельный неподвижный поворотный узел 8 при помощи натяжного троса 10 через датчик 11 натяжения прикреплен к анкеру 12.
5 - Подвижный поворотный узел 9 подвешен при помощи троса 13 через датчик 1t натяжения к лебедке 15.
Пульт 16 управления самодвик ущегося насосного агрегата, датчики 11 натяжения через распределительную коробку 17 соединены с блоком 18 управления , к которому подключен также датчик 14 натяжения.
В блоке 18 управления (фиг. 2) размещен регулятор 19 к входам которого подключены выходы датчиков 11 и 14 натяжения. К выходу регулятора 19 подключен реверсивный электродвигатель 20 лебедки 15. Датчики 11 натяжения соQ единены с реле 21 аварийной остановки, подключенным к регулятору 19 и реверсивному электродвигателю 20.
Пульт 16 управления соединен с переключателем 22 заданий, подключенным к селективному переключателю 23 уставок, а свою очередь подключенному к регулятору 19.
Система работает следующим образом. По мере подвигания горней машины 1 (фиг. 1) вслед за ней перемещается
самодвижущийся насосный агрегат 2. За счет опускания подвижного поворотного узла 9 обеспечивается своевременная подача перемещающихся совместно с насосным агрегатом 7 трубопроводов 3-4.
Опускание (а при подготовке к следующему циклу передвижки - подъем) подвижного поворотного узла 9 осуществляется при помощи лебедки 15.
Для предотвращения разрывов трубопроводов 3-4 и звеньев колесных теле ек 7 в процессе их перемещения на подвижном 9 и неподвижном поворотных узлах 8 контролируются натяжения со тветствующих тросов 10 и 13.
Для этого на пульте 16 управления оператором выбирается один из режимов работь : ручное или автоматическое управление« При ручном управлении. 31 весь комплекс механизмов либо отключается, либо включается для подъема подвижного поворотного узла 9 при не обходимости подать назад из забоя горную мгшину 1. С пульта 16 управле ния вручную при помощи переключателя заданий, (на фиг. 2 не показан) могут быть дистанционно-изменены уставки регулятора 19. При автоматическом управлении (фиг. 2) сигналы от датчиков 11 и I натянения поступают в блок 18 управления на регулятор 19, управляющий реверсивным электродвигателем 20 лебедки 15 При увеличении натяжения одного из тросов 10 или 13 (фиг. 1) сверх заданного значения сигналами Упомянутых датчиков через регулятор включается электродвигатель 20 лебедки 15 (фиг. 2), чем обеспечивает.сй опускание подвижного поворотного 1 664 узла 9 до снижения натяжения этих тросов ниже значений уставок регулятора 19. Если этого не происходит, то весь комплекс механизмов отключается с помощью реле 21 аварийной остановки до устранения причин, вызвав ших это натяжение каната. Задание уставок регулятора 19 в блоке 18 управления осуществляется переключателем 22 заданий через селективный переключатель 23 уставок. Использование системы позволит повысить точность и надежность управления за счет обеспечения возможности полного автоматического контроля по всей длине системы трубонесущей тележки, уменьшение в связи с этим числа обслуживаемого персонала, а повысить технику безопасности горных работ.
.ЧХХ.
/ IS 19 ЛХх
x/ xs xxxч vv x чX v vv vvANvv;
.f
as. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Многократная телеграфная ретрансмиссия | 1939 |
|
SU57732A1 |
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
| Приспособление к индикатору для определения момента вспышки в двигателях | 1925 |
|
SU1969A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫКЛЮЧАТЕЛЕМ | 1932 |
|
SU32605A1 |
| АВТОМАТ ДЛЯ ПУСКА В ХОД ПОРШНЕВОЙ МАШИНЫ | 1920 |
|
SU299A1 |
| Двухтактный двигатель внутреннего горения | 1924 |
|
SU1966A1 |
