щения секций на-выходе из клети, третий и четвертый выходы первого дешифратора через первый элемент ИЛИ и четвертый инвертор соединены с третьим входом первого ключа, выходы фотоэлектрических датчиков секций, расположенных на входе в клеть, соединены с входами второго дешифратора.
первый и второй выходы которого соединены с входами блока управления двигателем перемещения секций на входе в клеть, третий и четвертый выходы второго дешифратора через второй элемент ИЛИ и пятый инвертор соединены с третьим входом третьего ключа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического центрирования полосы при прокатке | 1980 |
|
SU908450A1 |
| Устройство для автоматического центрирования полосы при непрерывной прокатке | 1980 |
|
SU910258A1 |
| Устройство для регулирования формы полосы при непрерывной прокатке | 1990 |
|
SU1685566A1 |
| Устройство для регулирования толщины при прокатке концов полос | 1983 |
|
SU1135512A2 |
| Устройство для регулирования формы полосы в процессе непрерывной прокатки | 1990 |
|
SU1729644A1 |
| Устройство автоматического управления механизмом перемещения нажимных винтов реверсивных станов горячей прокатки | 1984 |
|
SU1186303A1 |
| Устройство для автоматического регулирования межвалкового зазора при прокатке полос | 1981 |
|
SU1007773A1 |
| Устройство для регулирования толщины полосы на входе непрерывного прокатного стана | 1979 |
|
SU900903A1 |
| Устройство для измерения межклетевого натяжения проката | 1985 |
|
SU1247114A1 |
| Способ управления установкой межклетевого охлаждения полосы в процессе непрерывной горячей прокатки и устройство для его реализации | 1980 |
|
SU1011289A1 |
УСТРОЙСТВО ДЛЯ МТОМАТИЧЕСКОГО ЦЕШТРИРОВАНИЯ ПОЛОСЫ ПРИ ПРОКАТКЕ, содержащее четное число фотоэлектрических датчиков, расположенных на входе я выходе из клети, в каждой группе фотоэлектрические датчики асположены cи 4мeтpичнo относительно-оси прокатки и с равным шагомна полную длину валка параллельно его оси, управления приводами соответственно левого и правого нажимных винтов, датчики давления соответственно под правым и левым нажимными винтами, датчик наличия полосы в валках предыдущей клети, три блока вычитания, три ключа, три инвертсчра и блок сложения, причем выходы фотоэлектрических датчиков, расположенных на выходе иэ клети, соединены с входами первого блока вычитания, выход которого через первый вход первого ключа соединен с первым входом блока сложения, первый выход блока сложения соединен с блоком управления приводом :правого нажимного винта непосредственно, а с блоком управления приводом левого нажимного винта - через первый инвертор, второй выход блока сложения соединен через первый инверто) с входом второго ключа второй вход которого соединен с выходом второго блока вычитания, выход второго ключа соединен с блоком управления приводом правого нажимного винта непосредственно, а с блоком управления приводом левого нажимного винта через второй инвертор, первый и второй входы второго блока вычитания соединены с выходами соответственно датчиков давления под правым и левым, нажимными винтами, выходы фотоэлектрических датчиков, расположенных на входе в клеть, соединены с входами третьего блока вычитания, выход которого соединен с первым входом третьего ключа, выход третьего ключа соединен с вторым I входом блока сложения, первый и второй выходы датчика наличия полосы (Л в валках предыдущей клети соединены соответственно, с вторым входом пер.вого ключами через третий инвертор с вторым входом третьего ключа, о тли чающее с я .тем, что, с целью улучшения качества прокатываемых полос путем повышения точности их центрирования, а также повышения точности при .определении направления со оо и величины смещения переднего и заднего концов полосы при прокатке, оно дополнительно содержит пш две 1C секции соответственно на входе и вы4ii ходе из клети, расположенные симметрично оси прокатки, содерж.ащие каждая два фотоэлектрических датчика и установленные с возможностью возвратнрпоступательного движения вдоль оси валка в плоскости, параллельной . плос1 ости прокатки, два блока улравления двигателями перемещения секций, два дешифратора, два элемента ИЛИ, четвертый и пятый инверторы, причем выходы фотоэлектрических датчиков секций, расположенных на выходе из клети, соединены с входами первого дешифратора, первый и второй выходы которого соединены с входами блока управления двигателем переме
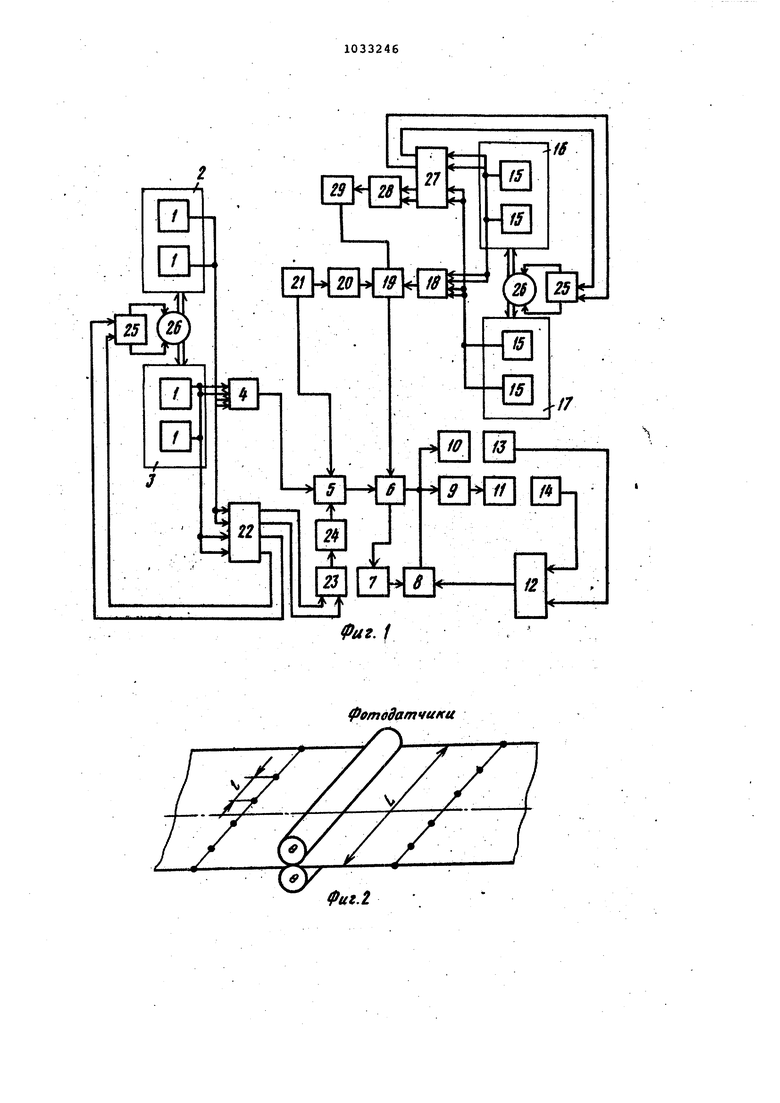
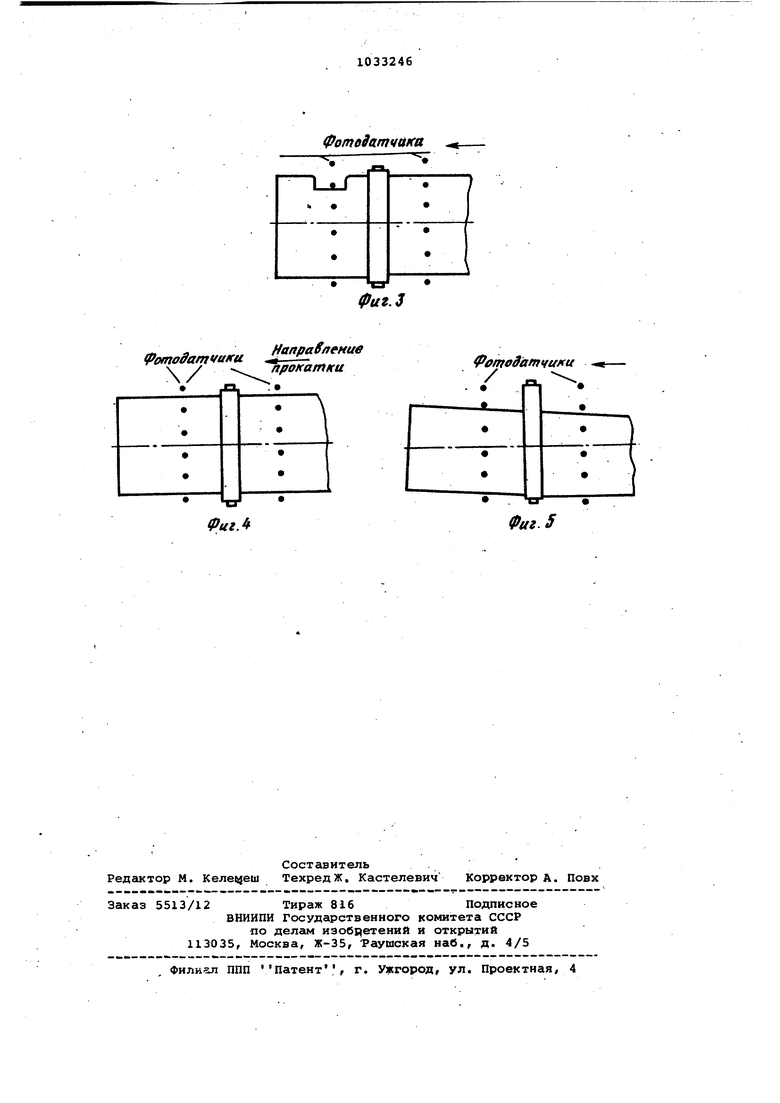
Изобретение относится к автоматизации прокатного производства, в частности к настройке прокатных станов непосредственно в процессе их работы, и может быть использовано на прерывных полосовых станах. Известно устройство стабилизации профиля полосы, содержсццее два датчика удельных натяжений, расположен.ных на выходе из клети у кромок полосы справа и слева от оси прокатки системы управления приводами нажимных винтов, систему противоизгиба рабочих валков, систему дополнительного изгиба рабочих вгшков с датчиками давления, электрогидропреобразователи, вычитающие блоки и инверторы С1 . Однако отсутствие на входе в клеть и выходе из клети датчиков контроля положения полосы приводит к ошибкам в определении направления и величины смещения переднего и зад него концов полосы в горизонтальной плоскости относительно оси прокатки и к ошибкам регулирования, когда вытяжки левой и правой кромок поло , сы различны, а следовательно, различны и усилия прокатки под левым и правым нажимным винтами. Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство для автоматического центрирования полосы при прокатке, содержащее чет ное число фотоэлектрических датчиков расположенных на входе и выходе из клети, в каждой группе фотоэлектрические датчики расположены симметрично относительно оси прокатки и с равным шагом на полную длину валка параллельно его оси, системы управления приводами соответственно лево го и правого нажимнйх винтов, датчи ки давления соответственно под правым и левым нажимными винтами, датчи наличия полосы в валках предьщущей клети, три блока вычитания, три клю ча, два элемента НЕ блок сложения и инвертор, причем выходы фотоэлект риГеских датчиков, расположенных нд выходе из клети, соединены с входами первого блока вычитания, выход которого через первый вход первого ключа соединен с первым входом блока сложения, первый выход блока сложения соединен с системой управления приводом правого нажимного винта непосредственно, а с системой управления приводом левого нажимного винта через инвертор, второй выход блока сложения соединен с входом первого элемента НЕ, выход которого соединен с первьлм входом второго ключа, Второй вход второго ключа соединен с выходом второго блока вычитания, выход второго ключа соединен с системой управления приводом правого нажимного винта непосредственно, а с системой управлен1 я приводом левого нажимного винта - через инвертор, первый и второй входы второго блока вычитания соединены с выходами соот ветственно датчиков давления под правым и левым нажимными винтами,выходы фотоэлектрических датчиков,расположенных на входе в клеть, соединены со входами третьего блока вычитания , выход которого соединен с первым входом третьего ключа, выход третьего ключа соединен со вторым входом блока сложения, первый и второй выходы датчика наличия полосы в валках предыдущей клети соединен соответственно со вторым входом первого ключа и через второй элемент НЕ со вторым входом третьего ключа 21. f Недостатком данного устройства является невысокая точность при определении, направления и величины смещения переднего и заднего концов полосы, обусловленная принятой жесткой схемой расстановки фотоэлектрических датчиков и логикой работы устройства, 41ри такой расстановке фотоэлектрических датчиков точность центрирования полосы определяется расстоянием между оптическими осями двух рядом расположенных фотоэлектрических датчиков. Погрешность при определении величины смещения перед-. него и заднего концов подосы не больше половины этого расстояния и 2 где L - длина рабочих валков, мм; К « количество фотоэлектрически датчиков одной группы, т.е расположенных на входе или выходе из клети. Например, при схеме с шестью фотоэлектрическими датчиками в одной группе и при длине валков1,г2000 мм погрешность определяется неравенств ( мм. Учитывая современные требования по точности центрирования полос, в соответствии с которыми Л находится в пределах 10 мм, ясно, что такая погрешность является недопустимой. Дальнейшее увеличение количества датчиков является нерациональным и невозможным в случае использозания например, фотоэлектрических датчико типа ФРСУ (наиболее часто применяемого в металлургии).. Кроме этого, жесткая симме ричная схема расположения фотоэлект рических датчиков и предложенная ло гика работы устройства не позволяют выявлять дефекты переднего и заднег концов полосы типа одностороннего .сужения и расширения, часто встреча щиеся именно на концах полосы. При Нсшичии этих дефектов определение направления и величины смещения производится с ошибкой. Цель изобретения - улучшение качества прокатываемых полос путем :повышения точности их центрирования а также повышение -точности при опре делении направления и величины смещения переднего и заднего концов полосы при прокатке. Поставленная цель достигается тем, что устройство для автоматичес кого центрирования полосы при прока ке, содержащее четное число фотоэлектрических датчиков/ расположенных на входе и выходе из клети, в каждой группе фотоэлектрические дат чики расположены симметрично относи тельно оси прокатки и с равным шаго на полную длину валка параллельно его оси, блоки управления приводами соответственно левого и правого нажимных винтов, датчики давления соответственно под пЬавЕлм и левым нажимными винтами, датчик/наличия полосы в валках предыдущей клети, три блока вычитания, три ключа, три инвертора, блок сложения/ причем, выходы фотоэлектрических датчиков, расположенных на выходе из клети, ;соединены с входами первого блока вычитания, выход которого через пер вый вход первого ключа соединен с .первым входом блока сложения первый выход блока .сложения соединен с бло;ком управления приводом правого нажимного винта непосредственно, а с блоком управления приводом левого нажимного винта через инвертор, второй выход блока сложения соединен через первый инверсор с первым входом второго ключа, второй вход которого соединен с выходом второго яблока вычитания, выход второго ключа соединен с блоком управления приводом правого нажимного винта непосредственно, а с блоком управления при.водом левого нажимного винта- через орой инвертор, первый и второй входы второго блока вычитания соединены с выходами соответственно датчиков давления под правым и левым нажимными винтами, выходы фотоэлектрических датчиков , расположенных на входе в клеть, соединены с. входами третьего блока вычитания, выход которого соединен с первьм входом третьего ключа, выход третвего ключа соединен с вторым входом блока сложения, первый и второй выходы датчика наличия полосы в валках предьщущей клети соединены соответсТ венно с вторым входом первого ключа и через третий инвертор с вторым входом третьего ключа, дополнительно содержит по две секции соответственно на входе и выходе из клети, расположенные симметрично относительно ocil прокатки, содержащие каждая два фотоэлектрических датчика и установи ленные с возможностью воэвратнопоступательного движения вдоль оси |валка в плоскости, параллельной плоскости прокатки, два блока управ:Ления двигателями перемещения секций, два дешифратора, два элемента HiOHf четвертый и пятый инверторы, пр11чем выходы фотоэлектрических датчиков .секций, расположенных на выходе из клети, соединены с входами первого дешифратора, первый и второй выходы которого соединены с входами блока управления двигателем перемещения секций на.выходе из кпети., третий и четвертый выходы первого дешифратора ч&реэ первый элемент ИЛИ и четвертый инвертор соединены с третьим входом первого ключа, выходы фотоэлектрических датчиков секций, расположенных на входе в клеть, соединены с входами второго дешифратора, первый и вФорой выходы которого соединены с входами блока управления даи1 ателем перемещения секций на входе в клеть, третий и четвертый выходы второго дешифратора через второй элемент ИЛИ и пятый инвертор соединены с третьим входом третьего ключа. На фиг.1 представлена функциональная схема предложенного устройства; на фиг.2 - схема расположения фото-J электрических датчиков на входе и выходе из клети; на фиг. 3, 4 и 5 варианты положения полосы относител но оси прокатки . Устройство для автоматического центрирования полосы при прокатке содержит фотоэлектрические датчики I, расположенные на выходе из клети и объединенные в подвижные секции 2 к 3, первый -блок 4 вычитания, пер вый ключ5/ блок б сложения,- первый инвертор 7, второй ключ 8, второй инвертор 9, блоки. 10 и 11 управления приводами соответственно правог и левого нажимных винтов, второй блок 12 вычитания, датчики 13 и 14 давления соответственно под правым и левым нажимнымивинтами, фотоэлек рические датчики 15, расположенные на входе в клеть и объединенные- в подвижные секции 16 и 17, третий . блок 18 вычитания, третийключ 19, .третий инвертор 20, давчик 21 наличия полосы в. валках предыдущей клети, дешифратор 22, первый элемент 23 ИЛИ , Четвертый инвертор 24, блок 25 управления электродвигателем 26 перемещения секций 2 и 3, второй де шифратор 27, второй элемент 28 ИЛИ, пятый инвертор 29. Устройство работает сле/1укзщим образом. При прокатке переднего конца пол сы в рассматриваемой клети сигналы. с выходов фотоэлектрических датчико 1, расположенных на выходе из клети фиксирующих положение переднего кон ца полосы на выходе из клети в гори зонтальной плоскости относительно оси прокатки, прступают на входы пе вого блока 4 вычитания и первого ,де шифратора 22, выходы которого зависят от входнойкомбинации сигналов фотоэлектрических датчиков 1. Если полоса не смещается отнрсительно Оси прокатки, то на выходе блока 4 и дешифратора 22 сигналы равны нулю Этому положению соответствует комби нация выходных сигналов Четырех фотоэлектрических датчиков где О- - контакт разомкнут,1 контакт замкнут, р1ежим работы фотоэлектрического датчика - всветлую. Отсутствию смещения полосы от оси прокатки соответствуют также комбинации 1111 и 0000, которые могут появиться в тех случаях, когда произошло сужение полосы (в этом случае полоса находится внутри фотоэлектрических датчиков), либо ее уширение (в этом случае полоса перекрывает фотоэлектрические датчики}I В этих случаях сигналы с первого и второго выходов дешифратора 22 подаются на вход блока 25 управлени ;;вигателем 26 перемещения подвижным секциями 2 и 3 с установленными в них а каждой по два фотоэлектрических датчика 1, причем каждая пара фотоэлектрических датчиков 1 жестко закреплена в каждой из частей подвижных секций 2 и 3 таким образом, чтобы расстояние между оптическими осями фотоэ.1ектрических датчиков 1 находилась в соответствии с требуемой точностью центрирования полосы-, т.е. ДОЛЖНО соблюдаться неравенство (1) cr,f Р , а разведение и сведение правой и .левой частей подвижных секций 2 и 3 производится одновременно при наличии, комбинации .0000 и 1111 соответственно получения комбинации 1001 (центрированное положение полосы) . . В том случае, когда выходными комбинациями фотоэлектрических датчиков 1 являются комбинации. llOl и 1011, свидетельствующие о наличии одностороннего дефекта несме- . щенной полосы, сигналы с третьего и четвертого выходов дешифратора 22, прр-йдя элемент 23 ИЛИ, инвертируя с помощью инвертора 24, запрещают прохождение сигналов через, первый ключ 5, несмотря на нгшичие сигнаипов от датчика 21 и первого блока 4 вычитания, блокируя .тем самым прохождение управляющих сигналов. В случае несмещенного положения полосы на выходе блока сложения сигнал равен нулю, нулевой сигнал со второго выхода блока 6, пройдя инвертор 7, включает ключ 8. и замы.кает цепь от второго блока J2 вычитания до блоков 10 и 11 управления приводами нажимных винтов. Если на выходе блока 12 сигнал также нулевой, то сигнал на вход блоков 10 и 11 управления приводами нажимных винтов не поступает. Если не равны величины сигналов, снимаемых, с датчиков 13 и 14 давления под правым и .левым нажимными винтами, характеризующие несимметричную нагрузку, на рабочие валки под действием систем протийоизгиба и дополнительного изгиба рабочих валков при наличии несимметричного искажения профиля полосы, то на выходе блока 12 вычитания появляется сигнал, который через второй ключ 8 поступает в блок 10управления привод9м правого нажимного винта непосредственно и в б.лок 11управления приводом левого нажим- ноГо винта через инвертор 9. Приводы нажимных винтов под действием этих сигналов перемещаиотся в противоположных направлениях, вызывая перекос рабочих saJiKOs для отработки несимметричных исксшений профиля полосы, а также для устранения противоиэгиба и дополнительного изгиба рабочих валкой.
Если передний конец палосы сместился с оси прокатки, что соответствует комбинации выходных сигналов фот.одатчиков 1100 или ООН . , то сигнал с выхода блока 4, пройдя ключ 5, поступает на вход блока 6 сложения. Сигнеш с выхода блока 6 поступает в блок ДО управления приводом правого нажимного винта непосредственно и в блок 11 управления приводом левого нажимного винта через инвертор. Приводы нажимных винтов под действием этих сигналов перемещаются в противоположных направлениях, вызывая перекос рабочих валков для отработки смещения перед него конца полосы в горизонтальной плоскости относительно оси. прокатки
При прокатке заднего конца полосы когда хвост- вышел из предьщущей кл.ети, нулевой сигнал с выхода датчика 21 нашичия полосы в предыдущей клети запрещает прохождение сигналов через ключ 5, а чер.ез инвертор 20 и третий ключ 19 разрешает прохождёние сигналов с фотоэлектрических , датчиков 15., расположенных на входе в клеть и,поступающих через третий блок 18 вычитания на второй вход блока б сложения.
Если задний конец полосы не смещён относительно оси прокатки, то
на выходгц( блока 18 и второго де- шифратора 27 сигналы равны нулю, и на выходе блока 6 сложения сигнал нулевой. Нулевой сигнал с второго выхода .блока б сложения, проходя инвертор 7, включает ключ 8 и замыкает .цепь от второго блока 12 вычитания до блоков 10 и 11 управления приводами нажимных винтов. Если на в.ыходе блока 12 сигнал нулевой, то сигнсш на вход блоков управления приводами нажимных винтов не поступает. Если же величины сигналов,снит маемых с датчиков 13 и 14 давления под правым и левым нажимными винтами, не ргшны, то устройство работает так же,как и при прокатке переднего конца полосы.
I . В случаях сужения или расширения заднего конца полосы, но при сс ранении центрированного положений его, т.е. при комбинациях выходных сигналов фотоэлектрических датчиков 15 1111 или 0000, дешифратор
27 выдает сигналы в блок 25 управления подвижными секциями 16 и 17 с установленными в ней датчиками 15.
-Перемещение обеих частей второй под.вижной секции, т.е. одновременное сведение или разведение их, происходит до тех ПОР/-пока на выходах фотоэлектрических датчиков не получена комбинация 1001 (центрированное положение).
При наличии одностороннего дефекта несмещенной полосы, что соответствует комбинации выходных сигналов фотоэлектрических датчиков 15 вида 1011 и 1101, второй дешифратор 27 выдает сигналы, проходящие элементы 28 и 29 и запрещающее прохождение управляющих сигналов через третий ключ 19 так же, как и в случае наличия дефекта переднего конца полосы.
.Если задний конец полосы сместился с оси.прокатки, что соответствует комбинации выходных сигнгигов фотоэлектрических датчиков 110 О .или ООН, то сигнал: с выхода блока 18 вычитания поступает на вход блока
6 сложения. Сигнал с выхода блока 6 поступает в блок 10 управления приводом прёшого нажимного винта непосредственно и блок 11 управления приводом левого нажимного винта через инвертер 9. Приводы нажимных винтов под действием этих сигналив перемещаются в противоположных на.правлениях, перекос рабочих валков для отработки смещения заднего конца полосы относительно оси прокатки
Таким образом, предложенная схема выявления .односторонних дефектов переднего и заднего концов полосы позволяет устранить ошибки в определении направления и величины сме щения полосы,, а предложенная схема расстановки сдвоенных фотодатчиков,
установленных в подвижных секциях
1так, чтобы удовлетворялось требование по точности центрирования полосы
jS И , где 6 - расстояние между
оптическими осями сдвоенных фотодатчиков/ позволяет повысить точность центриров.ания полосы при прокатке.
Экономический эффект от использования изобретения составляет 360 тыс.руб. в год. :
Фаг, 1
Фотв етчика
ФотоЗат а и / прокатки дз,
Фиг Л
фиг.З
omodiamifuKu
Фиг. 5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство стабилизации профиля полосы | 1975 |
|
SU582859A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
