б
о 4
Э)
о а Изобретение относится к устройствам для передачи контейнеров или дру гих штучных изделий с одного наполь ного конвейера на другой и может быть использовано в контейнерном.производстве. Известнб устройство для передачи контейнеров с одного конвейера на другой, содержащее установленную перпендикулярно трассам конвейеров рамку с кареткой в направляющей балке и силовыми цилиндрами Недостаткомэтого устройства является то, что рамка не может быть возвращена к подающему конвейеру до тех пор, пока отводящий. конвейер не удалит контейнер из рамки, что вы зывает вынужденный простой подающего конвейера. Кроме того, осуществить передачу контейнера невозможно, если конвейеры взаимно перпендикулярны Наиболее близким по технической сущности и достигаемому результату к предлагаемому является устройство для передачи контейнеров с подающего конвейера на отводящий конвейер, выключающее подъемно-опускную балку, несущую приводную каретку с закрепленной на ней рамкой, на поперечине которой подвешены неподвиж.ные лапы и на осях - подвижные лапы с управляющим механизмом, установлен ным в зоне отводящего конвейера 2 . Недостатком этого устройства является то, что производить передачу контейнеров можно в том случае, если их днище имеет выступ, который используется для фиксации их внутри рамки. Без такого выступа надежность захвата контейнера рамкой снижается. Кроме того, упор, размещенный в зоне отводящего рольганга, перпендикулярного подводящему, препятствует движению контейнера по конвейеру. Цель изобретения - расширение тех нологических возможностей устройства Поставленная цель достигается тем что устройство для передачи контейне ров с подающего конвейера на отводящий конвейер, включающее подъемноопускную балку, несущую приводную каретку с закрепленной на ней рамкой на поперечине которой подвешены неподвижные лапы и на их осях подв.иж ные лапы с управляющим механизмом, установленным в зоне отводящего конвейера, снабжено жестко смонтированными на осях подвижных лап двуплечим и одноплечим рычагами, шарнирно связанных между собой посредством тяги, и упором, размещенным в зоне подающего конвейера, при зтом оси подвижных лап смонтированы на поперечине вертикально, а управляющий механизм подвижных лап выполнен в виде силового цилиндра с шайбой на што ке, причем свободное от тяги плечо jaвyплeчeгo рычага смонтировано с возможностью взаимодействия с шайбой управляющего механизма .и упором. i На фиг.1 изображена кинематическая схрма устройства, исходное положение; на фиг.2 - направляющая балка и рамка вместе с контейнером (подняты); на фиг.З - вид А на фиг.1, на фиг.4 - то же, перед возвращением рамки в исходное положение. Устройство для передачи контейнеров состоит из рамки 1, охватывающей контейнер 2. Рамка 1 сверху имеет каретку 3 с приводом (не показано) , смонтированную в направляющей подъемно-опускной балке 4. Концы направляющей балки 4 соединены шарнирно со штоком качающихся пневмоцилиндров 5 и 6, установленных на фундаменте. Для фиксации балки 4 в продольном направлении на одном ее конце смонтирован в неподвижной вертикальной направляющей 7 ролик 8. Рамка 1 выполнена П-образной, причем на ее поперечине смонтированы лапы 9 и 10. Лапы 9 соединены с поперечиной жестко, а лапы 10, обращенные к отводящему конвейеру 11, соединены с поперечиной рамки при помощи вертикальных осей 12, на которых закреплены двуплечий рычаг 13 и одноплечий рычаг 14 (фиг.З).Рычаги 13 и 14 шарнирно соединены тягой 15. С боку подающего конвейера 16 (фиг.З) в зЪне отводящего конвейера 11 на фундаменте закреплен управлякадий механизм подвижных лап, выполненный в виде пневмоцилиндра 17, имеющего на штоке шайбу 18. В зоне подающего конвейера установлен упор 19. Трассы подающего 16 и отводящего 11 конвейеров (фиг.З) взаимно перпендикулярны. Балка 4 установлена параллельно отводящему конвейеру 11. Плечо 20 двуплечего рычага 13 смонтировано с возможностью взаимодействия с .шайбой 18 и упором 19. Устройство работает следующим образом. С,помощью подающего конвейера 16 контейнер 2 устанавливается внутри рамки 1 (фиг.1). В поршневые полости цилиндров 5 и 6 подается сжатый воздух, при этом направляющая балка 4 , вместе с рамкой 1 поднимается и снимает контейнер 2 с подающего конвейера 16. С помощью привода каретки 3 рамка 1 перемещается вдоль направляющей балки 4 по оси отводящего конвейера и останавливается. Подается сжатый воздух в штоковые полости цилиндров 5 и 6 и балка 4 опускается, а контейнер 2 устанавливается на конвейере 16. Подается сжатый воздух в поршневую полость цилиндра 17, который шайбой 18 воздействует на плечо 20 рычага 13 (фиг.4). Рычаг 13, в свою очередь, через тягу 15 воздействует , на рычаг 14, при этом лапы 10 пово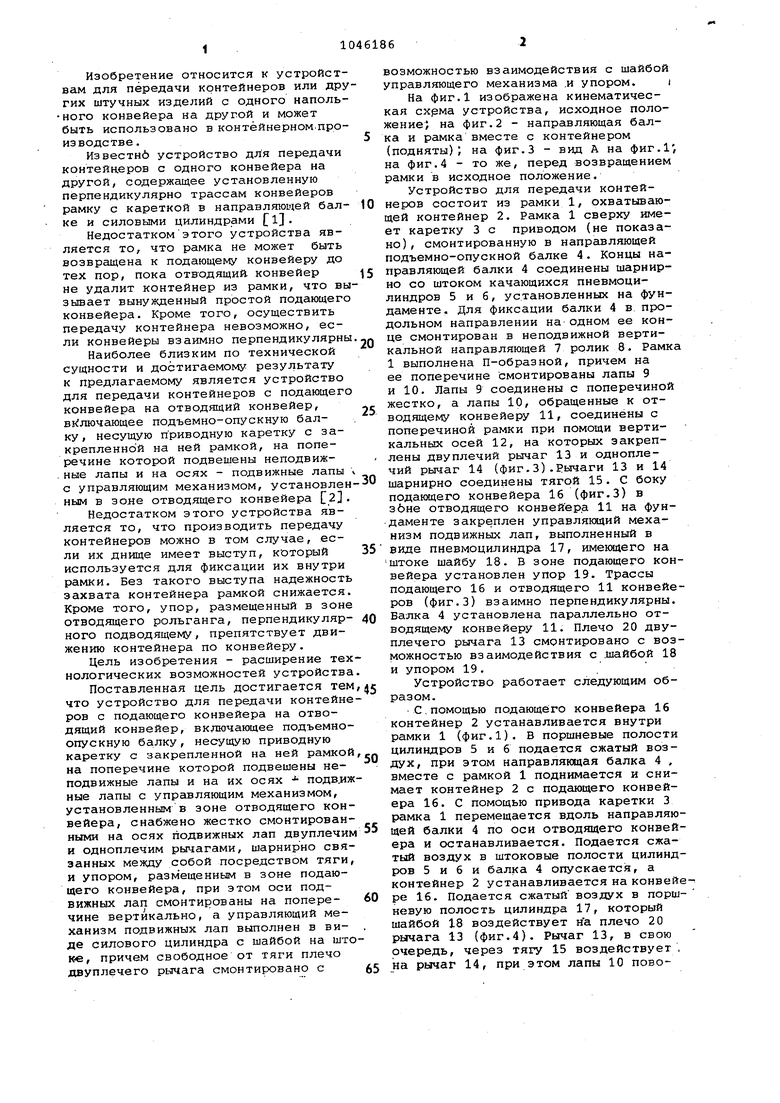

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи контейнеров с подающего конвейера на отводящий конвейер | 1983 |
|
SU1098892A2 |
| Устройство для передачи контейнеров с одного конвейера на другой | 1981 |
|
SU988715A1 |
| Устройство для передачи контейнераС пОдАющЕгО КОНВЕйЕРА HA ОТВОдящийКОНВЕйЕР | 1979 |
|
SU846453A1 |
| Тележечный конвейер | 1981 |
|
SU1008102A1 |
| Устройство для передачи контейнеров с одного конвейера на другой | 1984 |
|
SU1234321A1 |
| Устройство для укладки в пакет изделий | 1985 |
|
SU1298164A1 |
| Устройство для снятия контейнеров с конвейера | 1983 |
|
SU1142384A1 |
| Устройство для перегрузки изделий | 1982 |
|
SU1065316A1 |
| УСТАНОВКА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В КАРТОННЫЕ ЯЩИКИ | 1991 |
|
RU2005678C1 |
| Устройство для съема цилиндрических изделий с подвесного грузонесущего конвейера | 1983 |
|
SU1118592A1 |
УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ КОНТЕЙНЕРОВ С ПОДАЮЩЕГО КОНВЕЙЕРА НА ОТВОДЯЩИЙ КОНВЕЙЕР, включающее подъемно-опускную балку, несущую приводную каретку с закрепленной на ней рамкой, на поперечине которой подвешены неподвижные лапы и на осях - подвижнН51 .лапы с управлякяцим механизмом, установленным в зоне отводящего конвейера, отличающееся тем, что, с целью расширения технологических возможностей устройства, оно снабжено жестко смонтированными на осях подвижных лап двуплечим и одноплечим рычагами, шарнирно связанных между собой посредством тяги, и упором, размещенным в зоне подающего конвейера, при этом оси подвижных лап смонтированы на поперечине вер- , тикально, а управляющий механизм под,вижных лап выполнен в виде силового цилиндра с шайбой на штоке, причем свободное от тяги плечо двуплечего jg рычага смонтировано с возможностью (Л взаимодействия с шайбой управляющего механизма и упором. с
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для передачи контейнеров с одного конвейера на другой | 1979 |
|
SU878694A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для передачи контейнераС пОдАющЕгО КОНВЕйЕРА HA ОТВОдящийКОНВЕйЕР | 1979 |
|
SU846453A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
