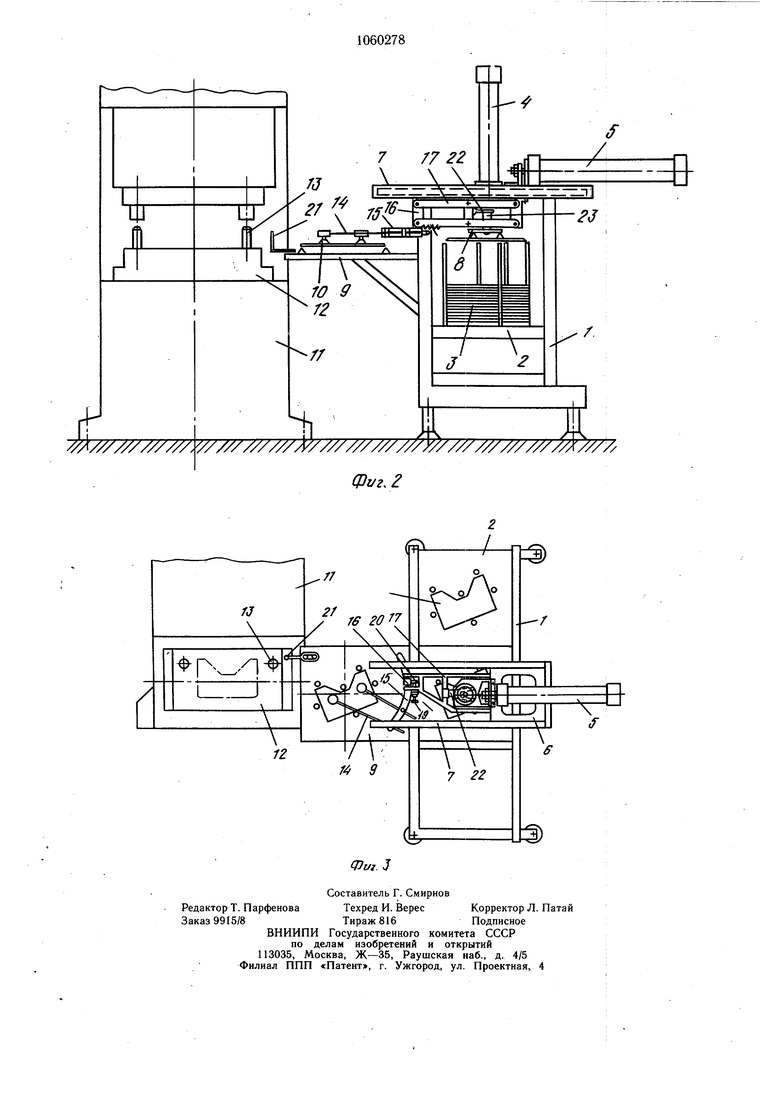
Изобретение относится к обработке металлов давлением, в частности к средствам механизации и автоматизации листоштамповочного производства, и может быть использовано в различных отраслях машиностроения для отделения заготовок от стопы и подачи их в рабочую зону пресса. Наиболее близким к изобретению по совокупности существенных признаков и достигаемому эффекту является устройство для отделения от стопы и подачи в рабочую зону пресса плоских заготовок, содержащее корпус, накопитель заготовок, промежуточный стол, подвижную траверсу, несущую щарнирно закрепленную механическую руку с захватами для отделения и переноса заготовок от накопителя к промежуточному столу и захватами для отделения и переноса заготовок от промежуточного стола в рабочую зону, приводы вертикального и горизонтального перемещения механической руки Ц Недостатком известного устройства является ограниченная зона обслуживания ввиду того, что оно может подавать заготовки в рабочую зону пресса только по прямолинейной траектории. Цель изобретения - расщирение зоны обслуживания. Для достижения цели устройство для отделения от стопы и подачи в рабочую зону пресса плоских заготовок, содержащее корпус, накопитель заготовок, промежуточный стол, подвижную траверсу, несущую щарнирно закрепленную механическую руку с захватами для отделения и переноса заготовок от накопителя к промежуточному столу и захватами для отделения и переноса заготовок от промежуточного стола в рабочую зону, приводы вертикального и горизонтального перемещения механической руки, снабжено дополнительным приводом вертикального перемещения захватов для отделения и переноса заготовок от накопителя к промежуточному столу, выполненным в виде силового цилиндра, а эти захваты связаны со щтоком силового цилиндра, механическая рука выполнена в виде шарнирного параллелограмма с параллельными вертикальными стойками, щарнирно закрепленного на траверсе, подпружиненного коромысла, щарнирно закрепленного на одной из подвижных вертикальных стоек параллелограмма с возможностью поворота в горизонтальной плоскости и снабженного средством задания траектории движения, выполненным в виде Упора, установленного с возможностью перемещения в двух взаимно перпендикулярных направлениях в горизонтальной плоскости и взаимодействия с одним из плеч коромысла, и параллельными рейками, связанными с другим плечом коромысла и несущими захваты для переноса заготовок от промежуточного стола в рабочую зону, привод вертикального перемещения механической руки снабжен толкателем, установленным на щтоке силового цилиндра, и поводком, установленным на другой вертикальной стойке параллелограмма с возможностью взаимодействия с толкателем. Кроме того, оси щарнира коромысла и привода горизонтального перемещения механической руки, выполненного в виде силового цилиндра, смещены одна относительно другой в горизонтальной плоскости. Поводок установлен с возможностью вертикального перемещения относительно подвижной стойки параллелограмма. На фиг. 1 изображено устройство при нижнем положении захватов, общий вид; на фиг. 2 - то же, при верхнем положении захватов; на фиг. 3 - то же, вид сверху. Устройство для отделения от стопы и подачи в рабочую зону пресса плоских заготовок содержит корпус 1, накопитель 2 для стопы 3 заготовок, силовой цилиндр 4 привода вертикального перемещения, привод 5 горизонтального перемещения, силовой цилиндр 4 установлен на подвижной траверсе 6, установленной в направляющих 7. На щтоке силового цилиндра 4 закреплены захваты 8 для отделения и переноса заготовок от накопителя 2 к промежуточному столу 9, а захваты 10 - для отделения и подачи заготовок от промежуточного стола 9 в рабочую зону пресса 11, на столе которого установлен штамп 12 с колонками 13, закреплены на параллельных рейках 14, установленных на одном из плеч коромысла 15. Коромысло 15 установлено в щарнире 16 одной из вертикальных стоек параллелограмма 17, подпружиненного пружиной 18, и содержит упорный винт 19,взаимодействующий с упором 20. На столе 9 установлен с возможностью регулирования положения в двух взаимно перпендикулярных направлениях в горизонтальной плоскости упор 21, который может взаимодействовать с другим плечом коромысла 15. На другой вертикальной стойке параллелограмма 17 установлен с возможностью регулирования положения относительно стойки поводок 22, взаимодействующий с толкателем 23, закрепленным на штоке силового цилиндра 4. Крепление толкателя 23 может быть осуществлено к щтоку и через промежуточный элемент. .Ось щарнира 16 коромысла 15 и ось привода 5 смещены в горизонтальной плоскости друг относительно друга. Устройство работает следующим образом. В исходном положении на промежуточном столе 9 лежит заготовка, траверса 6 находится в крайнем правом положении, захваты 8 подняты вверх силовым цилиндром 4, поводок 22 лежит на толкателе 23, фиксируя некоторое заданное заранее верхнее положение параллелограмма 17, а следовательно и всей механической руки, коромысло 15 под действием пружины 18 повернуто в крайнее положение против часовой стрелки (фиг. 3), опираясь винтом 19 в упор 20.
При подаче соответствующей команды (например, сигнала, подтверждающего удаление готовой детали из штампа 12 после прихода ползуна пресса 11 в верхнее положение) силовой цилиндр 4 спускает захваты . 8 до упора в стопу 3 заготовок. При этом опускается толкатель 23 и поворачивается параллелограмм 17, опускаются рейки 14 с захватами 10 до заготовки, лежащей на промежуточном столе 9.
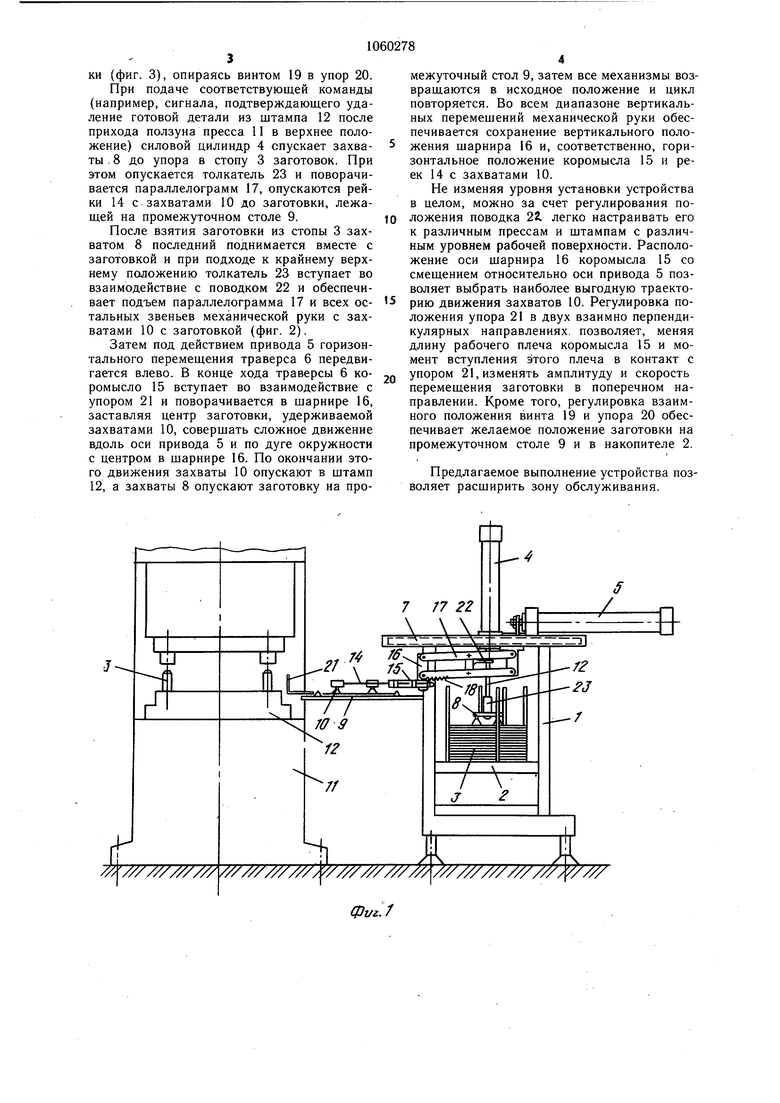
После взятия заготовки из стопы 3 захватом 8 последний поднимается вместе с заготовкой и при подходе к крайнему верхнему положению толкатель 23 вступает во взаимодействие с поводком 22 и обеспечивает подъем параллелограмма 17 и всех остальных звеньев механической руки с захватами 10 с заготовкой (фиг. 2).
Затем под действием привода 5 горизонтального перемещения траверса 6 передвигается влево. В конце хода траверсы 6 коромысло 15 вступает во взаимодействие с упором 21 и поворачивается в щарнире 16, заставляя центр заготовки, удерживаемой захватами 10, совершать сложное движение вдоль оси привода 5 и по дуге окружности с центром в шарнире 16. По окончании этого движения захваты 10 опускают в штамп 12, а захваты 8 опускают заготовку на проЩ
межуточный стол 9, затем все механизмы возвращаются в исходное положение и цикл повторяется. Во всем диапазоне вертикальных перемещений механической руки обеспечивается сохранение вертикального положения щарнира 16 и, соответственно, горизонтальное положение коромысла 15 и реек 14 с захватами 10.
Не изменяя уровня установки устройства в целом, можно за счет регулирования положения поводка 22. легко настраивать его к различным прессам и штампам с различным уровнем рабочей поверхности. Расположение оси щарнира 16 коромысла 15 со смещением относительно оси привода 5 позволяет выбрать наиболее выгодную траекторию движения захватов 10. Регулировка положения упора 21 в двух взаимно перпендикулярных направлениях, позволяет, меняя длину рабочего плеча коромысла 15 и момент вступления этого плеча в контакт с упором 21,изменять амплитуду и скорость перемещения заготовки в поперечном направлении. Кроме того, регулировка взаимного положения винта 19 и упора 20 обеспечивает желаемое положение заготовки на промежуточном столе 9 и в накопителе 2.
Предлагаемое выполнение устройства позволяет расширить зону обслуживания. Ml /У//7//7////У/////////// ///////// Фш.7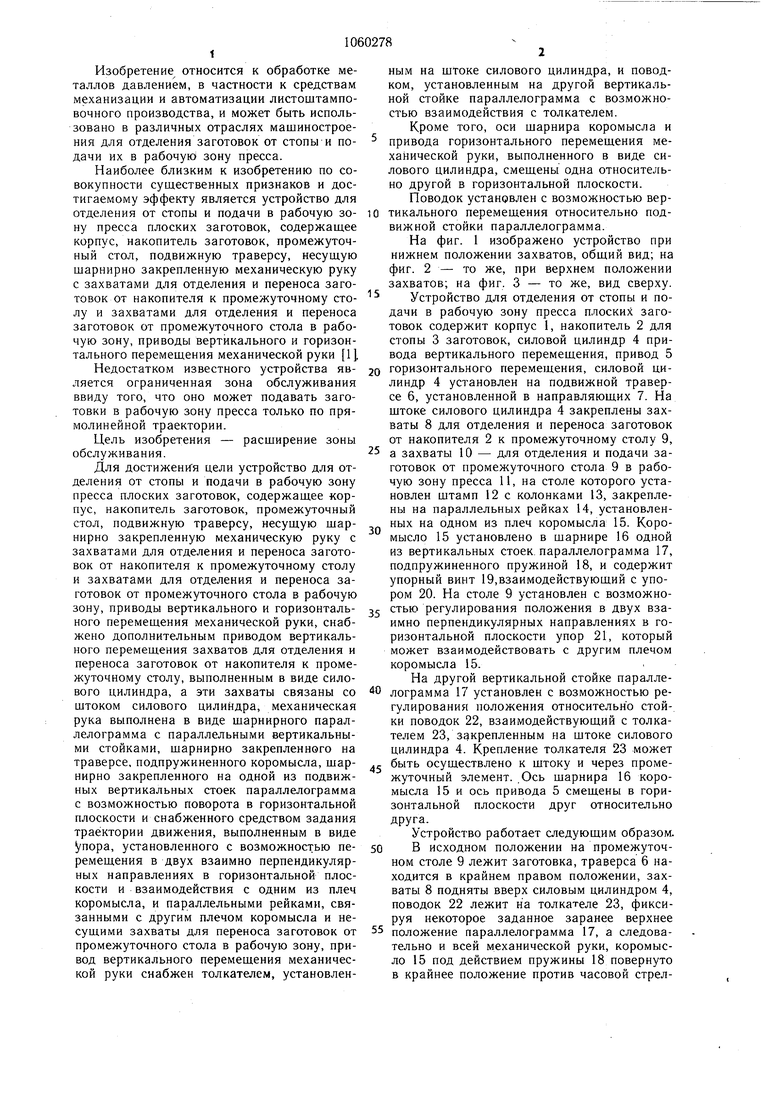
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная линия штамповки деталей | 1986 |
|
SU1389914A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| Способ отделения верхнего листа от стопы и подачи его в зону обработки и устройство для его осуществления | 1986 |
|
SU1375388A1 |
| Робот к листоштамповочному прессу | 1988 |
|
SU1542672A1 |
| Устройство для подачи заготовок из стопы в зону обработки | 1983 |
|
SU1156923A1 |
| Установка для изготовления гофрированных фильтрующих элементов из картона | 1986 |
|
SU1456184A1 |
| Автоматизированный комплекс для штамповки деталей из полосового материала | 1985 |
|
SU1296269A1 |
| Устройство для выдачи и ориентации штучных заготовок | 1987 |
|
SU1479178A1 |
| Автоматизированный комплекс для штамповки деталей | 1987 |
|
SU1581436A1 |
1. УСТРОЙСТВО ДЛЯ ОТДЕЛЕНИЯ ОТ СТОПЫ И ПОДАЧИ В РАБОЧУЮ ЗОНУ ПРЕССА ПЛОСКИХ ЗАГОТОВОК, содержащее корпус, накопитель заготовок, промежуточный стол, подвижную траверсу, несущую шарнирно закрепленную механическую руку с захватами для отделения и переноса заготовок от накопителя к промежуточному столу и захватами для отделения И- переноса заготовок от промежуточного стола в рабочую зону, приводы вертикального и горизонтального перемещения механической руки, отличающееся тем, что, с целью расширения зоны обслуживания, оно снабжено дополнительным приводом вертикального перемещения захватов для отделения и переноса заготовок от, накопителя к промежуточному столу, вылолненным в виде силового цилиндра, а эти захваты связаны со штоком силового цилиндра, механическая рука выполнена в виде шарнирного параллелограма с параллельными вертикальными СТОЙК9МИ, шарнирно закрепленного на траверсе, подпружиненного хоромысла, щарнирно закрепленного на одной из подвижных вертикальных стоек параллелограмма с возможностью поворота в горизонтальной плоскости и снабженного средством задания траектории движения, выполненным в виде упора, установленного с возможностью перемещения в двух взаимно перпендикулярных направлениях в горизонтальной плоскости и взаимодействия с одним из плеч коромысла, и параллельными рейками, связанными с другим плечом коромысла и несущими захваты для отделения и переноса заготовок от промежуточного стола в рабочую зону, привод вертикального переi мещения механической руки снабжен толкателем, установленным на щтоке силового ци(Л линдра, и поводком, установленным на другой вертикальной стойке параллелограмма с возможностью взаимодействия с толкателем. 2.Устройство по п. 1, отличающееся тем, что оси щарнира коромысла и привода гой ризонтального перемещения механической О О руки, выполненного в виде силового цилиндра, смещены одна относительно другой в горизонтальной плоскости. о ю 1 3.Устройство по п. 1, отличающееся тем, что поводок установлен с возможностью вертикального перемещения относительно 00 подвижной стойки параллелограмма.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для отделения верхнего листа от стопы и подачи его в рабочую зону пресса | 1980 |
|
SU882684A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
