1
Изборетение относится к робото- TexHHke, а именно к многофункциоиаль ным бьтстропереналаживаемым вакуумным схватам промышленных роботов.
Целью изобретения является расширение технологических возможностей схвата путем обеспечения возможности захвата объектов с различной чистовой обработки поверхности.
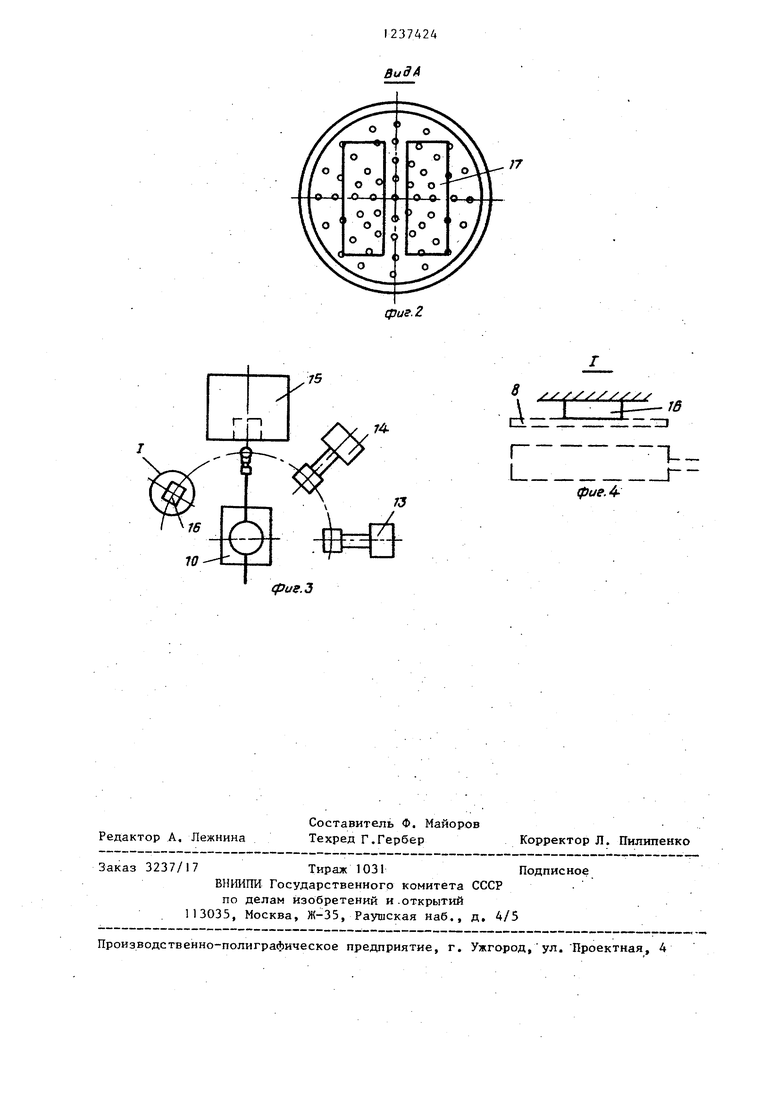
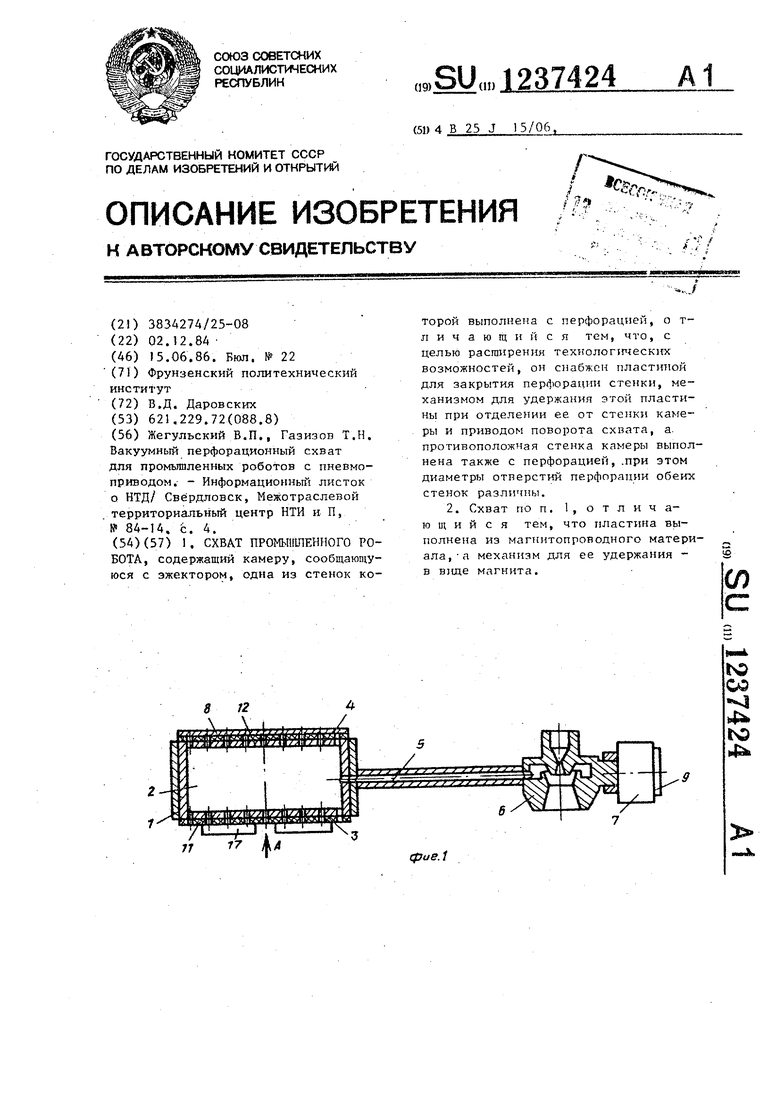
На фиг. 1 изображен схват проМьпп- ленного робота,общий вид; на фиг.2 - вид по стрелке А на фиг. 1; на фиг. 3 - компоновка робототехнологического комплекса с- использованием схвата; на фиг. 4 - узел I на фиг. 3
Схват состоит из корпуса 1, вакуумной камеры 2 с перфорированными стенками 3 и 4, жестко соединенными с корпусом I, жесткого трубопровода 5, соединяющего вакуумную камеру 2 с эжектором 6, привода 7 поворота схвата и пластины 8 для закрытия перфорации стенок 3 и 4. Причем диаметр отверстий перфораций на одной из стенок камеры 2 больше, а их количество меньше по сравненизо с количеством отверстий на другой стенке. Привод 7 жестко скреплен посредством фланца 9 с рукой манипулятора 10. На перфорированных стенках 3 и 4 закреплены уплотнительныё, например, резиновые перфорированные прокладки 11 и 12. Схват выполнен с возможностью взаимодействия посредством манипулятора 10с устройствами 1 3 и 14 .выдачи деталей, основным технологическим оборудованием 5, и механизмом 6 для удержания пластины при отделении ее от стенки 3 или 4, который может быть выполнен в виде магнита при вьтолнении пластины 8 из магнитопроводного материала. Схват взаимодействует с дета- ллми 17.
Схват работает следующим образом.
При полностью открытых отверстиях перфорации в одной из стенок 3
37424 2
или 4 и перекрытии отверстий другой стенки пластиной 8, расположенной сверху корпуса 1, эжектор 6 создает в вакуумной камере 2 пониженное по
5 сравненик) с атмосферным давление. Это обеспечивает надежное удержание пластины 8. При перекрытии части отверстий поверхностью захватываемой детали 17 разряжение Е вакуум10 ной камере увеличивается, Вследствие этого на деталь 17 действует сила, пропорциональная произведению указанной разности давлений на суммарную площадь перекрытых поверх- 15 ностью детали отверстий. За счет этой силы происходит захватывание и удержание транспортируемых от устройства i 3 к оборудованию 15 деталей 17. В случае переналадки робо20 тотехнического комплекса на вьтуск деталей с иным качеством поверхности, поштучная выдача которых осуществляется устройством 14, происходит переналадка схвата. По сигналам си25 стемы управления схват манипулятором 10 выносится к механизму 16 удержания пластины 8. Подача энергии к эжектору 6 прекращается, и пластина 8 захватывается механизмом 16, Мани30 пулятор 10 опускает схват вертикально.
Далее с помощью привода 7 попорота схват поворачивается на угол iT относительно своей оси. Под пласти3 Ной 8, .установленной в механизме 16, располагается противоположная первоначальной плоскость фланца с перфорированными отверстиями. Манипулятор поднимает схиат к пластине 8
40 и после включения эжектора 6 в работу перемещает схват к устройству 14. Сила удержания пластины 8 на схвате при полностью открытых отверстиях перфорации с противоположного флан45 ца должна превышать силу, развиваемую механизмом 16, что достигается соответствующими регулировками.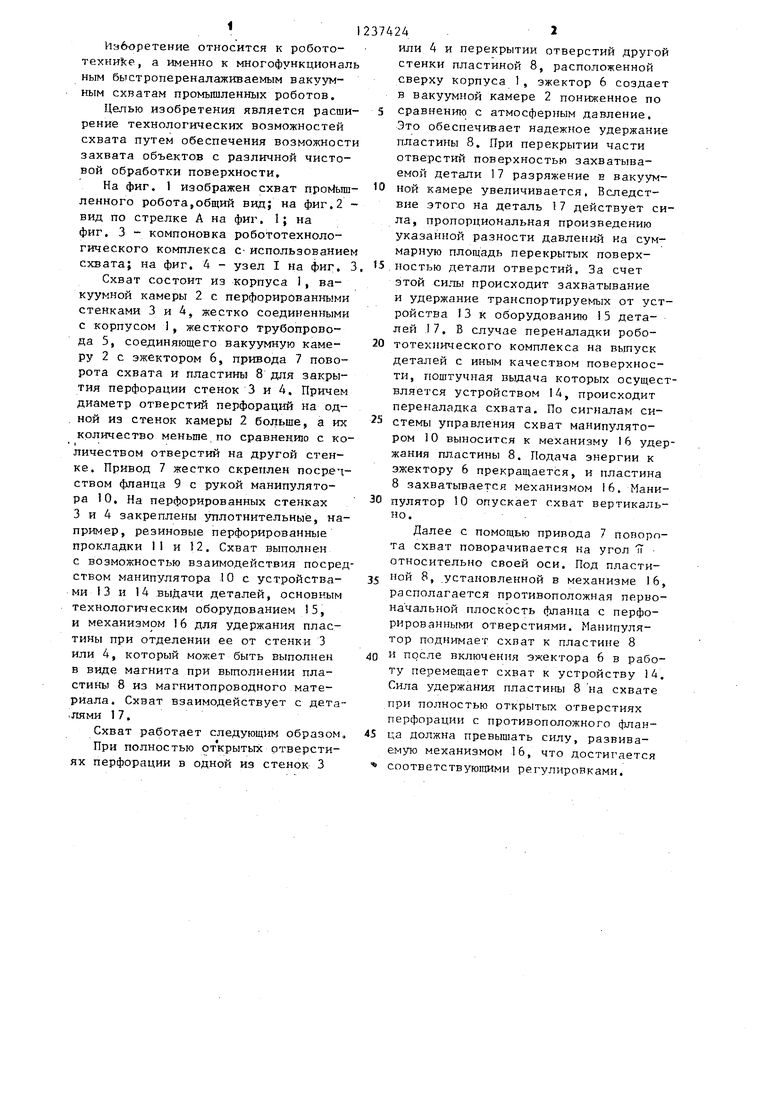
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРУГОДЕФОРМИРУЕМЫЙ СХВАТ | 2007 |
|
RU2352452C1 |
| Вакуумное грузозахватное устройство | 1982 |
|
SU1094831A1 |
| Вакуумный захват | 1988 |
|
SU1646859A1 |
| Автоматический многозахватный манипулятор | 1990 |
|
SU1731626A1 |
| Схват манипулятора | 1985 |
|
SU1585149A1 |
| ВАКУУМНЫЙ ЗАХВАТ | 1990 |
|
RU2091208C1 |
| Магазин для деталей | 1990 |
|
SU1768370A1 |
| Гибкий технологический модуль | 1986 |
|
SU1586825A1 |
| Схват манипулятора | 1989 |
|
SU1689068A1 |
| Вакуумный схват | 1989 |
|
SU1689066A1 |
X
75
ер и9.3
A-T-JrH:
16
I
I
фие.
Редактор А, Лежнина
Составитель Ф. Майоров Техред Г.Гербер
Заказ 3237/17Тираж 1031Подписное
ВНИИГГИ Государственного комитета СССР
по делам изобретений и.открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор Л. Пилипенко
| Жегульский В.П., Газиэоп Т.Н | |||
| Вакуумный перфорационный схват для промьлиленных роботов с пневмоприводом | |||
| - Информациоиньп листок о НТД/ Свердловск, Межотраслевой территориальный центр НТИ и П, № 8А-14 с | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
