Изобретение относится к абразивной обработке и может быть использовано при кглифопаиии и полировании оптических деталей с асферическими;поверхностями, применяемых в оптико-механических и оптико-электронных приборах.
Известно устройство для шлифования и полирования оптических деталей с асферическими поверхностями, выполненное в виде кинематических пар, перемещаемых вдоль ,пинии силового замыкания под действием гидравлического устройства, состоящего из нескольких замкнутых магистралей, которые соответствуют числу рабочих зон инструмента. Каждая из магистралей имеет аккумуляторы давления и механизмы плайной регулировки и непрерывного контроля этих давлений. Асферизация этим инструментом основана на распределении: работы по зонам детали за счет переменного давления в зонах (1.
Недостатком известного инструмента является ограничение возможности повышения точности асферизации из-за нестабильности силы трения в кинематических парах, перемещаемых вдоль линии силового замыкания гшд действием гидравлического устройства, так как здесь силы трения перпендикулярны к силам реакции (давления) в направляющих и находятся в прямой зависимости от него. Это приводит к увеличению силы трения, что значительно затрудняет перемещения толкателей в направляющих и ухудшает состояние смазки между трущимися поверхностями.
Цель изобретения - повышение точности лсферизации за счет повышения стабильности удельного давления в зоне обработки. Поставленная цель достигается тем, что устройство для обработки оптических деталей, содержащее центральный щпиндель привода с пальцем, входящим в паз корпуса, несущего толкатели с рабочими элементами, установленные с возможностью осевого перемещения под действием гидравлического узла, снабжено установленными в корпусе с возможностью вращения направляющими втулками для размещения толкателей, кинематически связанными с введенным в устройство поводком планетарног.о шпинделя, охватывающего центральный щпиндель, дополнительно связанный с корпусом.
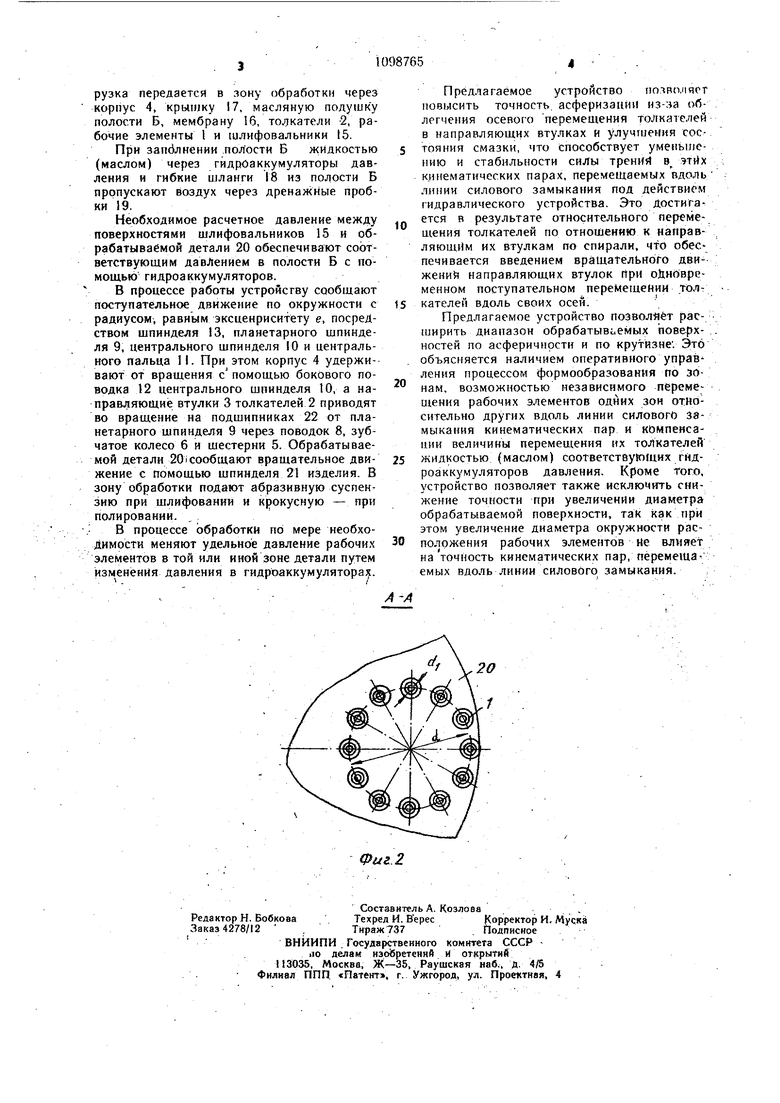
На фиг, I схематично изображено предлагаемое устройство, разрез; на фиГ. 2 - разрез А-А на фиг. I. .
Устройство выполнено в виде кинематических пар, состоящих из рабочих элементов 1, щарнирно соединенных с толкателями 2, которые размещены в направляющих втулках 3, смонтировар ных в корпусе 4 с воз:можностыо вращения вокруг своих осей. На. .направляющих втулках 3 закреплена шестерня 5, которая- кинематически связана с зубчатым колесом 6 непосредственно иЛи
же через паразитную шестерню 7. Зубчатое колесо 6 смонтировано в корпусе 4 и снабжено шарнирным звеном, например, гнездом для сферического наконечника поводка 8
планетарного щпинделя 9. Корпус 4 шарнирно связан с центральным шпинделем 10 посредством центрального пальца II и бокового поводка 12. Центральный шпиндель 10 смонтирован в отверстии планетарного щпинделя 9, смонтированного в эксцентричном отверстии шпинделя 13.
Рабочие элементы 1 связаны с корпусом 4 посредством эластичного ч., хла 14. К рабочим элементам прикреплены щлифовальники (полировальники) 15. Толкатели 2
рабочих элементов 1 взаимодействуют с аккумуляторами давления через резиновую мембрану 16 масляной подушки г1олости Б, образованной стенками крышки 17 и мембраны 16. Полость Б связана с гидроаккумуляторами с помощью гибкого шланга 18
и снабжена дренажной пробкой 19.--Устройство с помощью рабочих элементов 1 установлено на поверхность обрабатываемой детали 20, укрепленной на шпинделе 21 изделия, который расположен под углом ot к
5 оси вращения шпинделя 13. Угол с( принимается равным или близким углу ближайшего к асферической поверхности конуса .у основания.
Рабочие элементы 1 расположены на поверхности обрабатываемой детали 20 с постоянным или переменным шагом по окружности, с диаметром
,
где УК -ордината образующей обрабатываемой детали на краю; dj -диаметр щлифовальника (полировальника) рабочего элемента. Направляющие втулки 3 и зубчатое колесо 6 смонтированы в корпусе 4 соответственио на подшипниках 22 и 23.
Количество рабочих элементов 1 и гидроаккумуляторов соответствует числу кольцевых зон на обрабатываемой поверхности детали 20. Количество зон вь бирают в зависимости от асферичности и диаметра обрабатываемой детали. Толкатели 2 могут быть расположены по образующей цилиндра или же по образующей конуса, вершина которого совпадает с центром ближайшей к обрабатываемой поверхности сферы.
Устройство работает следующим Ьбра-. 0 зом.
Шпиндель 21 изделия устанавлива от под углом ot по отношению к оси шпинделя 13. На Обрабатываемую поверхность детали 20 устанавливают устройство таким образом, что ось вращения щпинделя 13 проходит 5 через центр ближайшей к обрабатываемой поверхности сферы. Рабочую нагрузку U Передают череэ центральный шпиндель 10 и центральный палец 11. Эта наг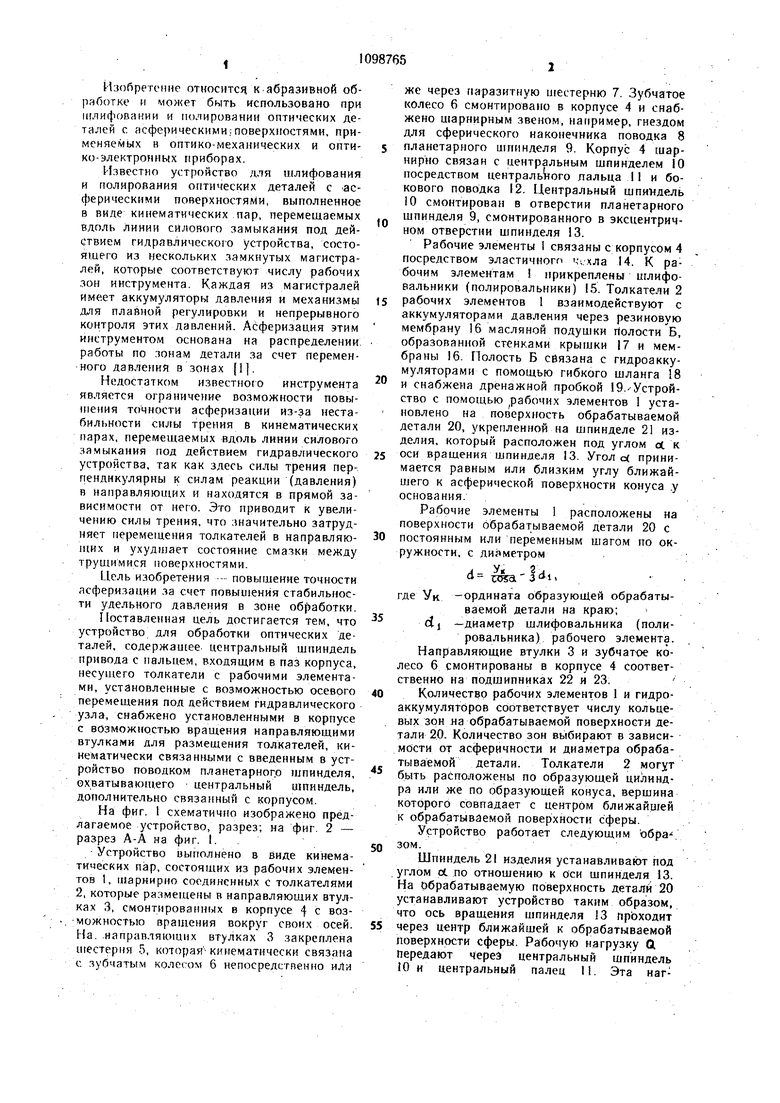
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для шлифования и полирования оптических деталей с асферическими поверхностями | 1981 |
|
SU956249A2 |
| Станок для шлифования и полирования оптических деталей с асферическими поверхностями | 1982 |
|
SU1049237A1 |
| Устройство для шлифования и полирования асферических поверхностей оптических деталей | 1982 |
|
SU1098764A1 |
| Способ формообразования асферических поверхностей крупногабаритных оптических деталей и устройство для его реализации | 2015 |
|
RU2609610C1 |
| Инструмент для обработки асферических поверхностей | 1983 |
|
SU1103996A1 |
| Станок для обработки оптических деталей с асферическими поверхностями | 1979 |
|
SU865618A1 |
| Многоэлементный инструмент для шлифования и полирования оптических деталей | 1977 |
|
SU683886A2 |
| Устройство для асферизации оптическихдЕТАлЕй | 1979 |
|
SU831562A1 |
| Устройство для обработки оптических деталей | 1983 |
|
SU1121128A1 |
| Способ асферизации оптических поверхностей вращения | 1982 |
|
SU1016139A1 |
УСТРОЙСТВО ДЛЯ ОБРАБОТ.КИ оптических ДЕТАЛЕЙ, содержащее центральный шпиндель привода с пальцем, входящим в паз корпуса, -толкатели с рабочими элементами, установ(Л лл. о со 00 -N 35 СЛ ленные с возможностью осевого перемещения под действием гидравлического узла, отличающееся тем, что, с целью повыщения, точности асферизации за счет повышения стабильности удельного давления в зоне об-работки, устройство снабжено установленными в корпусе с возможностью вращения паправляюшими втулками для размещения толкателей, кинематически связанными с введенным в устройство поводком планетарного шпинделя, схватывающего центральный шпиндель, дополнительно связанный с корпусом..
| Г | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
