N3
05 ОО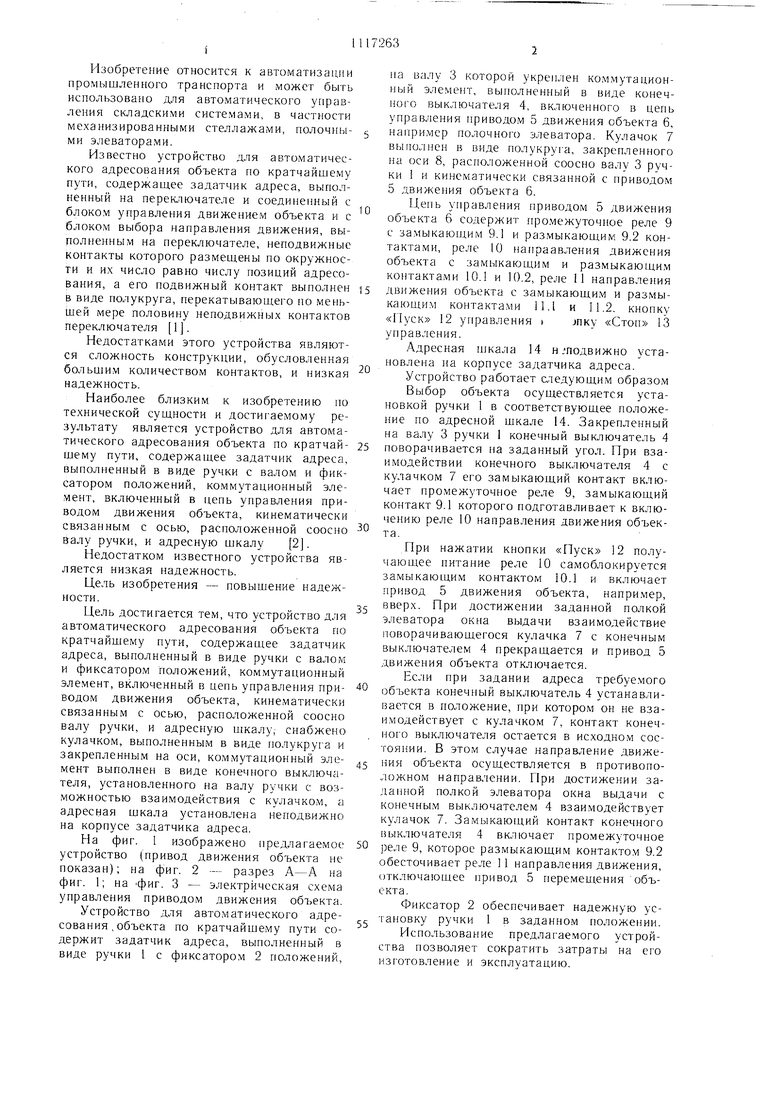
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического адресования объекта по кратчайшему пути | 1987 |
|
SU1479400A1 |
| Устройство для автоматического адресования объектов по кратчайшему пути | 1981 |
|
SU1025618A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1986 |
|
SU1357321A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1974 |
|
SU578241A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1980 |
|
SU943149A2 |
| Устройство для автоматического адресования объектов по кратчайшему пути | 1976 |
|
SU612869A1 |
| Устройство для автоматическогоупРАВлЕНия дВижЕНиЕМ Об'ЕКТА | 1979 |
|
SU839922A1 |
| Устройство для автоматического выбора направления движения объекта | 1981 |
|
SU1020325A1 |
| Устройство для адресования транспортного средства с электроприводом | 1987 |
|
SU1431988A2 |
| Устройство для автоматического выбора направления движения объекта | 1985 |
|
SU1289764A1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО АДРЕСОВАНИЯ ОБЪЕКТА ПО КРАТЧАЙШЕМУ ПУТИ, содержащее задатчик адреса, выполненный в виде ручки с валом и фиксатором положений, коммутационный элемент, включенный в цепь управления приводом движения объекта, кинематически связанным с осью, расположенной соосно валу ручки, и адресную шкалу, отличающееся тем, что, с целью повышения надежности, оно снабжено кулачком, выполненным в виде полукруга и закреиленным на оси, коммутационный элемент выполнен в виде конечного выключателя, установленного на валу ручки с возможностью взаимодействия с кулачком, а адресная шкала установлена неподвижно на корпусе задатчика адреса.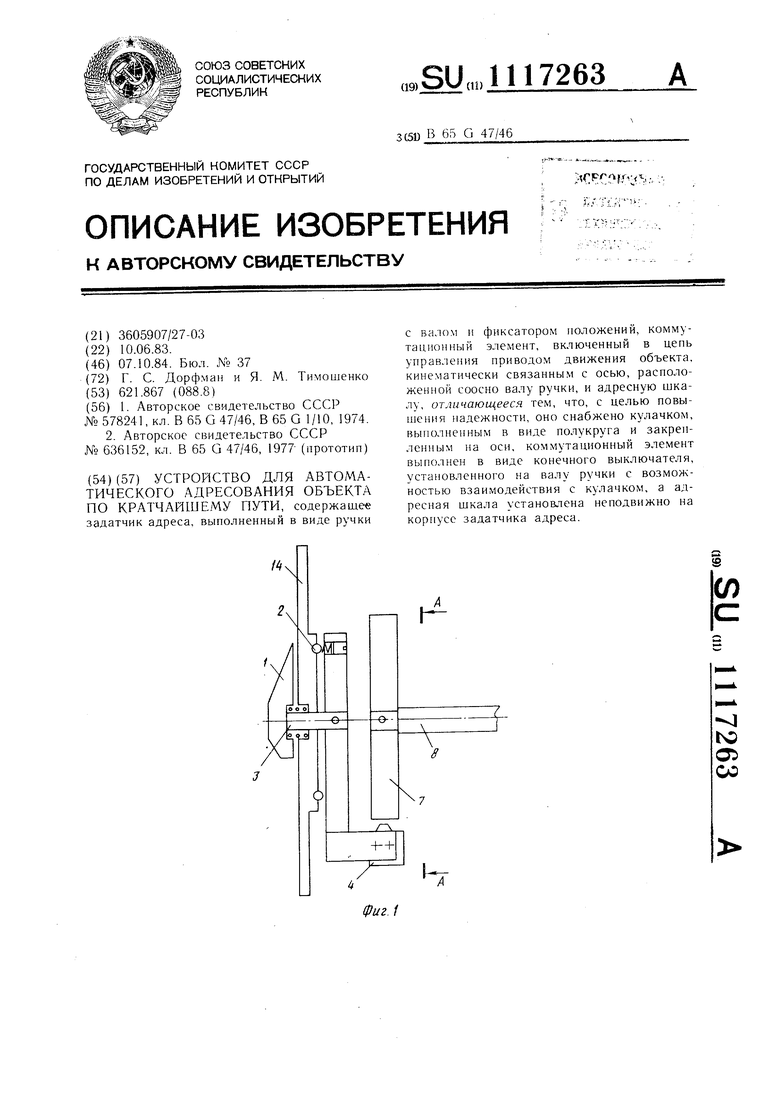
«А
фиг.1
Изобретение относится к автоматизации промышленного транспорта и может быть использовано для автоматического управления складскими системами, в частности механизированными стеллажами, полочнь)ми элеваторами.
Известно устройство для автоматического адресования объекта по кратчайшему пути, содержашее задатчик адреса, выполненный на переключателе и соединенный с блоком управления движением объекта и с блоком выбора направления движения, выполненным на переключателе, неподвижные контакты которого размеш,ены по окружности и их число равно числу позиций адресования, а его подвижный контакт выполнен в виде полукруга, перекатывающего но меньшей мере половину неподвижных контактов переключателя 1.
Недостатками этого устройства являются сложность конструкции, обусловленная больншм количеством контактов, и низкая надежность.
Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство для автоматического адресования объекта по кратчайшему пути, содержащее задатчик адреса, выполненный в виде ручки с валом и фиксатором положений, ко.ммутационный элемент, включенный в цепь управления приводом движения объекта, кинематически связанным с осью, расположенной соосно валу ручки, и адресную шкалу 2.
Недостатком известного устройства является низкая надежность.
Цель изобретения - повышение надежности.
Цель достигается тем, что устройство для автоматического адресования объекта по кратчайшему пути, содержащее задатчик адреса, выполненный в виде ручки с валом и фиксатором положений, коммутационный элемент, включенный в цепь управления приводом движения объекта, кинематически связанным с осью, расположенной соосно валу ручки, и адресную шкалу, снабжено кулачком, выполненным в виде полукруга и закрепленным на оси, коммутационный элемент выполнен в виде конечного выключателя, установленного на валу ручки с возможностью взаимодействия с кулачком, а адресная шкала установлена неподвижно на корпусе задатчика адреса.
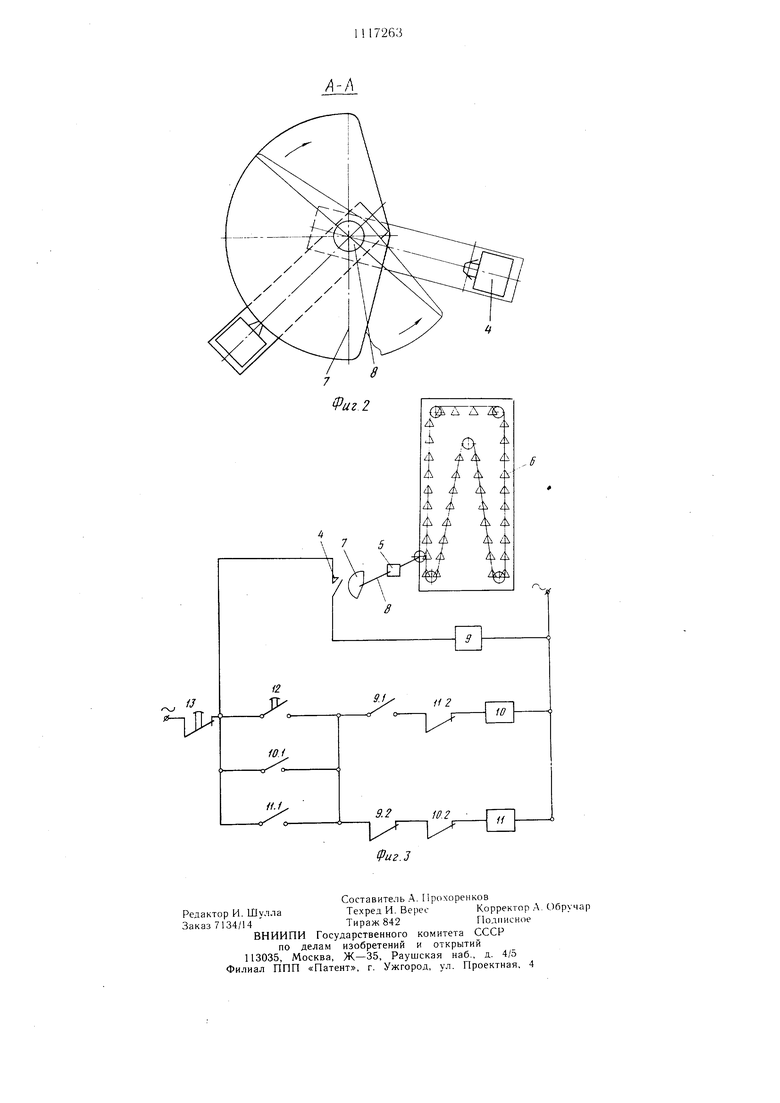
На фиг. 1 изображено предлагаемое устройство (привод движения объекта не показан); на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - электрическая схема управления приводом движения объекта.
Устройство для автоматического адресования, объекта по кратчайшему пути содержит задатчик адреса, выполненный в виде ручки 1 с фиксатором 2 положений.
па валу 3 которой укреплен ко.ммутационный элемент, выполненный в виде конечlioro выключателя 4, включенного в цепь управления приводо.м 5 движения объекта 6, нагфи.мср полочного элеватора. Кулачок 7 вы.чолнен в виде полукруга, закрепленного на оси 8, расположенной соосно валу 3 ручки 1 и кинематически связанной с приводом 5 движения объекта 6.
Цепь управления приводом 5 движения объекта 6 содержит про.межуточное реле 9 с за.мыкающим 9.1 и раз.мыкающим 9.2 контактами, реле 10 напраавления движения объекта с замыкающим и размыкающи.м контактами 10.1 и 10.2, реле 11 направления движения объекта с замыкающим и размыкающим контактами 11.1 и 11.2. кнопку «Пуск 12 управления i пку «Стоп 13 управления.
Адресная шкала 14 н.подвижно установлена на корпусе задатчика адреса.
Устройство работает следующим образом
Выбор объекта осуществляется установкой ручки 1 в соответствующее положение по адресной шкале 14. Закрепленный на валу 3 ручки 1 конечный выключатель 4 поворачивается на заданный угол. Ири взаимодействии конечного выключателя 4 с кулачком 7 его замыкающий контакт включает промежуточное реле 9, замыкающий контакт 9.1 которого подготавливает к включению реле 10 направления движения объекта.
Цри нажатии кнопки «Пуск 12 получающее питание реле 10 самоблокируется замыкающим контактом 10.1 и включает привод 5 движения объекта, например, вверх. Цри достижении заданной полкой элеватора окна выдачи взаимодействие поворачивающегося кулачка 7 с конечным выключателем 4 прекращается и привод 5 движения объекта отключается.
Ес;1и при задании адреса требуе.мого объекта конечный выключатель 4 устанавливается в положение, при котором он не взаимодействует с кулачком 7, контакт конечного выключателя остается в исходном состоянии. В этом случае направление движения объекта осуществляется в противоположном направлении. Цри достижении заданной полкой элеватора окна выдачи с конечным выключателем 4 взаимодействует кулачок 7. Замыкающий контакт конечного выключателя 4 включает промежуточное реле 9, которое размыкающим контактом 9.2 обесточивает реле 11 направления движения, отключающее привод 5 перемещения объекта.
Фиксатор 2 обеспечивает надежную установку ручки 1 в заданно.м положении.
Использование предлагаемого устройства позволяет сократить затраты на его изготовление и эксплуатацию.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1974 |
|
SU578241A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Полочный элеватор | 1977 |
|
SU636152A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
