ю i сд
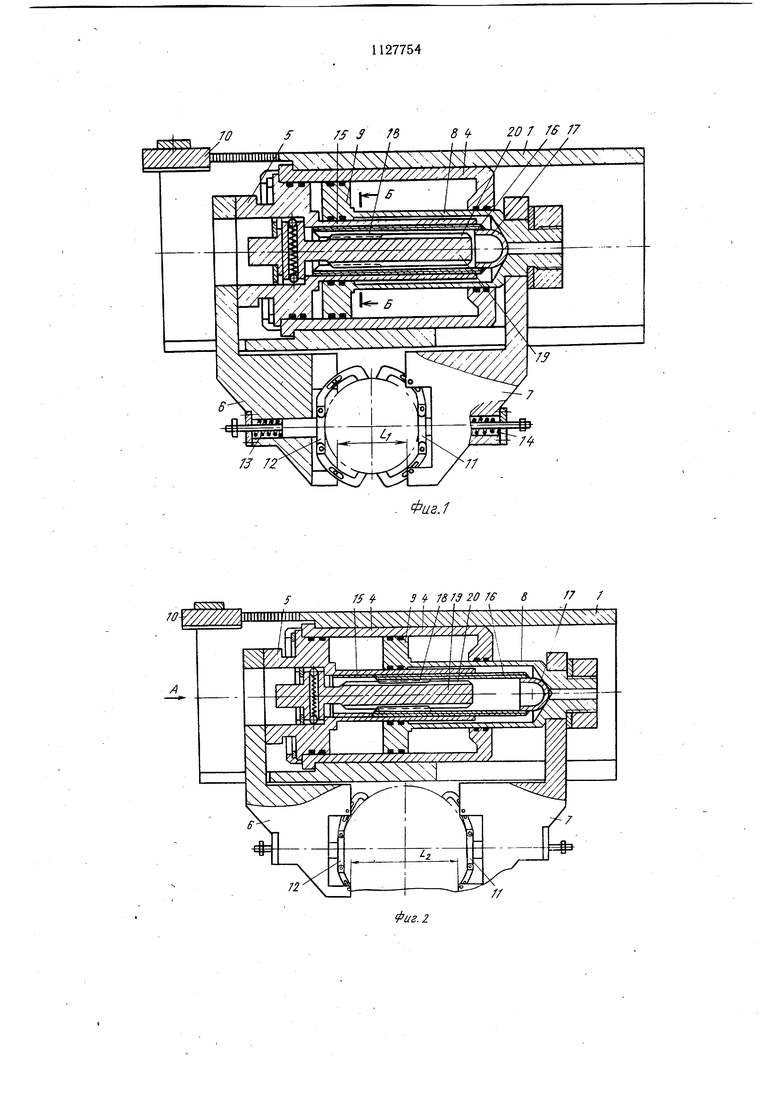
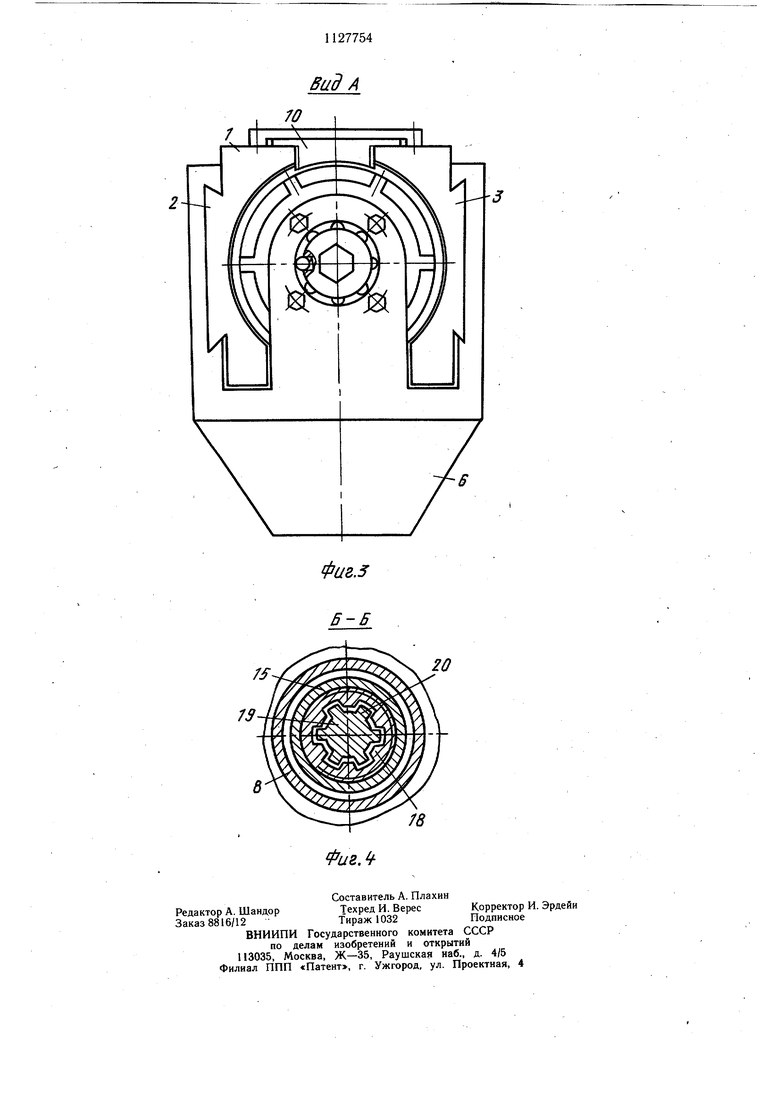
Изобретение относится к машиностроению в частности к устройствам для захвата и зажима деталей. Известно зажимное устройство, содержащее корпус, плавающие губки и силовой механизм 1. Однако это устройство не обеспечивает надежный захват различных деталей. Наиболее близким к изобретению по технической сущности является захват плавающий, содержащий корпус с направляющими, плавающий силовой цилиндр с торцовой крыщкой, губки, установленные на направляющий, одна из которых соединена с цилиндром, а другая - с штоком его порщня, и регулируемый упор, закреплениый на корпусе и взаимодействующий с цилиндром 2. Однако такое выполнение захвата не позволяет регулировать усилие зажима, что ограничивает его технологические возможности. Целью изобретения является расщирение технологических возможностей захвата. Поставленная цель достигается тем, что захват плавающий, содержащий корпус с направляющими, плавающий силовой цилиндр с торцовой крыщкой, губки, установленные на направляющих, одна из которых соединена с цилиндром, а другая - с щтоком его поршня, и регулируемый упор, закрепленный на корпусе и взаимодействующий с цилиндром, снабжен полым порщнем и щтоком, опорами, установленными на губках и связанными с ними через пружины, и расположенным в полости поршня и щтока телескопическим ограничителем в виде трехзвенного винтового механизма, включающего втулку с внутренней винтовой нарезкой закрепленной на торце крышки, обращенном к поршню силового цилиндра, промежуточный цилиндрический элемент, взаимодействующий одним торцем с штоком и имеющий на внутренней поверхности зубья, а на наружной - винтовую нарезку, взаимодействующую ,с нарезкой втулки, и хвостовик, установленный в торцовой крышке с возможностью вращения вокруг оси и также имеющей на конце зубья, взаимодействующие с зубьями промежуточного элемента. На фиг. 1 и 2 изображен предлагаемый плавающий захват при зажиме различных деталей; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - сечение Б-Б на фиг. 1. Захват плавающий содержит корпус 1 с направляющими 2 и 3, плавающий силовой цилиндр 4 с торцовой крыщкой 5 и губки 6 и 7, установленные на направляющих 2 и 3. Губка 6 соединена с цилиндром 4, а другая губка 7 - с щтоком 8 полого порщня 9. На корпусе 1 закреплен регулируемый упор 10, взаимодействующий с цилиндром 4. Захват снабжен опорами 11 и 12, установленными на губках 6 и 7 и связанными с ними через пружины 13 и 14. В полости штока 8 и порщня 9 расположен телескопический ограничитель в виде трехзвенного винтового механизма, включающего втулку 15 с внутренней винтовой нарезкой, которая закреплена на торце крыщки 5, обращенном к поршню 9, промежуточный цилинд рический элемент 16, взаимодействующий одним торцом 17 с щтоком 8, и имеющий на внутренней поверхности зубья 18, а на наружной - винтовую нарезку, взаимодействующую с нарезкой втулки 15. Захват также снабжен хвостовиком 19, установленным в торцовой крыщке 5 и имеющим на конце зубья 20, взаимодействующие с зубьями 18 промежуточного элемента 16. Захват работает следующим образом. Захват настраивают на определенный размер детали, а также на возможное отклонение ее от номинального положения на установленной поверхности. Настройка производится вращением хвостовика 19, который через промежуточный элемент 16, втулку 15, торцовую крыщку 5 и щток 8 взаимодействует с губками 6 и 7 и разводит их на требуемое расстояние. После установки регулируемого упора 10 в требуемое положение настройка считается законченной. Далее для захвата детали подается давление в левую полость силового цилиндра 4, после чего полый поршень 9 с штоком 8, на котором закреплена губка 7, перемещаются вправо, а цилиндр 4 с торцовой крыщкой 5, на которой закреплена губка 6, перемещаются влево до контакта с упором 10. После этого захват подводится к детали, подается давление в правую полость цилиндра 4 и начинается сближение губок 6 и 7. В процессе сближения однг из губок упирается в деталь и останавливается, а вторая продолжает перемещаться до тех пор, пока также не коснется детали. Далее происходит мягкий зажим детали, благодаря тому, что губки 6 и 7 упираются в деталь опорами 11 и 12, которые связаны с губками 6 и 7 через пружины 13 и 14. Зажим детали происходит до тех пор, пока торец 17 промежуточного элемента 16 не упрется в торец штока 8. Для разжима детали давление подается в левую полость цилиндра 4. Использование изобретения обеспечивает захват и зажим различных по размеру деталей с заданным усилием. Такое выполнение захвата, позволяет значительно расширить номенклатуру зажимаемых деталей, в частности позволяет зажимать тонкостенные и хрупкие детали. 8 f 20 7 Г6 77 / I / /
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1984 |
|
SU1288046A1 |
| Захватное устройство | 1986 |
|
SU1360982A1 |
| Устройство для сборки корпусных деталей с комплектующими | 1988 |
|
SU1511042A1 |
| Устройство для дорнования | 1975 |
|
SU557885A1 |
| Тиски | 1973 |
|
SU476154A1 |
| Захват манипулятора | 1980 |
|
SU984861A2 |
| Модуль роботированного агрегата | 1984 |
|
SU1274819A1 |
| Захватное устройство | 1985 |
|
SU1293021A1 |
| Переналаживаемый кондуктор | 1986 |
|
SU1388198A1 |
| Схват манипулятора | 1983 |
|
SU1093549A1 |
,
72
// 3 1879 20 75 В/7 /
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ансеров М, А | |||
| Приспособления для металлорежущих станков | |||
| М., «Машиностроение, 1975, с | |||
| Способ получения борнеола из пихтового или т.п. масел | 1921 |
|
SU114A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Общемашиностройтельные типовые и руководящие материалы | |||
| Оборудование для комплексной механизации сварочного производства | |||
| Сухой газомер с одной мембраной | 1926 |
|
SU5436A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Универсальный двойной гаечный ключ | 1920 |
|
SU169A1 |
| Паровозный золотник (байпас) | 1921 |
|
SU153A1 |
