ND
;о to
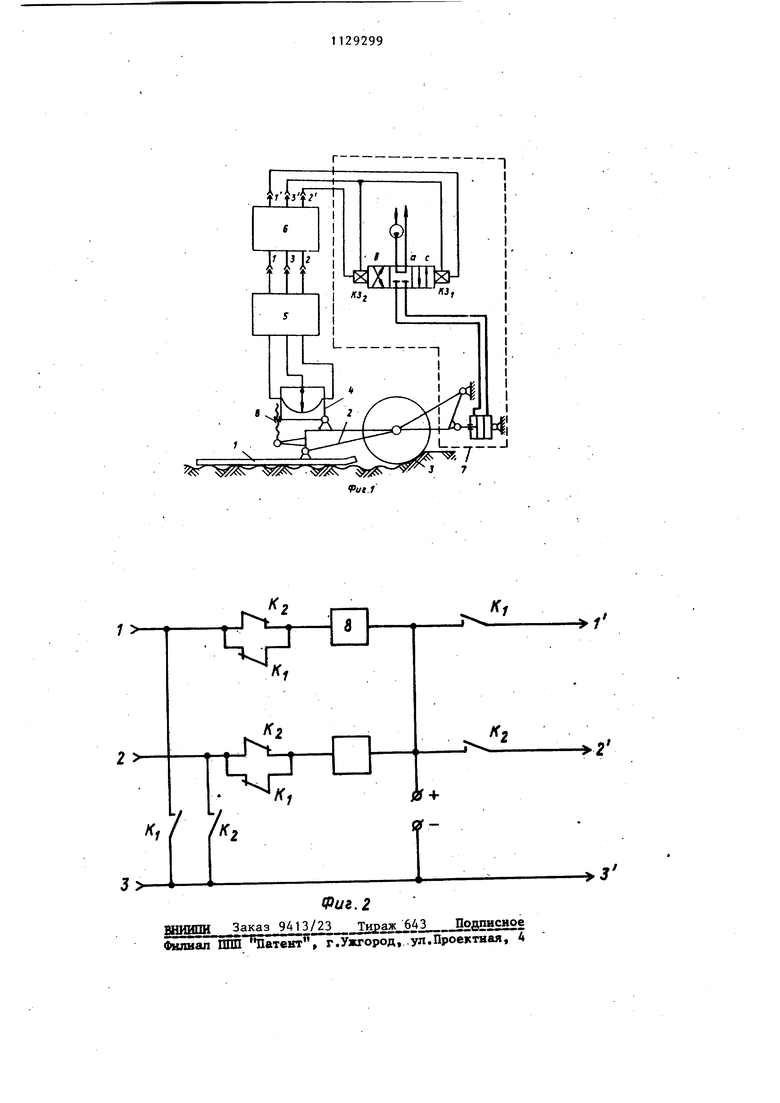
со :о 1 Изобретение относится к землеройному машиностроению и может быть использовано в землеройно-транспортных и землеройных машинах непрерывного действия для обеспечения заданного уклона продольного профиля дна траншей и каналов, горизонтальной поверхности рисовых чаков и т.п Известны неавтономные (копирные) устройства, использующие для контроля и стабилизации положения рабочего органа системы с щуповым датчиком Hi З. Недостатками данных устройств являются их сложность, необходимость в предварительной нивелировке трассы, неудобство в обслуживании. Наиболее близким к предлагаемому по технической сущности является способ обеспечения заданного уклона, заключающийся в сохранении постоянства разности уровней между кромкой рабочего органа землеройных машин и участком профиля под копирующей лыжей землеройной машины по сигналам верхнего и нижнего порогов чувствительности датчика уклона I Однако известньй способ не обеспечивает достаточной точности, так как при работе автономных систем идет процесс накоплен 1я ошибки. Это происходит потому, что известный спо со.б предполагает движение копирующей лыжи и рабочего органа точно по заданному уровню, а это практически невозможно из-за существования порога чувствительности датчика уклона. Цель изобретения - повьшгение точности путем исключения накопления ошибки. Поставленная цель достигается тем что согласно способу обеспечения заданного уклона продольного профиля земляных сооружений с помощью землеройных машин, основанному на сохране НИИ постоянства разности уровней меж ду кромкой рабочего органа и участком профиля под копирующей лыжей зем леройной машины по сигналам верхнего и нижнего порогов чувствительности датчика уклона, устанавливают верхний порог чувствительности датчика уклона на линию заданного профиля, а рабочий орган землеройной машины вынуждают колебаться между верхним и 99J нижним порогами чувствительности датчика уклона с длиной волны колебаний рабочего органа, меньшей не менее чем в два раза длины копирующей лыжи. На фиг. 1 схематично показано устройство /щя обеспечения предлагаемого способа; на фит. 2 - принципиальная схема переключающего блока. Пример. Существует автономная система (фиг. 1), которая состоит из копирующей лыжи 1, рычага 2, соединяющего лыжу с рабочим органом 3, датчика 4 уклона, установленного на этом рычаге и включенного в мостовую схему, блока усилителя 5, переключающего блока 6 и исполнительного механизма 7. Система работает следующим образом. При отклонении рабочего органа от заданного положения относительно опорной поверхности лыжи вверх (вниз) на величину верхнего (нижнего) порога чувствительности датчика уклона равновесие моста нарушается, в результате чего включается катушка К(К2) и срабатывают контакты К (Kj). Напряжение подается на катушку электрогидравлического золотника КЗ (), KOTopajt переключает золотник в положение с (в) и рабочий орган начинает опускаться (подниматься). Опускание (подъем) происходит до нижнего (верхнего) порога чувствительности датчика уклона, где снова нарушается равновесие моста, включается катушка Kj (К), одновременно катушка К(К) выключается (золотник займет положе|Ние а), напряжение подается на катушку золотника KSj (КЗ), которая переключает золотник в положение 8(с), и рабочий орган поднимается (опускается) до верхнего (нижнего) порога чувствительности датчика уклона, откуда процесс повторяется. Таким образом рабочий орган совершает колебания, в результате чего опорная поверхность лыжи скользит точно по верхнему порогу чувствительности датчика уклона и накопление ошибки исключено. Уклон задается при помощи устройства 8 (фиг. 1). Пре;у1агаемьй способ позволяет исключить накопление ошибки, что дает возможность отказаться от копирных систем.
1 .
55Г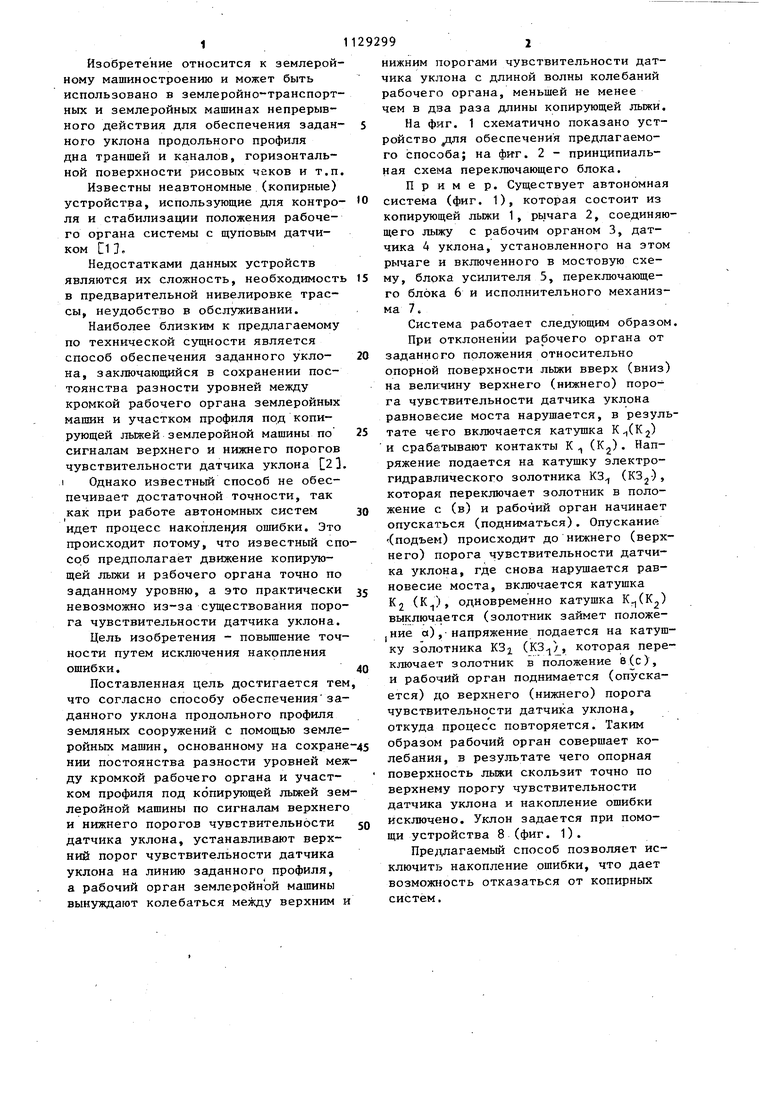
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления движением землеройно-транспортной машины по заданному курсу | 1987 |
|
SU1550053A1 |
| ЗЕМЛЕРОЙНО-МЕЛИОРАТИВНАЯ МАШИНА | 1972 |
|
SU420732A1 |
| Датчик положения рабочего органа землеройной машины | 1984 |
|
SU1239232A2 |
| УСТРОЙСТВО К ЗЕМЛЕРОЙНОЙ ПЛАНИРОВОЧНОЙ МАШИНЕ ДЛЯ ОБЕСПЕЧЕНИЯ ПЛАНИРОВКИ ПОВЕРХНОСТИ В ПРОЕКТНЫХ ПРОДОЛЬНЫХ ОТМЕТКАХ | 1962 |
|
SU160681A1 |
| ТРАНШЕЙНАЯ ЗЕМЛЕРОЙНО-Л1ЕЛИОРАТИВНАЯ МАШИНА | 1972 |
|
SU334333A1 |
| Многоковшовый траншейный экскаватор | 1961 |
|
SU144441A1 |
| Автоматический регулятор землеройной машины | 1982 |
|
SU1120073A1 |
| Датчик высотного положения рабочего органа землеройной машины (его варианты) | 1984 |
|
SU1208151A1 |
| ЦЕПНОЙ РАБОЧИЙ ОРГАН ЗЕМЛЕРОЙНОЙ МАШИНЫ | 1973 |
|
SU383788A1 |
| Устройство для управления положением рабочего органа землеройных машин | 1976 |
|
SU726277A1 |
СПОСОБ ОБЕСПЕЧЕНИЯ ЗАДАННОГО УКЛОНА ПРОДОЛЬНОГО ПРОФИЛЯ ЗЕМЛЯНЫХ СООРУЖЕНИЙ С ПОМОЩЬЮ ЗЕМЛЕРОЙНЫХ МАШН, основанный на сохранении постоянства разности уровней между кромкой рабочего органа и участком профиля под копирующей лыжей землеройной машины по сигналам верхнего и нижнего порогов чувствительности датчика уклона, отличающийся тем, что, с целью повышения точности путем исключения накопления ошибкц, устанавливают верхний порог чувствительности датчика уклона на линию заданного профиля, а рабочий органземлеройной машины вынуждают колебаться между верхним и нижним порогами чувствительности датчика уклона с длиной волны колебаний рабочего i органа, меньшей не менее чем в два раза длины копирующей лыжи. /
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент ФРГ № 1963491, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для контроля движения | 1921 |
|
SU1968A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Пецко А.Я., Пищик С.А | |||
| Автоматическ.ое устройство для обеспечения уклона дна траншей и каналов | |||
| Гидротехника и мелиорация, 1972, № 5, с | |||
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| , | |||
