2. Захват, отличающийся- щего через жесткую планку болта с подтем, что, с целью расширения диапа- пружиненной относительно, ее поверхзона контролируемых-уровней, нажим- кости головкой для взаимодействия с ной элемент выполнен в виде проходя- контактной парой.
1138305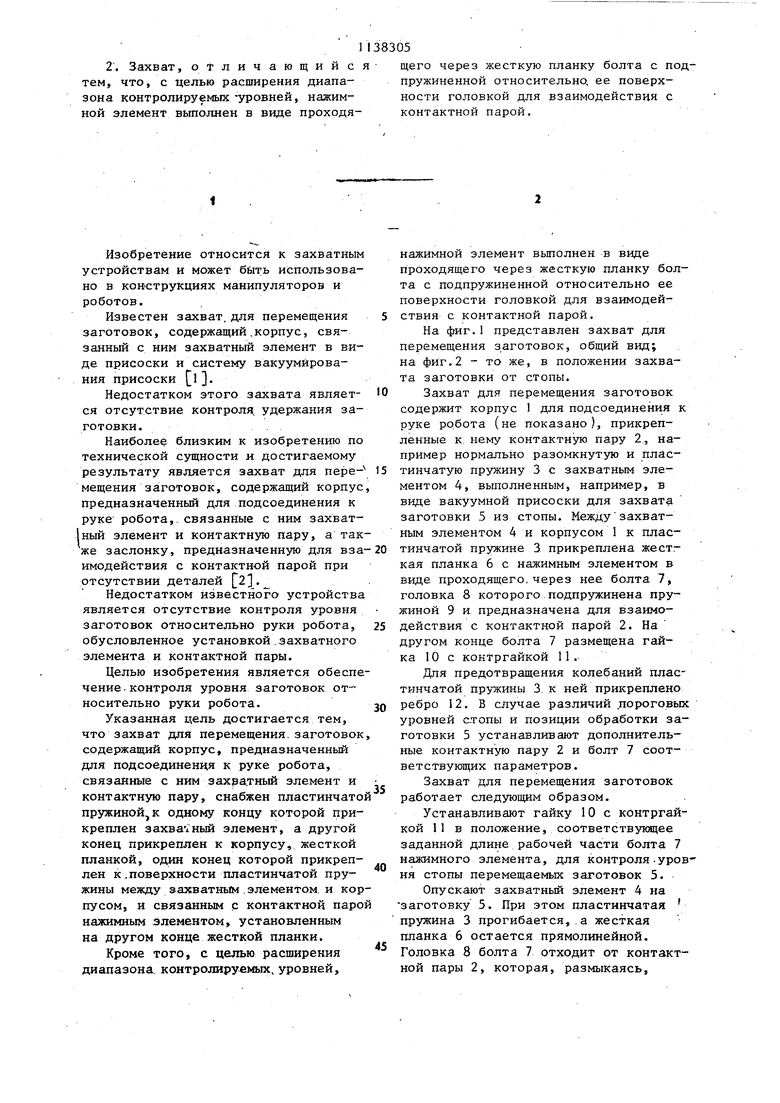
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Устройство для поштучного отделения заготовки от стопы и подачи в зону обработки | 1986 |
|
SU1388155A2 |
| Устройство для захвата текстильных заготовок | 1990 |
|
SU1735174A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Робот к листоштамповочному прессу | 1988 |
|
SU1542672A1 |
| Устройство для захвата уложенных в стопу текстильных заготовок | 1990 |
|
SU1733361A1 |
| Устройство для поштучной выдачи заготовок | 1987 |
|
SU1456271A1 |
| СПОСОБ МАНИПУЛИРОВАНИЯ И РОБОТ, ИСПОЛЬЗУЕМЫЙ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1996 |
|
RU2140849C1 |
| Устройство для отделения от стопы и подачи листовых заготовок в пресс | 1982 |
|
SU1013043A1 |
I. ЗАХВАТ ДЛЯ ПЕРЕМЕЩЕНИЯ ЗАГОТОВОК, содержащий корпус, предназначенный для подсоединения к руке робота, связанные с ним захватный элемент и контактную пару, отличающийся тем, что, с целью обеспечения контроля уровня заготовок относительно руки робота, захват снабжен пластинчатой пружиной, к одному концу которой прикреплен захватный элемент, а другой конец прикреплен к корпусу, жесткой планкой, один конец которой прикреплен к поверхности пластинчатой пружины между захватным элементом и корпусом, и связанным с контактной парой нажимным элементом, установленным на другом конце жесткой планки. (Л с 00 00 САЭ О 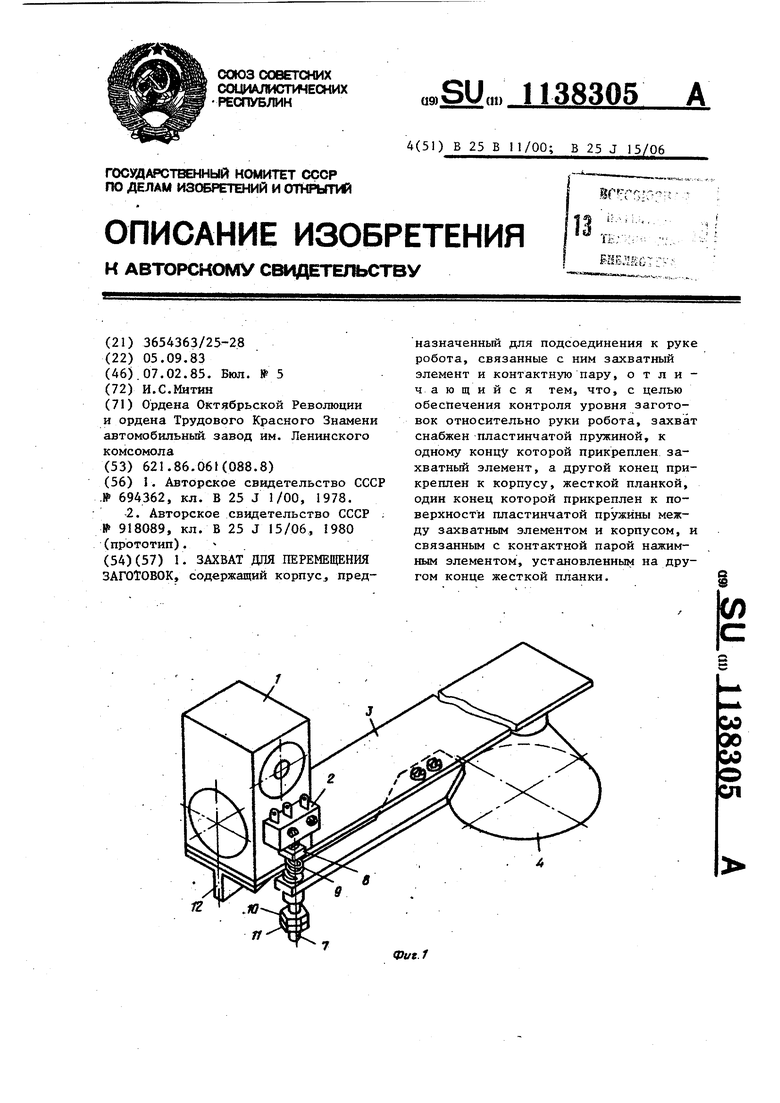
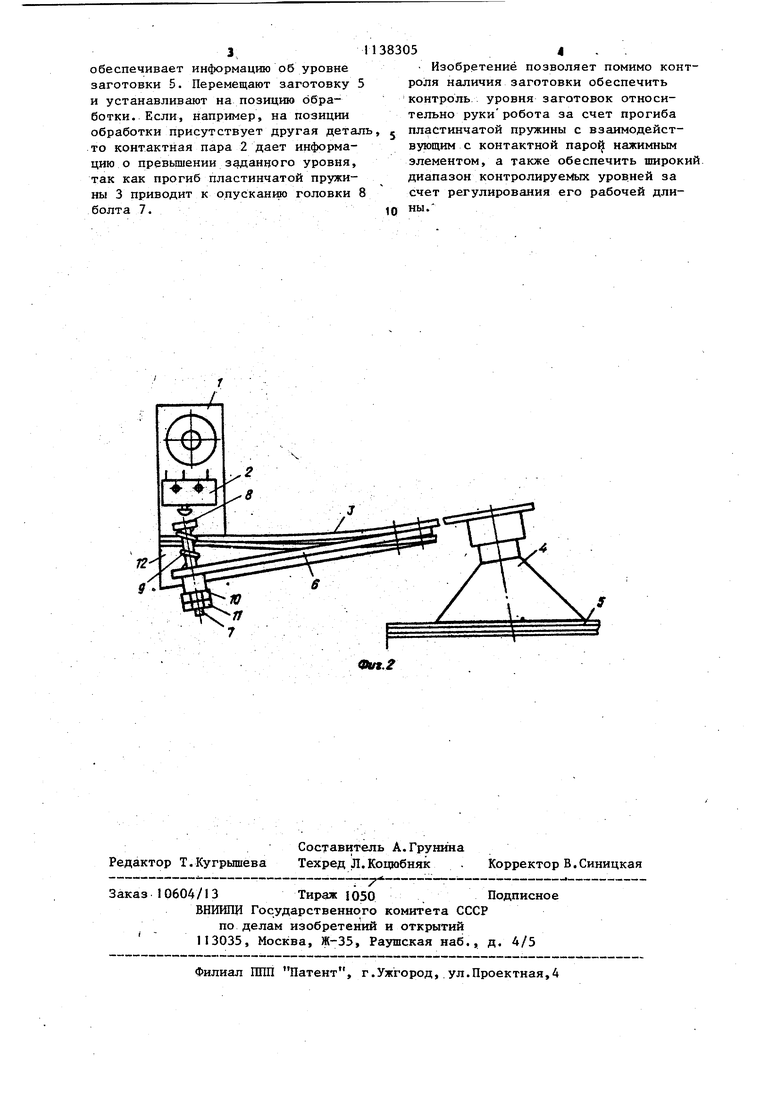
Изобретение относится к захватным устройствам и может быть использовано в конструкциях манипуляторов и роботов. Известен захват, для перемещения заготовок, содержащий.корпус, связанный с ним захватный элемент в виде присоски и систему вакуумйрования присоски l. Недостатком этого захвата является отсутствие контроля удержания заготовки,. Наиболее близким к изобретению по технической сущности и достигаемому результату является захват для перемещения заготовок, содержащий корпус предназначенный для подсоединения к руке робота,, связанные с ним захват1ный элемент и контактную пару, а так же заслонку, предназначенную для вза имодействия с контактной парой при отсутствии деталей 2. Недостатком известного устройства является отсутствие контроля уровня заготовок относительно руки робота, обусловленное установкой.захватного элемента и контактной пары. Целью изобретения является обеспе чение-контроля уровня заготовок от носительно руки робота. Указанная цель достигается тем, что захват для перемещения, заготовок содержащий корпус, предназначенный для подсоединенця к руке робота, связанные с ним захра.тный элемент и контактную пару, снабжен пластинчато прзгжиной к одному концу которой прикреплен захваГный элемент, а другой конец прикреплен к корпусу, жесткой планкой, один конец которой прикреплен к.поверхности пластинчатой пружины между захватным .элементом, и кор пусом, и связанным .с контактной паро нажимным элементом, установленным на другом конце жесткой планки. Кроме того, с целью расширения диапазона, контролируемых, уровней, нажимной элемент выполнен в виде проходящего через жесткую планку болта с подпружиненной относительно ее поверхности головкой для взаимодействия с контактной парой. На фиг.1 представлен захват для перемещения заготовок, общий вид; на фиг.2 - то же, в положении захвата заготовки от стопы. Захват для перемещения заготовок содержит корпус 1 для подсоединения к руке робота (не показано), прикрепленные к нему контактную пару 2, например нормально разомкнутую и пластинчатую пружину 3 с захватным элементом 4, выполненным, например, в виде вакуумной присоски для захвата заготовки 5 из стопы. Междузахватным элементом 4 и корпусом 1 к пластинчатой пружине 3 прикреплена жесткая планка 6 с нажимным элементом в виде проходящего, через нее болта 7, головка 8 которого подпружинена пружиной 9 и предназначена для взаимодействия с контактной парой 2. На другом конце болта 7 размещена гайка 10 с контргайкой 11. Для предотвращения колебаний пластинчатой пружины 3. к ней прикреплено ребро 12. В случае различий пороговых уровней с-топы и позиции обработки заготовки 5 устанавливают дополнительные контактную Пару 2 и болт 7 соответствующих параметров. Захват для перемещения заготовок работает следующим образом. Устанавливают гайку 10 с контргайкой 11 в положение, соответствуняцее заданной длине рабочей части болта 7 нажимного элемента, для контроля.уровня стопы перемещаемых заготовок 5. Опускают захватный элемент 4 на заготовку 5. При этом пластинчатая пружина 3 прогибается,.а жесткая планка 6 остается прямолинейной. Головка 8 болта 7 отходит от контактной пары 2, которая, размыкаясь.
обеспечивает информацию об уровне заготовки 5. Перемещают заготовку 5 и устанавливают на позицию обработки. Если, например, на позиции обработки присутствует другая деталь то контактная пара 2 дает информацию о превьшении заданного уровня, так как прогиб пластинчатой пружины 3 приводит к опусканию головки 8 болта 7.
Изобретение позволяет помимо контроля наличия заготовки обеспечить контроль, уровня заготовок относительно рукиробота за счет прогиба пластинчатой пружины с взаимодействующим с контактной паро нажимным элементом, а также обеспечить широкий диапазон контролируемых уровней за счет регулирования его рабочей длины.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Вакуумный захват | 1980 |
|
SU918089A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
