4
СО
сл
00
со
Изобретение относится к области машиностроения и может применяться в робототехнике для автоматизации сборочных процессов.
Известна захватная головка сборочного манипулятора, обеспечивающая сборку изделий путем автоматического отыскания и установки такого относительного положения двух сопрягаемых деталей, при котором возможна их сборка, за счет слежения по периметру собираемой детали с помощью сопел, которые дают сигнал на останов движения поиска после достижения соосности сопрягаемых деталей и их сборку 1.
Одна ко данная захватная головка требует
специальной наладки, заключающейся в использовании ощупывающего узла, соответствующего каждому размеру и форме сопрягаемой детали, так как команда на установ исполнительных двигателей привода подается при совпадении кромок собираемой детали и сопел. Следовательно,сопла должны располагаться по кривой, соответствующей периметру сопрягаемой детали.
Известно устройство для автоматической сборки, содержащее схват и поисковое устройство, имеющее корпус, внутри которого соосно размещен приводной толкатель и выполнена кольцевая напорная камера, соединенная с дроссельными каналами, и источник питания, в котором поиск и сопряжение деталей являются единым процессом в вихревом потоке 2.
Недостатком известного устройства является значительный расход рабочей среды для создания вихревого потока и тем самым снижение надежности.
Целью изобретения является повыщение экономичности расхода рабочей среды и надежности.
Эта цель достигается тем, что в захватной головке сборочного манипулятора, содержащей схват и поисковое устройство, имеющее корпус, внутри которого соосио размещен приводной толкатель и выполнена кольцевая напорная канавка, соединенная с дроссельными каналами, и источник питания, толкатель поискового устройства выполнен в виде порщня, на образующей поверхности которого выполнены равнорасположенные карманы, охваченные вдоль оси дроссельными каналами, выполненными в виде щелей между корпусом и поршнем, ширина которых равна щирине карманов, причем каждый карман соединен с соседними охватывающими дроссельными каналами, при этом точки их соединения образуют винтовую линию.
На фиг. 1 изображена захватная головка сборочного манипулятора с собираемыми деталями, продольный разрез; на фиг. 2 гидравлические схемы соединения карманов с дроссельными каналами.
Захватная головка 1 установлена на руке 2 сборочного манипулятора и содержит схват 3 с приводом в виде силового цилиндра 4 и поисковое устройство, которое
состоит из корпуса 5, внутри которого соосно размещен приводной толкатель в виде поршня 6. На образующей поверхности поршня 6 выполнены кольцевая напорная камера 7 и карманы 8-11, равнорасположенные по окружности, которые охвачены вдоль оси дроссельными каналами 12-15 и 16-19, выполненными в виде щелей между корпусом 5 и поршнем 6 и равными по ширине карманами 8-П. Эти карманы с помощью отверстий 20 и каналов 21 в поршне б соединены с соседними охватывающими дроссельными каналами так, что точки их соединения образуют винтовые линии 22 (фиг. 2). Так, например, карман 8 соединен с дроссельными каналами 13 и 19 соответствующей
0 линией 22, а карман 9 - с дроссельными каналами 12 и 18 и т. д.
Захватная головка 1 осуществляет ориентирование и сборку детали 23, находящейся в схвате 3, с деталью 24, закрепленной на станине 25, следующим образом.
Рабочая среда под давлением (фиг. 1) подается в кольцевую иапориую камеру 7 и, дросселируясь щелью, образованной цилиндрической поверхностью поршня б и корпуса 5, диаметральный зазор между которыми составляет, например, 0,1 мм, попадает во входные дроссельные каналы 12-15. Поскольку относительное положение поршня 6 внутри корпуса 5, сопряженных с зазором, не может быть абсолютно концентрично, гидравлические сопротивления на входе дроссельных каналов 12-15 не равны между собой, а следовательно, не равны и величины давлений в карманах-8-11, тем более, что гидравлические сопротивления на выходе дроссельных каналов 16-19 усиливают этот
0 эффект. Вследствие соединения карманов с дроссельными каналами с помощью линий 22 (фиг. 2) давления в карманах 8-11 делятся так, что суммарный вектор силы от действия давления направлен перпендикулярно к плоскости смещения поршня б
в корпусе 5. Действительно, серповидная форма зазора сопряженных порщня б н корпуса 5 в поперечном сечеиии обусловливает различные величины гидравлических сопротивлений, а относительный разворот соеQ динений дроссельных каналов и карманов на 90° - поворот вектора силы относительно плоскости смещения поршня б на тот же угол 90°. Это условие орбитального движения поршя б в корпусе 5 сохраняется в любом положении поршня, т. е.
5 обеспечивается непрерывный характер вращения оси порщня относительно оси корпуса. Путем подачи рабочей среды в полость 26 корпуса 5 осуществляегся подвод и установка присоединяемой детали 23 в деталь 24. Отвод поршня с схватом осуществляется путем подачи рабочей среды под давлением в полость 27 от источника питания (не показан).
В результате выполнения приводного толкателя в виде поршня с объемными карманами и дроссельными каналами осуществляется орбитальное поисковое движение собираемых деталей с обеспечением экономичности расхода рабочей среды.
Фиг,
Фиг.г
13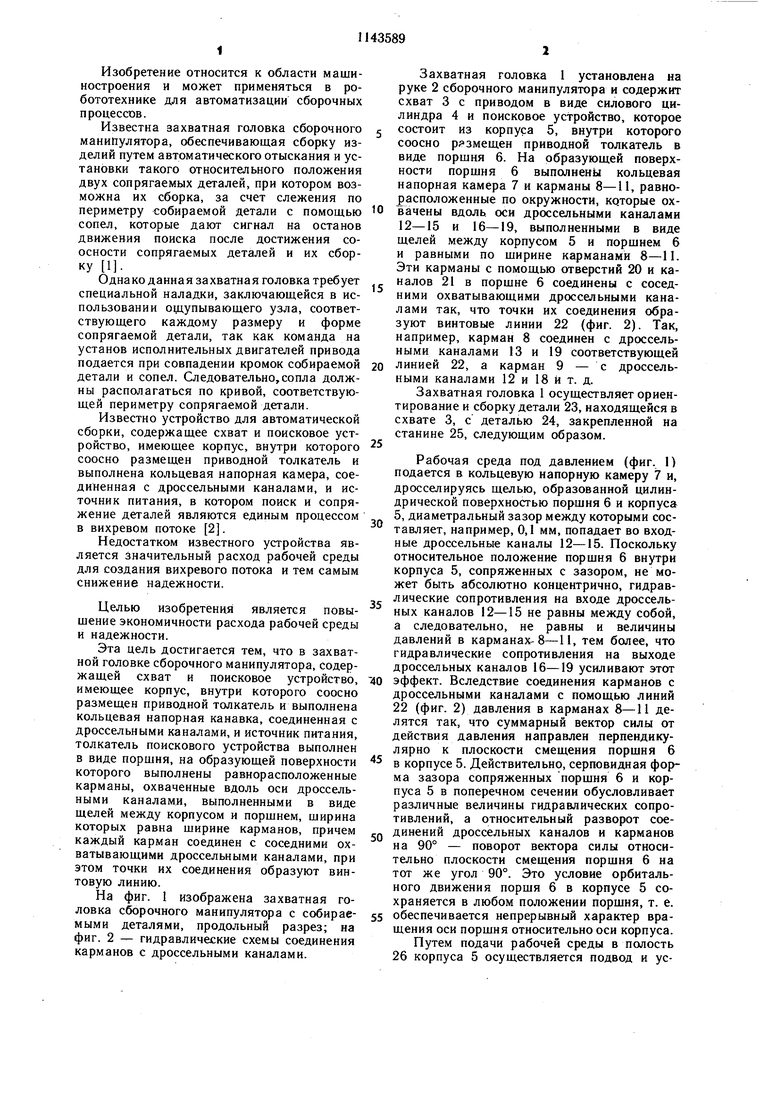

| название | год | авторы | номер документа |
|---|---|---|---|
| Сборочно-захватная головка манипулятора | 1984 |
|
SU1191281A1 |
| Пневматический сборочный схват | 1985 |
|
SU1404230A1 |
| Способ сборки клапанных узлов аэрозольных упаковок и устройство для его осуществления | 1989 |
|
SU1627355A1 |
| Устройство для сборки деталей | 1977 |
|
SU663525A1 |
| Пневматический схват | 1985 |
|
SU1766648A2 |
| Способ манипулирования | 1981 |
|
SU984791A1 |
| Адаптивная сборочная головка промышленного робота | 1988 |
|
SU1618561A1 |
| Захватная головка манипулятора | 1988 |
|
SU1572806A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| СПОСОБ СБОРКИ СОЕДИНЕНИЙ ТИПА "ВАЛ-ВТУЛКА" | 2008 |
|
RU2381095C1 |

ЗАХВАТНАЯ ГОЛОВКА СБОРОЧНОГО МАНИПУЛЯТОРА, содержащая схват и поисковое устройство, имеющее корпус, внутри которого размещен приводной толкатель и выполнена кольцевая напорная камера, соединенная с дроссельными каналами, и источник питания, отличающаяся тем, что, с целью повышения экономичности расхода рабочей среды и надежности, толкатель поискового устройства выполнен в виде поршня, на образующей поверхности которого выполнены равнорасположенные карманы, охваченные вдоль оси дроссельными каналами, выполненными в виде щелей между корпусом и поршнем, ширина которых равна ширине карманов, причем каждый карман соединен с соседними охватывающими дроссельными каналами, при этом точки их соединения образуют винтовую линию. S
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU153602A1 | |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматической сборки деталей типа вал-втулка | 1978 |
|
SU700320A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
