Од
оэ, со
4
11
Изобретение относится к механиза-ции и автоматизации обработки металлов давлением.
Цель изобретения - расширение технологических возможностей устройства за счет увеличения номенклатуры выдаваемых заготовок.
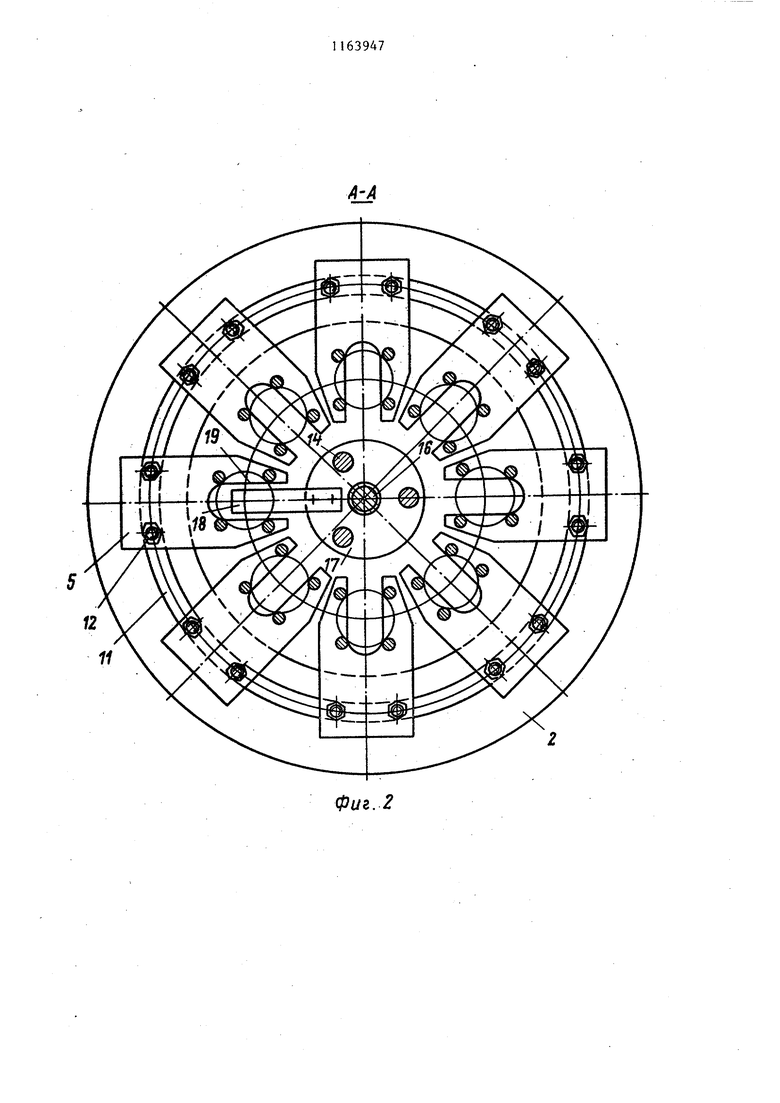
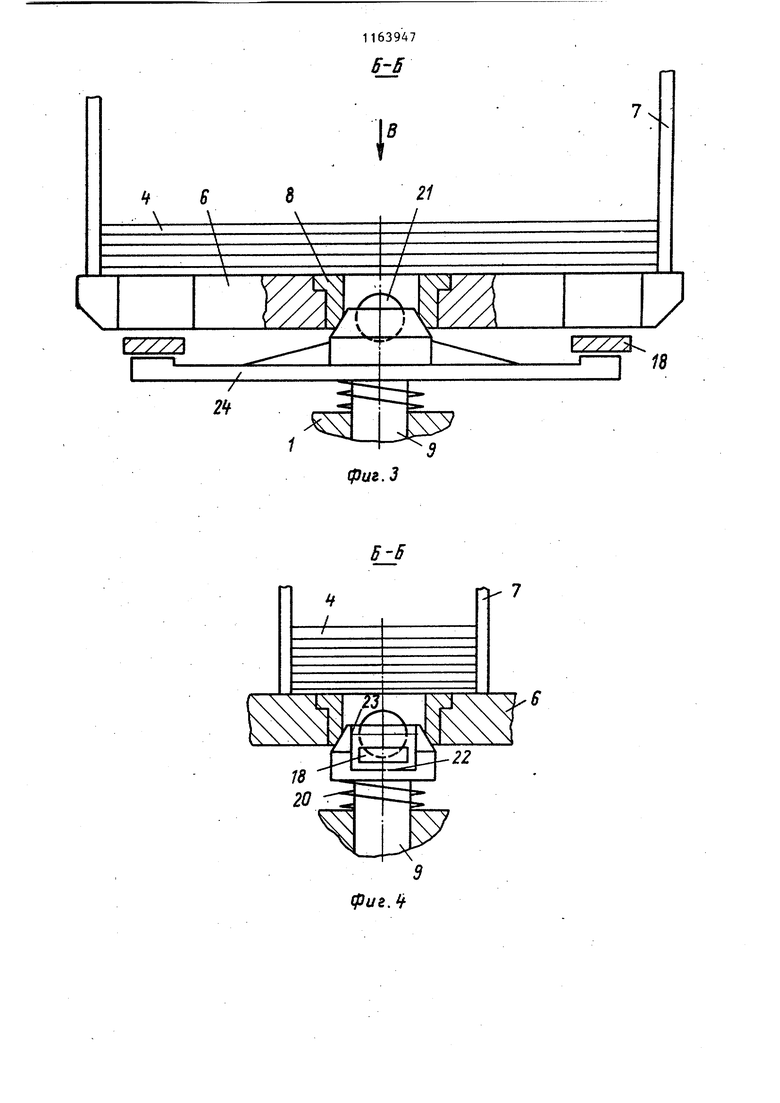
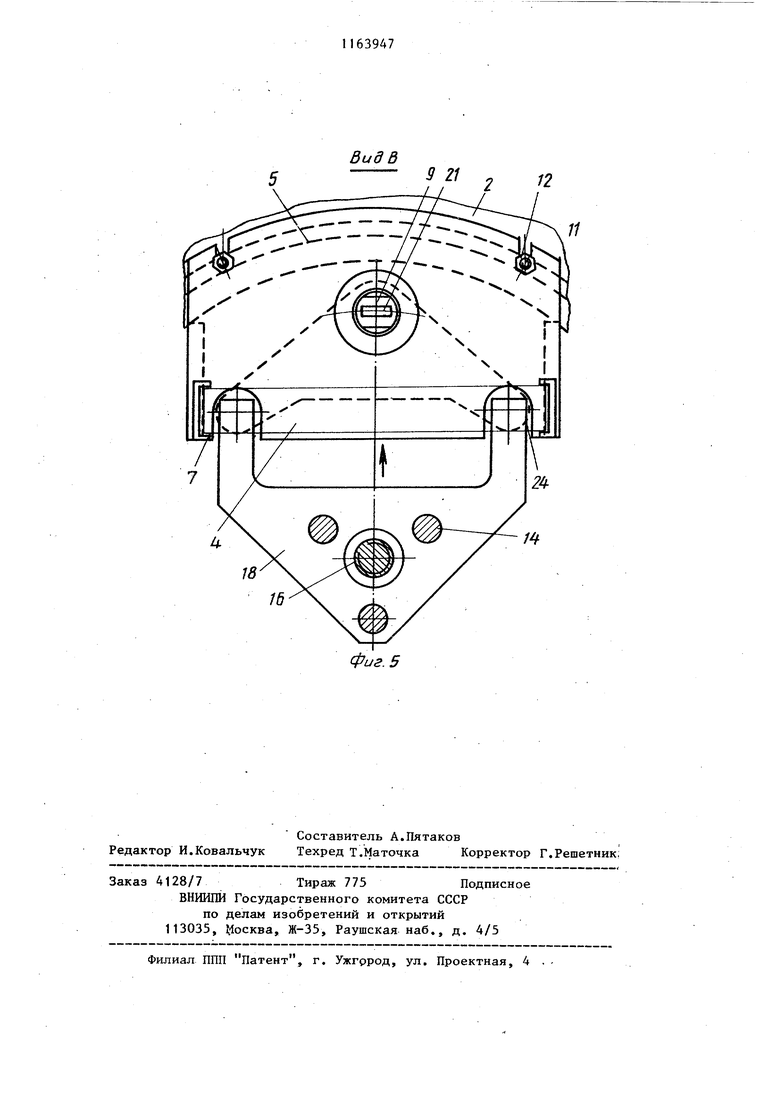
На фиг.1 изображено устройство, вертикальное диаметральное сечение} на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.1 (для длинномерных деталей); на фиг.4 - разрез Б-Б на фиг.1 (для мелких деталей)i на фиг.З вид В на фиг.З.
На основании 1 устройства установлен поворотный стол 2, в центре которого размещен механизм 3 подъема заготовок 4. На поворотном столе . 2 закреплены кассеты 5, имеющие основание 6 и штыри 7 для стоп заготовок 4. В основаниях 6 кассет 5 выполнены гнезда 8 для фиксатора 9, подвижно установленного в основании 1 .Поворотный стол 2 и основания 6 кассет 5 снабжены кольцевыми направляющими 10 и 11: канавкой в поворотном столе 2 и выступом на основании кассет либо наоборот. Кассеты 5 закрепляются на поворотном столе 2 болтами 12.
На траверсе 13, жестко соединенной с основанием 1 направляющими 14 установлен электропривод 15 вращения ходового винта 16, соединенного с ходовой гайкой 17. На ходовой гайке
17закреплена подъемная пята 18, для перемещения которой в основаниях 6 кассет 5 выполнены пазы 19.
Фиксатор 9 поджат к гнезду 8 основания кассеты 5 пружиной 20. В его верхней части смонтирована опора 21 качения, например, роликовая. Фиксатор 9 снабжен упором 22 для взаимодействия с подъемной пятой 18. В случае вьдачи мелких заготовок в верхней части фиксатора 9 выполнен торцовый паз 23, основание 22 которого служит упором для подъемной пяты
18(фиг. 4). Для обеспечения выдачи из стопы протяженных и нежестких заготовок фиксатор 9 снабжен вилообразным упором 24, закрепленным в его верхней части. Его зубцы служат упором для подъемной пяты.
Для автоматизации работы устройства предусмотрены датчики крайних верхнего 25 и нижнего 26 положений
9472
подъемной пяты верхнего 27 уровня стопы заготовок, фиксации 28 поворотного стола, углового положения кассеты 29, нейтрального положения подъемной пяты 30. Устройство содержит также схват 31 робота.
Устройство работает следующим образом.
В исходном положении фиксатор 9
находится в гнезде 8, поворотный стол 2 зафиксирован, подъемная пята 18 находится в нейтральном положении.
Команда до начала цикла подъема
.стопы заготовок 4 может подаваться роботом. Электропривод 15 вращает ходовой винт 16. При этом поднимается ходовая гайка 17, и соединенная с ней подъемная пята 18 поднимает
стопу заготовок 4 до срабатывания
датчика 27 верхнего уровня стопы заготовок 4.
Робот схватом 31 последовательно переносит заготовки на рабочую позицию (не показана). После . того, как схват робота заберет последнюю в стопе заготовку, подъемная пята 18 воздействует на датчик 25 верхнего уровня пяты. Электропривод
15 вращает ходовой винт 16 в обратную сторону, и пята 18 опускается. При этом, нажимая на упор 22 фиксатора 9, пята 18 выводит последний из гнезда 8 и воздействует на датчик
26 нижнего положения пяты, по команде которого отключается электропривод 15 и включается привод поворотного стола (не показан).
Когда поворотньш стол 2 повернется так, что гнездо 8 минует фиксатор 9, основание 6 кассеты 5 воздействует на датчик углового положения кассеты 29, по команде которого включается электропривод 15, и пята 18
поднимается и воздействует на датчик 30 нейтрального положения пяты, вы-ключающий электропривод 15.Подъемная пята 18 останавливается в нейтральном положении, не прёпятствующем повороту стола 2, а фиксатор 9 поджимается пружиной 20 к основанию 6 кассеты 5.
При этом фиксатор 9 опорой-21 ка чения катится по нижней части основания 6 кассеты 5 до тех пор, пока не попадет в гнездо 8 очередной кассе ты 5. Стол 2 зафиксирован, датчик 28
дает команду на отключение привода поворота стола. Далее цикл повторяется.
При смене типоразмера подаваемых заготовок заменяются кассеты 5. Они устанавливаются в направляющих 11 с т ОЛИ. 2 и закрепляются болтами в требуемом положении. При этом кассеты могут устанавливаться на поворотном столе на любом угловом расстЯНИН один от другого, обусловленным размерамиЗаготовок, что дает возможность максимально загрузить устройство кассетами.
При необходимости производится также замена пяты 18 и упора фиксатора 9. Фиксация поворотного стола 2 производится в любой позиции, где установлена кассета 5.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для накопления и поштучной выдачи заготовок | 1989 |
|
SU1736664A1 |
| Устройство для подачи заготовок | 1987 |
|
SU1648729A1 |
| Магазинное устройство | 1987 |
|
SU1423227A1 |
| Магазинное устройство | 1986 |
|
SU1424919A1 |
| Магазин для размещения штучных заготовок | 1988 |
|
SU1532156A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1532149A1 |
| Магазинное устройство | 1981 |
|
SU1003972A1 |
| Устройство для поштучной выдачи заготовок | 1986 |
|
SU1324728A1 |
| Устройство для отделения верхней заготовки от стопы и подачи ее в зону обработки | 1981 |
|
SU946744A1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК ИЗ СТОПЫ, содержащее основание с приводным поворотным столом, кассеты под заготовки с пазами, регулируемые по окружности на столе, узел подачи заготовок с подъемной пятой, размещаемой в пазу кассеты, подпружиненный фиксатор поворотного стола, установленный на основании, и датчики крайних положений подъемной пяты, верхнего уровня стопы заготовок и фиксации поворотного стола, отличающееся тем, что, с целью расширения технологических возможностей за счет увеличения номенклатуры выдаваемых заготовок, оно снабжено размещенным на основании с возможностью взаимодействия с кассетой датчиком ее углового положения, кинематически связанным с приводом поворота стола, поворотный стол выполнен с кольцевой направляющей, а кассеты установлены в последней, при этом фиксатор поро л ротного стола установлен с возможностью взаимодействия с пазом, выполненным в кассете, и подъемной пятой.
L20 3 26 13 I
фиг./ IB
Фиг. 2
фиг.З
П- 7
игЛ
16
Вид В
9 21
2 12
14
фиг. 5
| Устройство для подачи заготовок | 1981 |
|
SU984588A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
