О5
а со
СХ)
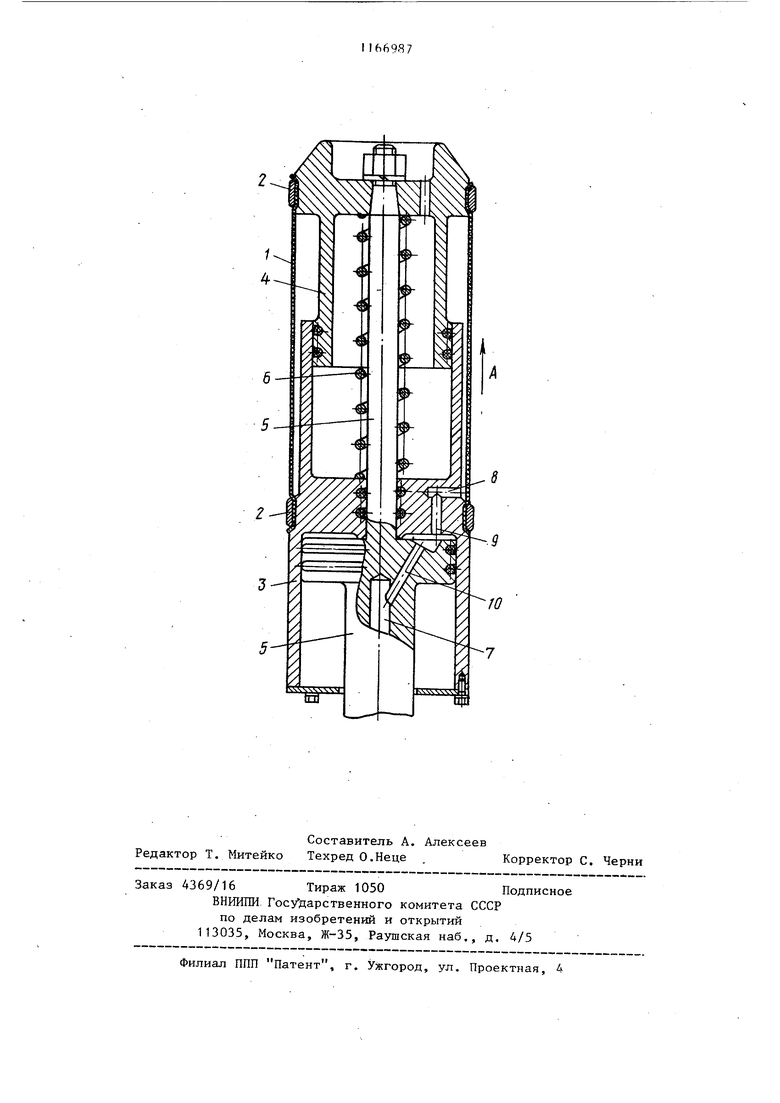
vi 1 Изобретение относится к машиностроению, а именно к схватам манипуляторов, и может быть использовано для захвата и удержания полых детале трубчатой формы. Целью изобретения является повышение надежности работы за счет увеличения усилия зажима. На чертеже изображен предлагаемый охват, общий вид. Схват содержит эластичную оболочку 1, закрепленную при помощи колец на корпусе силового цилиндра 3 и стакана 4, который жестко соединен с цельным штоком поршня 5 силового цилиндра 3, причем на шток одета пружина возврата 6. Для подачи сжатого воздуха (или жидкости), в схват в штоке поршня 5 имеется осевое отве стие 7, для подвода сжатого воздуха под эластичную оболочку 1 в цилиндре 3 имеются входные отверстия 8 и 9, а в штоковую полость цилиндра 3 - от верстие 10. Выступающая часть штока 87 поршня 5 служит для крепления устройства к руке (не показан) робота. Схват работает следующим образом. Для захвата изделия схват, жестко соединенньй с рукой робота, вводится в полость изделия. Сжатый воздух через отверстия 7-10 заполняет полости между эластичной оболочкой 1 и цилиндром 3 и полость между поршнем 5 и цилиндром 3. При этом эластичная оболочка 1 начинает раздуваться. Одновременно перемещается по стрелке (А цилиндр 3, сжимая возвратную пружину 6 и сокращая продольный размер эластичной оболочки 1. В рабочем состоянии эластичная оболочка 1 контактирует с внутренней поверхностью изделия и при дальнейшем повьш1ении давления надежно захватывает его. Применение предлагаемого схвата повьш1ает надежность работы манипулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| Вакуумный схват манипулятора | 1988 |
|
SU1521587A1 |
| Манипулятор | 1982 |
|
SU1065185A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Схват робота | 1981 |
|
SU994256A1 |
| Схват | 1979 |
|
SU837922A1 |
| Схват промышленного робота | 1988 |
|
SU1830344A1 |
| Схват манипулятора | 1987 |
|
SU1537522A1 |
| Манипулятор | 1977 |
|
SU707792A1 |
| Схват | 1987 |
|
SU1407796A1 |
СХВАТ, содержащий корпус, подвижный стакан, соединенный со штоком силового цилиндра, и эластичную оболочку, закрепленнзпо на корпусе и подвижном стакане, о т л и ч а ющ и и с я тем, что, с целью расширения диапазона размеров захватываемых деталей и повышения надежности захвата за счет увеличения усилия зажима, В корпусе выполнено отверстие, соедвнякяцее полость силового цилиндра и полость между эластичной оболочкой, корпусом и стаканом, причем силовой цилиндр размещен в корпусе. v
| Захват промышленного робота | 1979 |
|
SU831610A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| КОЛЕСО С РЕГУЛИРУЕМОЙ ДЛИНОЙ КОНТАКТА С ГРУНТОМ | 2001 |
|
RU2204489C1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
