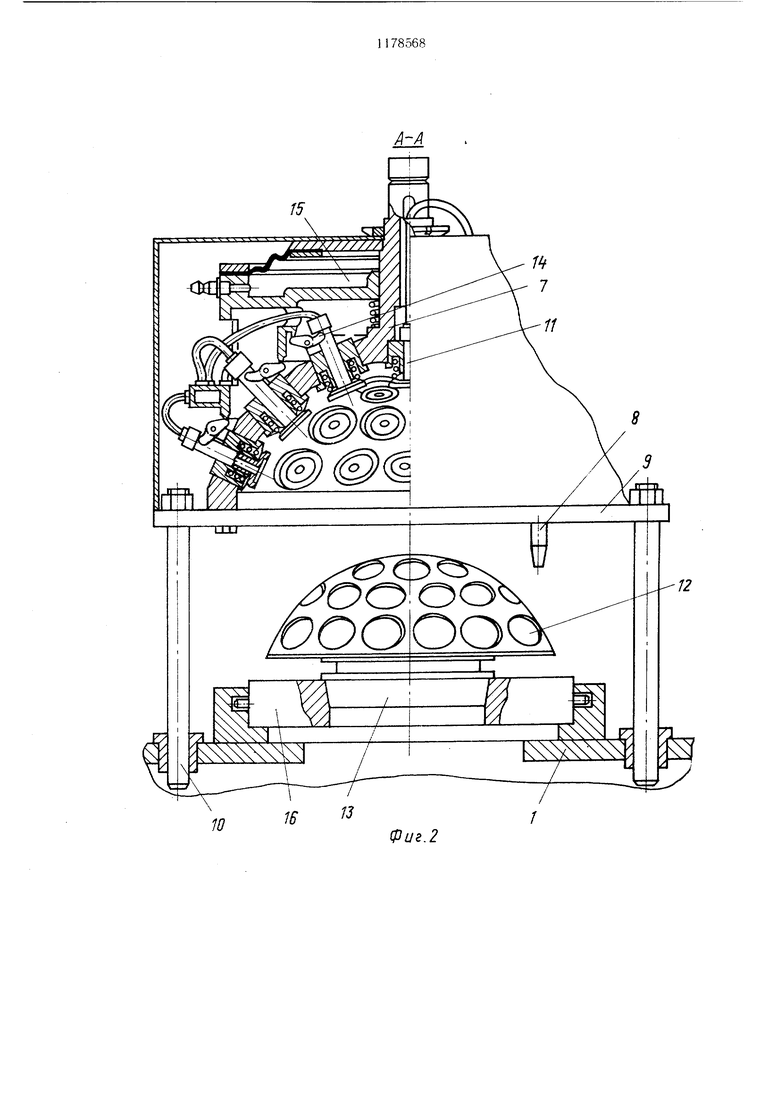
Изобретение относится к автоматизации групповой загрузки деталей и может быть использовано для установки, например, линз на сферическую поверхность наклеечного приснособления. Цель изобретения - повышение производительности загрузки деталей на сферическую поверхность наклеечного приспособления. На фиг. 1 с.хе.матически показано устройство, обишй вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - вид В на фиг. 3; на фиг. 5 - сечение Г---Г на фиг. 4; па фиг. 6 - сечение Д--Д на фиг. 4. Устройство групповой установки оптических деталей содержит станину 1 с направЛ5;ю1цими 2, вертика. пневмодвигатель 3, горизонгальный ппевмодвигате-ль 4. На иггоке 5 вертика.гьного пнев.модвигателя 3 смонтирован групповой держатель 6, содержа1ций корпус 7, сбазпрованный по двум ловителям 8, установленным в плите 9, связанный со станиной 1 через н аправ.аяюпхие колонки 10. В корпусе 7 установлены подпружиненные вакуумные захваты 11, расположенные перпендикулярно лункам 12 опоры 13, представляющие собой наклеечное приспособление со сферической поверхностью и связанные через кулачки 14 с пневмоприводом 15. Шибер групповой загрузки содержит плиту 16, установ.ленную в направляющих 2, связанную со штоко.м горизонтального пневмодвигателя 4 через рычаг 17, служаншй одновременно для захвата спутника 18 с конвейера. В плите 16 установлен неподвижный вал 19 и на подшипниках вращающиеся сегменты 20-22, нижний из которых связан с электродвигателем 23 через зубчатые колеса 24 и 25. Вращающиеся сег.менты 21 и 22 соде|)жат фиксаторы 26 конечного хода, взаимодействуюпдие с корпусом 27, связанным с неподвижным валом 19. Сегменты 21 и 22-связаны между собой и с сег.ментом 20 через кулачки 28, осуществляющие последовательное зацепление очередного сегмента нри окончании загрузки предыдущего и расположенные так, что в положении полной загрузки щибера положение карманов 29 соответствует положению лупок 30 наклеечного приспособления 13. На сегментах 21, 22 и 31 карманы 32, 33, 34 прорезаны так, что при установке их друг против друга, они образуют подобие лотка. Для центрирования линз в прорезных кар.манах 32-34 cei-менты 20 и 21 имеют кулачки 35, а сегмент 31 - кулачок 36, кинематическ1 связанный с упором 37. На транспортном лотке 38 для подачи линз 39 установлен отсекатель 40, кинематически связанный с электромагнитом 41. Для точного базирования схвата 6 относительно П1ибера в плите 16 установлены втулки 42. Наклееч82ное приспособление 13 фиксируется на спутнике 18 от проворота упором 43. Устройство работает следующим образом. Загружаемые линзы 39 по лотку 38 поступают на групповой загрузки. В исходном положении прорезаппые карманы 32-34 на сегментах 21, 22 и 31 расноложены так, что они образуют лоток, по которому линзы попадают на сегмент 20 в карман. Сегмент 20 получает вращение от электродвигателя 23 через передачу с зубчатыми колесами 24-25. Вращаясь, сегмент 20 заполняется линзами, фиксируемыми в карманах сегмента. При заполнении последнего кармана происходит зацепление сегмента 20 с сегментом 21 через кулачок 28 и далее они вращаются вместе. От преждевременного поворота сегменты 21 и 22 удерживают фиксаторы 26 конеч)1ого хода, связанные с неподвижным валом 19. Запо..;|непие cerrvieHTOB 21 22 происходит аналогично сегменту 20. Центрирование линз в прорезанных карманах 32 и 33 выпо.лпяют кулачки 35, которые установлены так, что в конце каждо1о цикла заполнения они взаимодействуют с сегментами 21 п 22 п выставляют линзы. На сегменте 31 центрирование линзы осуществляет кулачок 36, приводимый в движение упором 37 при вращепии сегмента 22. После заполнения сегмента 31 цикл загрузки заканчивается, срабатЕЛвает электромагнит 41, перекрывающий лоток 38 отсекателем 40. Далее приходит в диижение горизонтальный пневмодвигатель 4. связанный через рычаг 17 с шибером. ГТнев.модвигатель выдвигает щибер на позицию установки линз под держатель 6, который получает движение от вертика.льпого пнев.модвигателя. При опускании держателя 6 подпружиненпые вакуумные захваты 11 устанавливаются перпендикулярно карманам загрузочного щибера с зазором, далее пневмопривод 15 через кулачки 14 освобождает вакуумные захваты, которые под действием пружин с усилие.м прижимаются к линзам и присасывают их. Включается пневмопривод 15, приподнимает захваты с линзами, и весь дер.жатель уходит в верхнее положение. Горизонтальный ппевмодвигатель 4 возвращает щибер па позицию загрузки, а с конвейера рычагом 17 под держа тель устапавливается спутник 18 с наклеечным приспособлением 13. Держате.ль опускается, и вакуумные захваты с липзами устанавливаются перпендикулярно лупкам нак.ме ечного приспособления, включается пневмопривод 15, освобождаются вакуу.мные захва ты, которые устанавливают линзы в лунки наклеечного приспособления, отключается вакуум и включается пневмопривод, приподнимающий захваты, линзы остаются в лунках, держатель поднимаетея в верхнее по.пожепие. Наклеечпое приспособлепие 13 горизонтальным ппевмодержателем возвращается на копвейер, и цикл работы повторяется.
Фиг.2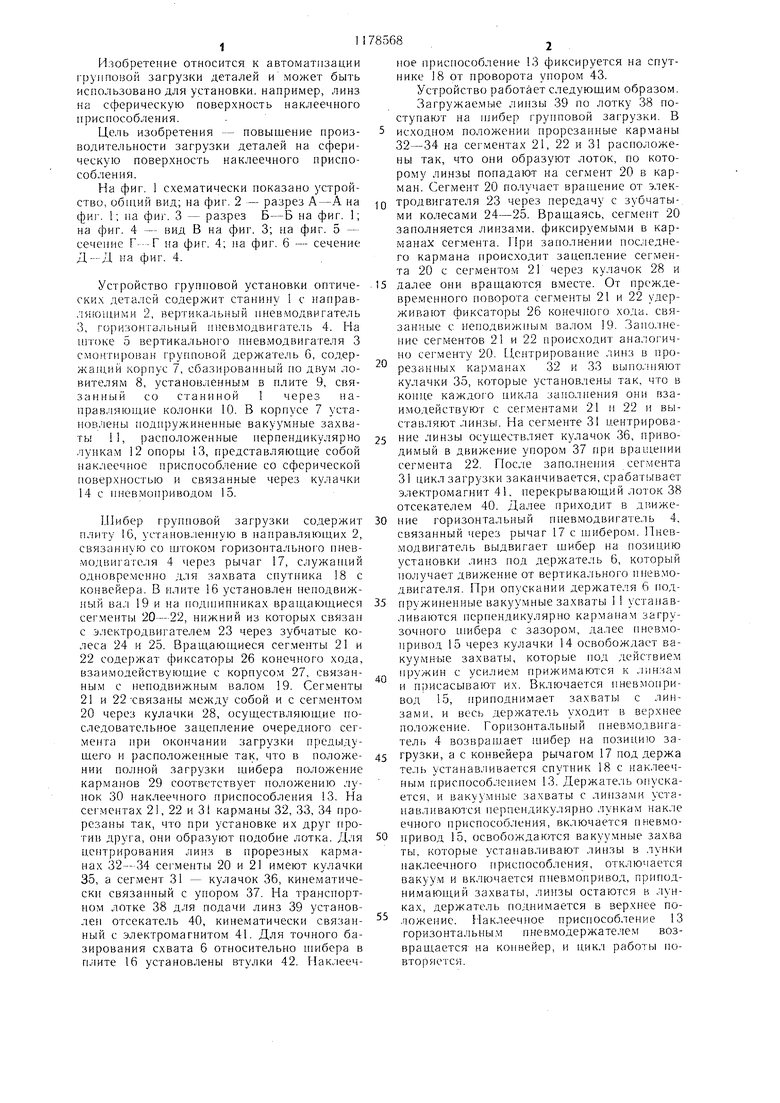
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортная система для несинхронных автоматических линий | 1982 |
|
SU1060420A1 |
| Станок для обработки оптических деталей | 1983 |
|
SU1151430A2 |
| Станок для обработки оптических деталей | 1986 |
|
SU1340998A1 |
| Устройство для загрузки | 1981 |
|
SU952526A1 |
| СПОСОБ УПАКОВКИ КАРТОННЫХ С ПОЛИМЕРНЫМ ПОКРЫТИЕМ ПРЯМОУГОЛЬНЫХ ПАКЕТОВ С ЖИДКИМ ПИЩЕВЫМ ПРОДУКТОМ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2120894C1 |
| Автоматическая линия для обработки деталей типа дисков | 1973 |
|
SU459324A1 |
| Способ загрузки токарных полуавтоматов деталями для их двусторонней обработки и автоматическая линия для его осуществления | 1988 |
|
SU1662807A1 |
| Винтозавертывающая машина | 1973 |
|
SU478706A1 |
| Загрузочное устройство | 1981 |
|
SU965718A1 |
| Машина для трафаретной печати на цилиндрических изделиях | 1989 |
|
SU1729797A1 |
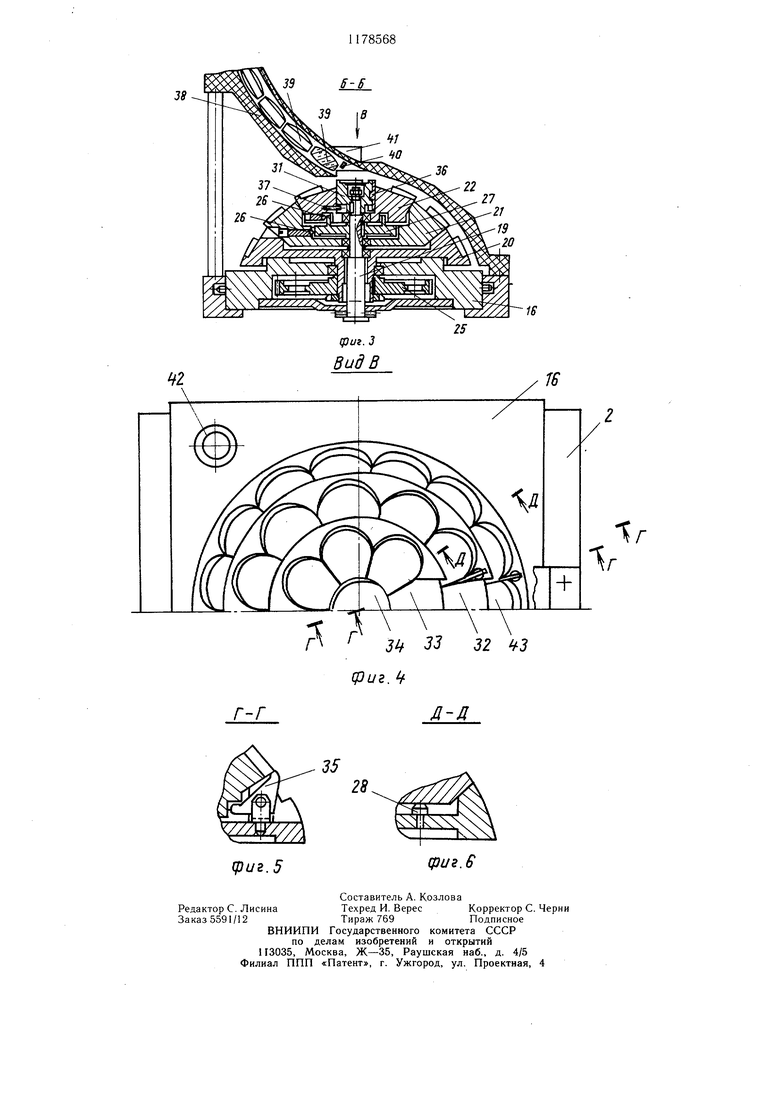
УСТРОЙСТВО ДЛЯ УСТАНОВКИ ОПТИЧЕСКИХ ДЕТАЛЕЙ, содержащее станину с смонтированными на ней опорой для размещения деталей, горизонтальными и вертикальными направляющими, на послед них из которых установлен держатель, несущий вакуумные захваты, расположенные перпендикулярно лункам опоры и узлам загрузки, отличающееся тем, что, с целью повыщения производительности процесса, схват установлен соосно опоре, а устройство снабжено соединенным с опорой шибером, смонтированным на горизонтальных направляющих станины и выполненным в виде соосно расположенных с возможностью взаимодействия друг с другом посредством кулачков сегментов с карманами для размещения деталей, нижний из которых связан с введенным в устройство приводом вращения, при этом на каждом сегменте, кроме нижнего, в одном из карманов выполнена прорезь с образованием лотка для загрузки деталей, а подпружиненные вакуумные захваты и карманы щибера расположены соответственно лункам опоры. (Л 00 СП о 00 I III 7; 7 1 18 fi 1 3030 I 13 лч 25 I 23 Zf Фиг1
| Устройство для обработки оптических деталей | 1979 |
|
SU880698A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
