второй вход первого выходного преобразователя аналогового сигнала в дискретный и вход первого элемента задержки подключены к выходу блока Jзaдaния скорости, выход первого эле мента задержки соединен с вторым входом входного преобразователя ана логового сигнала в дискретный, вычитаемый вход первого блока вычитания подключен к выходу преобразователя сил резания, вход уменьшаемого соединен с вторым входом устройства и с источником сигнала 1 задания мощности сил резания в момент окончания обработки, а выход первого блока вычитания через блок деления соединен с вторым входом блока умножения, выход которого соединен с вторым входом первого порогового элемента, третий вход блока задания скорости подключен к входу устройства и управляющему входу преобразователя сил резания, выход второго порогового элемента подключен к второму выходу устройства.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шлифовальным станком | 1981 |
|
SU1053067A1 |
| Устройство управления рабочим циклом при врезном шлифовании | 1986 |
|
SU1400865A1 |
| СИСТЕМА УПРАВЛЕНИЯ ЗУБОДОЛБЕЖНЫМ СТАНКОМ С ЧПУ | 1988 |
|
RU2023551C1 |
| Способ управления рабочим циклом поперечной подачи при врезном шлифовании и устройство для его осуществления | 1985 |
|
SU1296385A1 |
| Зубодолбежный станок с ЧПУ | 1986 |
|
SU1366360A1 |
| Устройство для автоматического контроля и управления процессом резания на станках с ЧПУ | 1984 |
|
SU1231485A1 |
| Устройство для программного управления шлифовальными станками | 1978 |
|
SU746430A1 |
| Способ управления шлифованием при работе в цикле и устройство для его осуществления | 1984 |
|
SU1204368A1 |
| СПОСОБ ОПТИМИЗАЦИИ ПРОЦЕССА МЕХАНИЧЕСКОЙ ОБРАБОТКИ С ПОСЛЕДУЮЩИМ АВТОМАТИЧЕСКИМ ОБЕСПЕЧЕНИЕМ ЗАДАННОЙ ИЗНОСОСТОЙКОСТИ РЕЖУЩЕГО ИНСТРУМЕНТА И КАЧЕСТВА ФОРМИРОВАНИЯ ПОВЕРХНОСТНОГО СЛОЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2104143C1 |
| Устройство индикации и управления для станков | 1985 |
|
SU1290262A1 |



УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШЖФОВАЛЬНЫМ СТАНКОМ, содержащее первый, второй и третий пороговые элементы, преобразователь сил резания, блок задания скорости, датчик измерения припуска, выходом подключенный к входам первого и второго пороговых элементов, выход датчика мощности привода подачи через последовательно соединенные преобразователь сил резания и третий пороговый элемент связан с первым входом блока задания скорости, выход которого подключен к первому выходу устройства, а второй вход - к выходу первого порогового элемента, отличающееся тем, что, с целью повышения быстродействия устройства, в него введены блок деления, первый блок вычитания, блок умножения, узел выделения разности сигнала. состоящий из входного и первого выходного преобразователей аналогового сигнала в дискретный, второго блока вычитания, первого элемента задержки, и узел выделе 1ия наибольшей разности сигнала, содержащий второй выходной преобразователь, третий блок вычитания, второй элемент задержки и пиковый детектор, первый вход которого подключен к выходу преобразователя сил резания и к вычитаемому входу третьего блока вычитания, вход уменьшаемого которого соединен с выходом пикового детектора, выход третьего блока вычитания подключен к первому входу (Л второго выходного преобразователя аналогового сигнала в дискретный выход которого соединен с входом делителя блока деления, второй вход второго выходного преобразователя аналогового сигнала в дискретный и вход второго элемента задершси 00 подключены к выходу блока задания ю скорости, выход второго элемента ни. задержки соединен с вторым вхосо дом пикового детектора, первый вход входного преобразователя аналогового сигнала в дискретный подключен к выходу датчика измерения припуска и к вычитаемому входу второго блока вычитания, вход уменьшаемого которого соединен с выходом входного преобразователя аналогового сигнала в дискретный, выход второго блока вычитания подключен к первому входу первого выходного преобразователя аналогового сигнала в . дискретный, выход которого соединен с первым входом блока з ножения.
1
Изобретение относится к приборостроению и может быть использовано для автоматического управления подачей шлифовального станка.
Цель изобретения - повышение быстродействия работы устройства.
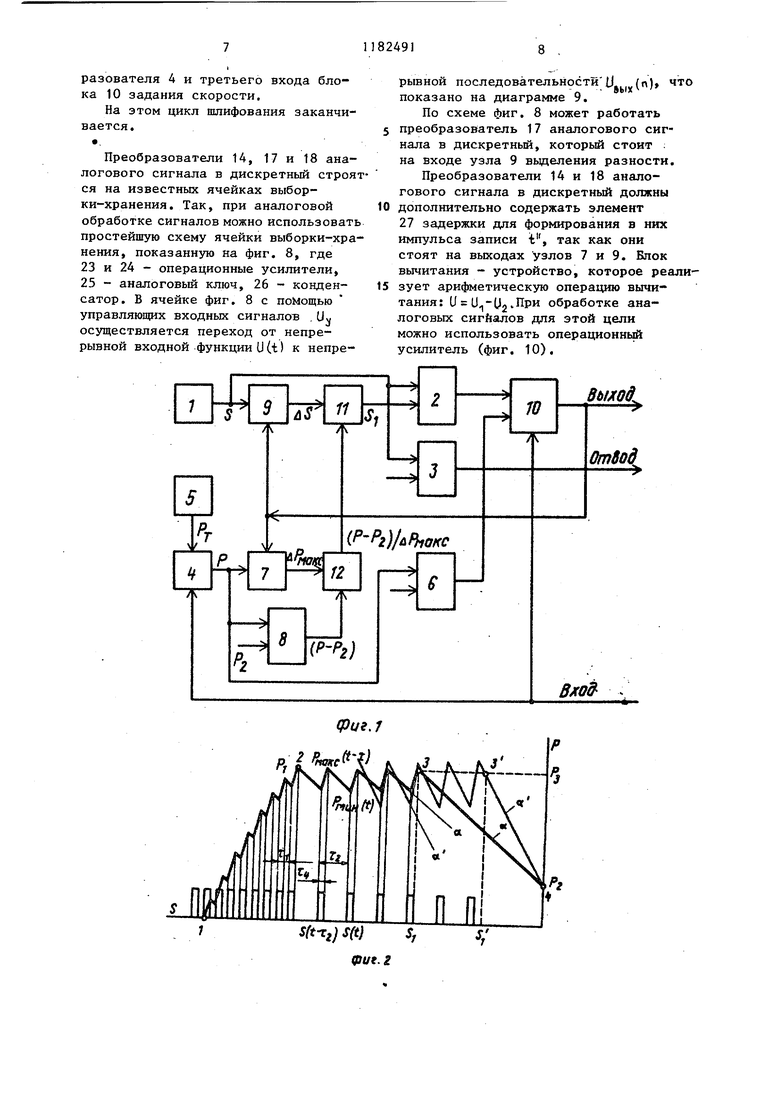
На фиг. 1 представлена схема устройства; на фиг. 2 - диаграмма цикла обработки одной детали; на фиг. 3 - узел вьщеления наибольшей разности сигнала; на фиг. 4 узел выделения разности сигнала} на фиг. 5 - преобразователь сил резания)на фиг. 6 - временные диаграммы работы преобразователя сил резания} на фиг. 7 - временные диаграммы работы узла выделения наибольшей разности сигнала; на фиг. 8схема ячейки выборки-хранения-, на фиг. 9 - временная диаграмма ее работы на фиг. 10 - схема блока вычитания.
i Устройство для управления шлифовальным станком содержит датчик 1 измерения припуска, подключенный к пороговым элементам 2 и 3, преобразователь 4 сил резания, подключенный к выходу датчика 5 мощности привода подачи. Выход преобразователя 4 подключен на входы третьего порогового элемента 6, узла 7 вьщеления наибольшей разности сигнала и первого блока 8 вычитани
На входы второго 3 и третьего 6 пороговых элементов поступают также сигналы с задатчика опорных уровней (не показан). Выход датчик
1 измерения припуска соединен с входом узла 9 вьщеления разности сигнала. Выходы пороговых элементов 2 и 6 и вход устройства подключены к входам блока 10 задания скорости, выход которого соединен с выходом устройства и с управляющими входами узлов 7 и 9. Выход узла 9 соединен с входом блока 11 умножения. Выход блока 11 умножения соединен с вторым входом порогового элемента 2. Выход узла 7 вьщеления наибольшей разности сигнала соединен с входом делителя дополнительного блока 12 деления, вход делимого которого соединен с выходом первого блока 8 вычитания. Выход блока 12 подключен к второму входу блока 11 умножения.
Узел 7 вьщеления наибольшей
разности сигнала (фиг. 3) содержит пиковый детектор 13, второй выходной преобразователь 14 аналогового сигнала в дискретный, третий блок
15 вычитания и второй элемент 16 задержки.
Узел 9 вьщеления разности сигнала (фиг„ 4) содержит входной 17 и первый выходной 18 преобразователи аналогового сигнала в дискретный второй блок 19:вычитания йпер-: вый элемент 20 задержки.
Преобразователь 4 (фиг. 5) содержит преобразователь 21 аналогового сигнала в дискретный и блок 22 вычитания . Устройство работает следующим образом. При подводе шлифовального круга к детали со станка на вход устройства поступает сигнал. В преобразо вателе 4 осуществляется запись мощ ности холостого хода Р привода подачи. Сигнал о текущей мощности Р привода подачи поступает в преобразователь 4 с выхода датчика 5, по величине равный текущей мощност привода подачи Р. При подводе шли фовального круга на управляющий вх преобразователя 21 поступает сигнал с входа устройства, с помощью которого в преобразователе 21 осуществляется запись ее входного сиг ,нала Р. Поскольку при этом мощность привода подачи Р равна мощности холостого хода Ру(обработки при подводе нет), то величина Р. „ и записывается в преобразователь 2 аналогового сигнала в дискретный (так в преобразователе 4 осуществляется запись мощности холостого хода) . Сигналы Р и Р, поступают на входы четвертого блока 22 вычитания, выходной сигнал которого (о является и выходным сигналом преобразователя 4) равен нулю. Когда круг подведен к детали, сигнал с входа устройства снимается и на выходе преобразователя 21 поддержи вается постоянный уровень РХХ Когд идет обработка, текущая мощность привода подачи Р возрастает, поэтому увеличивается и Р. образом, выходной сигнал Р преобра зователя 4 пропорционален мощности сил резания. Временные диаграммы на фиг. 6 поясняют работу преобразователя 4 сил резания. Преобразователь 4 формирует сигнал мощности сил резания Р (при подводе круга он равен нулю, так как Р РХ). Одновременно импульсы, период f которых соответствует ускоренной подаче, поступают с блока 10 задания скорости на вход устройства - на шаговый двигатель механизма подачи. При ускоренной подаче (от т.1 до т.2 на фиг. 2) круг все больше врезается в деталь и последняя сглаживается. Мощность Р сил резания возрастает, достигая заданного значения Р. (т.2 на фиг. 2). Сраба914тывает третий пороговый элемент 6, по сигналу которого блок 10 задания скорости формирует импульсы, период которых 27Т соответствует черновой подаче. На участке черновой подачи средний уровень мощности сил резания поддерживается постоянным за счет того, что идет обработка выровненной детали, а период черновой подачи 2 также постоянный. При этом мгновенная мощность колеблется между максимальным минимальным Pfn значениями (в течение действия импульса tu мощность растет от Р до течение паузы, почти равной lio длительности периоду uj падает от Р до Р), т.е. из mot X m« « rain 7 меняется на величину которая измеряется с помощью узла 7. Вьщеление сигнала Р происходит следующим образом. В момент поступления очередного импульса на управляющий вход узла 7 с выхода блока 10 задания скорости мощность сил резания равна Р,;,. На информационный вход преобразователя 14 аналогового сигнала в дискретный поступает сигнал с выхода третьего блока 15 вычитания. На вход + третьего блока 15 вычитания поступает сигнал с выхода пикового детектора 13, равный максимальному значению мощности сил резания за предьщущий период Ртс,х()Принцип работы узла 7 пояснен с помощью временных диаграмм, изображенных на фиг. 7. При черновой подаче на управляющий вход узла 7 (на элемент 16 задержки и управляющий вход второго выходного преобразователя 14 аналогового сигнала в дискретный) поступают импульсы ty, период следования которых равен iT - периоду черновой подачи. В течение периода мощность сил резания P(t) изменят«яДО Pmin (в течение пауется от Р зы )К от до (в ими от .. nllTV ...,. и). В момент начала импульпульсе 7 Uy, на выходе пикового детектора т« (-) присутствует сигнал Р равный максимальному значению мощности сил резания за предьщущий период подачи ti. Сигнал , поступает на вход + третьего блока 15 вычитания, на входе - которого 51182491 сигнал равен Р (t) PL. . Таким образом, в момент начала импульса на выходе третьего блока вычитания р -р сигнал равен разности &Р inciK mi. Ъ течение времени t этот сигнал записывается в выходной преобразователь 14 аналогового сигнала в дискретный и появляется на выходе узла 7. Затем по сигналу i с элемента 16 задержки сбрасывается пиковый де- 10 тектор 13 и узел 7 вновь подготовлен к формированию сигнала (после периода i он будет равен Р,1ду)« Таким образом, выходной сигнал третьего блока 15 вычитания, равны Pmc,x(-V - (-t m«,. писывается во второй выходной преобразователь 14 и появляется на его выходе. Через интервал времени, определяемый вторым элементом 16 задержки, осуществляется сброс пикового детектора 13 и узел 7 снова готов к выделению наибольщей разнрс за текущий перио ти сигнала подачи. За период черновой подачи Та изменяется припуск Детали на величи .ну йЗ. Изменение производится узлом 9 выделения разности сигнала «2педующим образом. В момент поступления импульса на его управляющий вход припуск равен $(Ь) . На информационный вход первого выходного преобразователя 18 аналогового сигнала в дискретный поступает сигнал с выхода второго блока 19 вычитания. На вход уменьщаемого второго блока |19 вычитания поступает сигнал с выхода входного преобразователя 17 аналогового сигнала в дискретный, равный значению припуска в нача- . ле предыдущего периода подачи 2(i--i. Таким образом, выходной сигнал второго блока 19 вычитания, равный 5(t-b2. )-5(l)ii5, записывается в выходной преобразователь 18 аналого вого сигнала в дискретный и появляется на его выходе. Через интервал времени, определяемый первым элемен том 20 задержки, осуществляется запись информации S(t) во входной прео разователь 17 аналогового сигнала в дискретный и узел 9 вновь подгото лен к вьщ(елению разности сигнала й5 за текущий период подачи. Окончание черновой подачи происходит при достижении припуском 5 значения гд бл ум (р-р.) Р - текущая мощность сил резания; р. - мощность сил резания в момент окончания обработки (она должна быть постоянной, за счет чего стабилизируется точность и качество поверхности обрабатываемых деталей). игнал S, формируется с помощью ов вычитания 8, деления 12 и жения 11, С выхода блока 11 этот сигнал поступает на вход порогового элемента 2. Когда припуск .5 достигнет величины S,срабатывает пороговый элемент 2 (т.З на фиг. 2), с блока 10 задания скорости прекращается поступление импульсов на выход устрой-ства и шлифование продолжается за счет натягов в системе СПИД (идет выхаживание). При этом снижение мощности сил резания происходит по прямой 3-4, характеризующейся коэффициентомтаким же, как и при снижении мощности за паузу между импульсами черновой подачи о1 Если жесткость системы СПИД изменится(например, увеличится по фиг.2), то коэффициент снижения мощности сил резания при шлифовании за счет натягов в системе СПИД оСбудет другим () и этап выхаживания начнется при припуске 5 oi ( Р Ра ) (в конкретном случае 5 5). При этом снижение мощности сил резания проходит по прямой 3-4, характеризующейся этим коэффициентом. Следовательно, в данной системе уровень срабатывания порогового элемента 2 автоматически устанавливается при изменениях жесткости системы СПИД с целью достижения заданной мощности Pj сил резания в момент окончания обработки. Когда сошлифовывается весь припуск 5, срабатывает пороговый элемент 3 (т.4 на фиг. 2). Выходной сигнал с Порогового элемента 3 поступает на выход устройства, осуществляется быстрый отвод шлифовального круга от детали. Одновременно снимается сигнал с управляющего входа преобразователя 4 и третьего входа блока 10 задания скорости.
На этом цикл шлифования заканчивается. ,
Преобразователи 14, 17 и 18 аналогового сигнала в дискретный строятся на известных ячейках выборки-хранения. Так, при аналоговой обработке сигналов можно использовать простейшую схему ячейки выборки-хранения, показанную на фиг. 8, где 23 и 24 - операционные усилители, 25 - аналоговый ключ, 26 - конденсатор. В ячейке фиг. 8 с помощью управляющих входных сигналов .Uu осуществляется переход от непрерывной входной функции и (t) к непреФиг,г
)S(t)
рывной последовательностиМ (п), что показано на диаграмме 9.
По схеме фиг. 8 может работать
преобразователь 17 аналогового сигнала в дискретный, который стоит на входе узла 9 вьщеления разности.
Преобразователи 14 и 18 аналогового сигнала в дискретный должны
дополнительно содержать элемент 27 задержки для формирования в них импульса записи t, так как они стоят на выходах узлов 7 и 9. Блок вычитания - устройство, которое реализует арифметическую операцию вычитания: и обработке аналоговых сигйалов для этой цели можно использовать операционный усилитель (фиг. 10).
Выходу
(put. г
фиг. 5
с Входа дстройcinSa
Запись РЛХ
eSpoScrtea
| Устройство для управления шлифовальным станком | 1981 |
|
SU1053067A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Бахтияров Г.Д.,Малинин В.В., Школин В.П | |||
| Аналого-цифровые преобразователи | |||
| Под ред.Г.Д.Бахтиярова, М., Советское радио, 1980, с | |||
| Схема обмотки ротора для пуска в ход индукционного двигателя без помощи реостата, с применением принципа противосоединения обмоток при трогании двигателя с места | 1922 |
|
SU122A1 |
| Хорович П., Хилл У | |||
| Искусство схемотехники | |||
| Пер.с | |||
| англ.М., Мир, 1983, T.I, с | |||
| СПОСОБ ДЛЯ РАДИОСНОШЕНИЙ С ПОЕЗДАМИ | 1922 |
|
SU397A1 |
