Изобретение относится к транспортированию и складированию изделий и материалов и может быть использовано для автоматического управления движением по замкнутой тра ектории распределительных конвейеров, поворотных воронок, раздаточных тележек, элеваторов и других объектов, Цель изобретения - увеличение на дежности в работе. На фиг, 1 приведена принципиальная схема устройства на семь позиций перемещения объекта; на фиг, 2 диаграмма размещения датчиков положения по замкнутому пути перемещения объекта. Устройство содержит реверсивный пускатель с обмотка; 1и 1 и 2, размыкающими контактами 1.2 и 2.1 взаимной блокировки и замыкающими контактами 1.2 и 2.2 самоблокировки, задатчик адреса, выполненный в виде переключателя с подвижным контактом 3 и неподвижными контактами 3.-3.7 датчики положения с размыкающими контактами 4.1(1-4)-4.7(1-4) и замы кающими контактами 4.1 (5,6)4г7 (5,6 ) установленные на позициях адресования замкнутой трассы (порядковый но мер контакта датчика дан в скобках ) Между вторыми выводами первых ко тактов 4.1(1) - 4.7(1) смежных датч ков положения последовательно с вто рыми контактами 4.1(2)- 4,7(2) датчиков положения включены третьи кон такты 4.1(3) - 4.7(3) датчиков, относящихся к позициям, расположенным на расстоянии, равном или близком к половине замкнутого пути объекта .(фиг.2 }. Первые выводы первых и четвертых контактов 4.1(1 ) - 4.7(1 ) и 4.1(4). 4.7(4 ) датчиков подключены к соответствующим неподвижным контактам 3.1 - 3.7 переключателя, подвижный контакт 3 которого соединен с первым вьтодом источника питания. Втор выводы четвертых контактов 4.1(4) 4.7(4) через последовательно-соединенные контакты 1.2 и 2.1 пускс1теля соединены с первым выводом обмотки 1 пускателя, а через последовательно соединенные контакты 2.2 и 1.-1 пускателя соединены с первым вьшоцом обмотки 2 пускателя. Вторые вызоды обмоток I и 2 пускателя соединены с вторым вьшодом источника питания. Точка соединения контактов 1.2 и 2.1 пускателя через контакты 4.1(5)- 4.7(5) датчиков положения соединена с первыми выводами контактов 4.1(3) - 4.7(3) своих датчиков. А точка соединения контактов 2.2 и 1.1 пускателя через контакты 4.1(6) 4.7(6) датчиков положения соединена с вторыми выводами контактов 4, 1 (3) 4.7(3)своих датчиков. Аналогично строится схема устройства на другое число позиций остановок объекта. При этом смещение между вторыми и .третьими. контактами датчиков положения выбирается с учетом фактических расстояний между позициями остановок объекта. Устройство работает следующим образом. Пусть первоначально объект находится в заданной позиции с датчиком 4.1. В переключателе (фиг.1 ) замк нуты контаисты 3 и 3.1, датчик 4.1 включен и его контакты 4.1(1)- 4.1(4) разомкнуты, а контакты 4.1(5) и 4.1(6) замкнуты.Контакты 1.2 и 2.2 пускателя разомкнуты, обмотки 1 и 2 пускателя отключены, объект неподвижен. Для. перемещения объекта, например, в позицию с датчиком 4.4 переключатель переводится р положение, в котором замыкаются его контакты 3 и 3.4. При включении источника питания образуется цепь: первый вывод источника -питания - контакты 3-3.44.4(1) - 4.4(2)- 4.U5)-2.I - обмотка 1 - второй вьшод источника питания. Обмотка 1 пускателя включается и объект начинает движение по часовой стрелке (фиг.2). Одновременно образуется дополнительная цепь через контакт 4.4(4 ) и включившийся контакт 1.2 пускателя. Обмотка 2 пускателя включиться не может, так как ее цепь разомкнута контактами 4.1(2) и 4.1(3). С уходом объекта из начальной позиции датчик 4. 1 отключается и перек-; лючаются все его контакты, но обмотка 1 пускателя не отключается, так как она питается по дополнительной цепи. Объект продолжает движение. Когда объект приходит в заданную .позицию, включается, датчик 4.4, контакты 4.4(1 I и 4.4(4) размыкаются.
обмотка 1 отключается, объект останавливается.
Для, перемещения объекта из первоначальной позиции с датчиком 4.1 например, в позицию с датчиком 4.6в переключателе замыкаются его контакты 3 и 3,6. При этом образуется цепь: первый вывод источника питания - контакты 3-3.6-4.6(1)-4.2(3)A.5(2 М. 1 (6Ы,1 - обмотка 2 - ВТОрой вывод источника питания. Включается обмотка 2 пускателя и объект начинает перемещение против часовой стрелки (фиг.2). Одновременно обмот186560 4
ка 2 получает питание по дополнительной цепи через контакты 4.6(4J и 2.2.
Когда объект приходит в позицию 5 с датчиком 4,6, его контакты 4.6(I) и 4.6(4 ) размыкаются, обмотка 2 отключается, объект останавливается, придя в заданную позицию, как и в предьщущем случае, кратчайшим путем.
0 Аналогично работает устройство и при других исходных позициях объекта, обеспечивая его перемещение в люС5ую задаваемую позицию кратчайшим путем.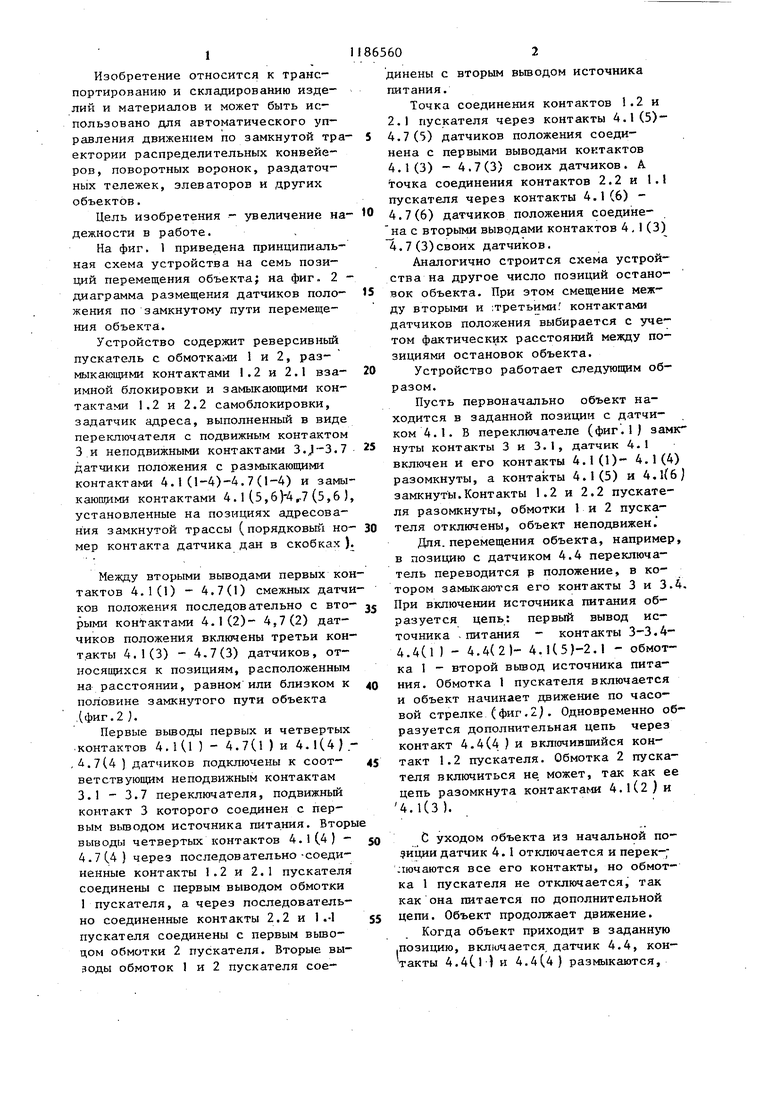
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического выбора направления движения объекта | 1987 |
|
SU1472393A1 |
| Устройство для автоматического выбора направления движения объекта | 1982 |
|
SU1096169A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1980 |
|
SU943149A2 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1986 |
|
SU1357321A1 |
| Устройство для позиционного управления объектом | 1986 |
|
SU1371955A1 |
| Устройство для автоматического адресования объекта | 1985 |
|
SU1273316A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1987 |
|
SU1456348A1 |
| Устройство для автоматического выбора направления движения объекта | 1984 |
|
SU1164166A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1983 |
|
SU1137033A1 |
| Устройство для автоматического выбора направления движения объекта | 1985 |
|
SU1263598A1 |

УСТРОЙСТВО ДЛЯ-УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ОБЪЕКТА ПО КРАТЧАЙШЕМУ ПУТИ, содержащее датчики положения, из которых каждый установленный на предыдущей позиции адресования замкнутой трассы одним из выводов соединен через размыкающий контакт среднего по отношению к нему датчика положения с одним из вьтодов соответствующего разделительного элемента, подключенного другим выводом к одному из выводов размыкающего контакта датчика положения.последующей позиции адресования, задатчик адреса и реверсивный пускатель, одни из вьшодов обмоток которого соединены с одним из выводов источника питания, отличающееся тем, что, с целью увеличения надежности в работе, датчики положения снабжены дополнительными замыкающими и размыкающими контактами, реверсивный пускатель снабжен замыкающими контактами самоблокировки и размыкающими контактами взаимной блокировки, задат- чик адреса выполнен в виде переключателя с одним подвижным и неподвижными контактами по числу позиций адресования, а разделительный элементв виде одного из дополнительных размыкающих контактов датчика положения последующей позиции сщресования и подключен первым вьюодом к одному из выводов дополнительного замыкающего контакта зтого же датчика положения, а другим вьводом к одному из выводов другого дополнительного размыкающего контакта среднего по отношению к С нему датчика положения, другой вывод которого и один из выводов третьего дополнительного размыкающего контакта этого же датчика положения соединены с соответствующим неподвижным контактом переключателя, подСХ) ключенного подвижным контактом к дру 05 ел гому выводу источника питания, другие вьтоды третьих дополнительных раз О) мыкающих контактов датчиков положения подключены к одним из выводов замык иощих контактов самоблокировки реверсивного пускателя, другие выводы которых, зак ыкаюишх контактов и дополнительных замыкающих контактов датчиков положения под.;лючены соответственно, через размыкающие контакты взаимной блокировки к другим выводам обмоток реверсивного пускателя .
| Устройство для автоматическогоупРАВлЕНия дВижЕНиЕМ Об'ЕКТА | 1979 |
|
SU839922A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для автоматического вы-бОРА НАпРАВлЕНия дВижЕНия Об'ЕКТА | 1979 |
|
SU819018A2 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
