1
Изобретение относится к промьш- ленному транспорту и может быть использовано для управления .различными подвижньши объектами на трассах с фиксационными позициями,
Цель изобретения повышение надежности.
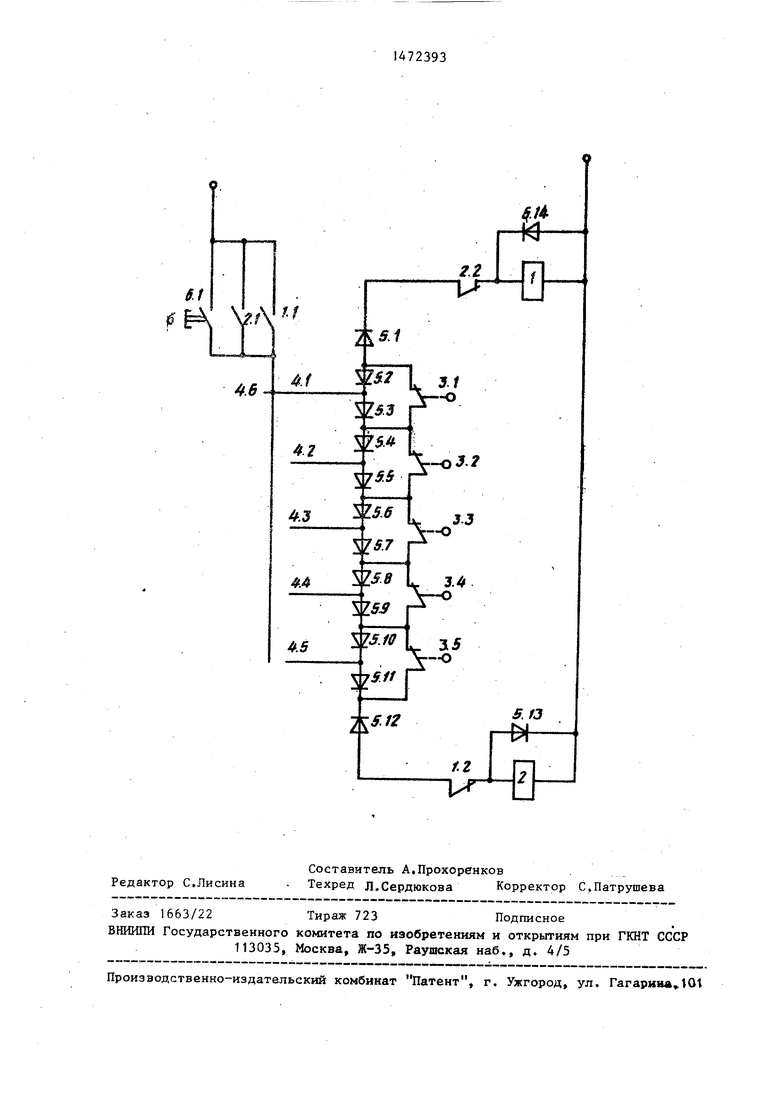
На чертеже изображена принципиальная схема предлагаемого устройства на пять положений объекта.
Устройство содержит реверсивный пускатель с обмоткой 1, замыкающим контактом 1,1 и размыкающим контактом 1.2 и обмоткой 2, замыкакнцим контактом 2,1 и размыкающим контактом 2с2, датчики положения объекта с размыкаю ; щими контактами 3.1 - 3.5, позицион-. ный распределитель, секция которого включает неподвижные контакты 4.1 - 4,5 и подвижный контакт 4,6, диоды 5,1 - 5,14, пусковой аппарат 6,- с
(Л С
замыкающим контактом 6,1. Неподвижные контакты 4,1 - 4.5 позиционного распределителя подключены соответственно. к,средней точке каждой пары диодов 5.2 - 5.3, 5.4 - 5.5, 5.6 - 5.7, 5.8 - 5,9, 5.10 -5,11, каждая пара диодов соединена параллельно с одним из размыкающих контактов, соединен- ными последовательно 3.1 - 3.5, которые через диоды 6.1; 5.12 и размыкающие контакты 1,2 и 2.2 подключены к одним из выводов обмоток 1 и 2 реверсивного пускателя, другой вывод которых соединен с одним из выводов источника питания переменного тока. Для устранения дребезга контактов параллельно обмоткам 1 и 2 подключены диоды 5,13 и 5.14, Подвижный контакт 4.6 позиционного распределителя подключен к одним выводам параллельно соединенных замыкающих контактов 6,1
1,1 и 2.1 соответственно пусковой кнопки и реверсивного пускателя, лругие выводы замыкаюцчх контактов 5,1 и 5,12 2,1 подключены к другому выводу источника питания переменного тока.
Устройство работает следующим образом. . Предположим, что объ ект находится на первой позиции, где он взаимодействует с датчиком положения, контакт , которого 3 разомкнут. Если позици- онный распределитель, которым зада- ется адрес, установлен также в первое положение, т,е, контакт 4.1 замкнут, реверсивный пускатель не включается, и объект остается неподвижным, так как обмотки 1 и 2 реверсивного пускателя заперты диодами 5,1, 5,2, и 5,3, 5,12 соответственно. Состояние пускового аппарата не отражается на останове объекта. Для перемещения объекта, например, на четвертую позиг цию, которую фиксирует датчик положе ВИЯ с раз Ф1кающим контактом 3.4, необходимо позиционный распределитель установить в четвертое положение и тем самьш замкнуть контакт 4,6 и 4,4, Пр и воздействии на пусковой аппарат обк отка 2 реверсивного пускателя под ключается к источнику питания по цепи: обмотка 2 - контакт 1,2, диод 5,12 - контакты 3,5 - 3,4 - диод 5,8 - контакты 4.4 - 4.6 - 6,1 - реверсивный пускатель включается, самоблокируется замыкающим контактом 2,1 и объект перемещается к четвер- , той позиции. При достижении заданной четвертой позиции объект воздействует на датчик положения. Его размы
-
Q 5 Q 5 о л
5
кающий контакт 3-,4 , размыкается, диод 5,9 запирает обмотку 2, реверсивный пускатель отключается, и объект останавливается. Аналогичным образом объект перемещается на любую другую позицию, заданную позиционным распределителем.
Формула изобретения
Устройство для автоматического выбора направления движения объекта содержащее позиционный распределитель подвижный контакт которого подключен к одним из выводов за№1ка -з даго кон-- такта пускового аппарата и первого замыкающего контакта реверсивного пускателя, другие вывода которых со-- единены с первым выводом источники питания , обмотки реварсивного пуска- телч одними выводами подключены к второму выводу источника питания, а другими - к одним из выводов размьша- гацих контактов взаимной блокировки, и установленные на трассе датчики положения с соединенными последова- .тельно размыкающими контактами, отличающееся тем, что, с целью повышения надежности, оно Снабжено диодами ,через одни из которых неподвижные контакты позиционного распределителя подключены к размыкающим контактам соответствуюпдах датчиков положения., соединенные через, другие диоды с другими выводами размыкающих контактов взаимной блокировки реверсивного пускателя, второй замыкающий контакт которого подключен параллельно первому, третьи диоды подключены параллельно обмоткам ре- верривного пускателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического выбора направления движения объекта | 1982 |
|
SU1096169A1 |
| Устройство для управления перемещением объекта по кратчайшему пути | 1984 |
|
SU1186560A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1983 |
|
SU1137033A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1987 |
|
SU1456348A1 |
| Устройство для автоматического выбора направления движения объекта | 1988 |
|
SU1509316A1 |
| Устройство для автоматического выбора направления движения полок элеваторного стеллажа по кратчайшему пути | 1983 |
|
SU1148825A2 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1987 |
|
SU1475874A1 |
| Устройство для управления реверсивным электроприводом | 1981 |
|
SU993209A1 |
| Устройство для автоматического выбора направления движения объекта | 1989 |
|
SU1669827A1 |
| Устройство для автоматического управления движением подъемника | 1986 |
|
SU1355580A1 |
Изобретение относится к области промышленного транспорта и может быть использовано для управления различного рода подвижными объектами. Цель изобретения - увеличение надежности. Устройство содержит позиционный распределитель, включенный через диоды и размыкающие контакты установленных на трассе датчиков положения в цепь питания обмоток реверсивного пускателя с разделяющими диодами. В зависимости от заданной позиционным распределителем позиции и фактическим положением объекта включается соответствующая обмотка реверсивного пускателя. Объект в выбранном направлении перемещается на заданную позицию. При взаимодействии с установленным на ней датчиком положения осуществляется останов объекта. 1 ил.
| Устройство для автоматического выбора направления движения объекта | 1977 |
|
SU640927A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для автоматического выбора направления движения объекта | 1982 |
|
SU1096169A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
