Изобретение относится к машиностроению и может быть использовано при создании автоматических линий обработки деталей мелкосерийного про изводства.
Целью изобретения является расширение технологических возможностей устройства путем использования для загрузки деталей различных типов пу- тем замены автоматической смены схватов в процессе работы загрузочного устройства.
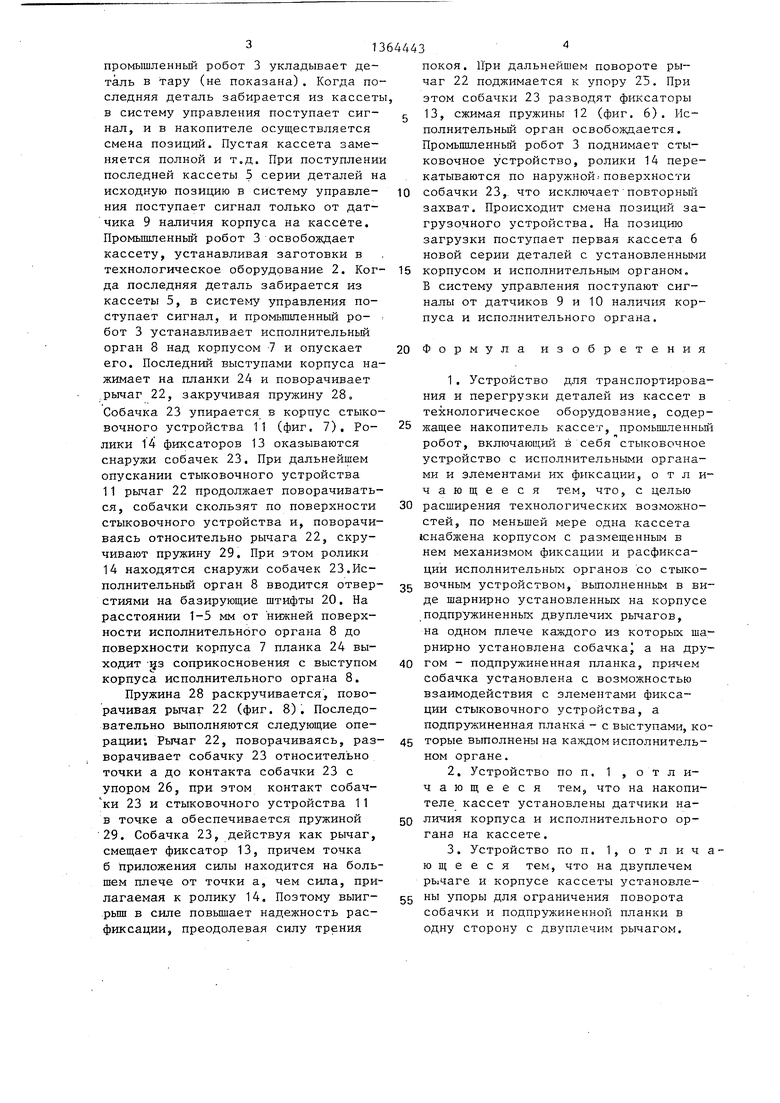
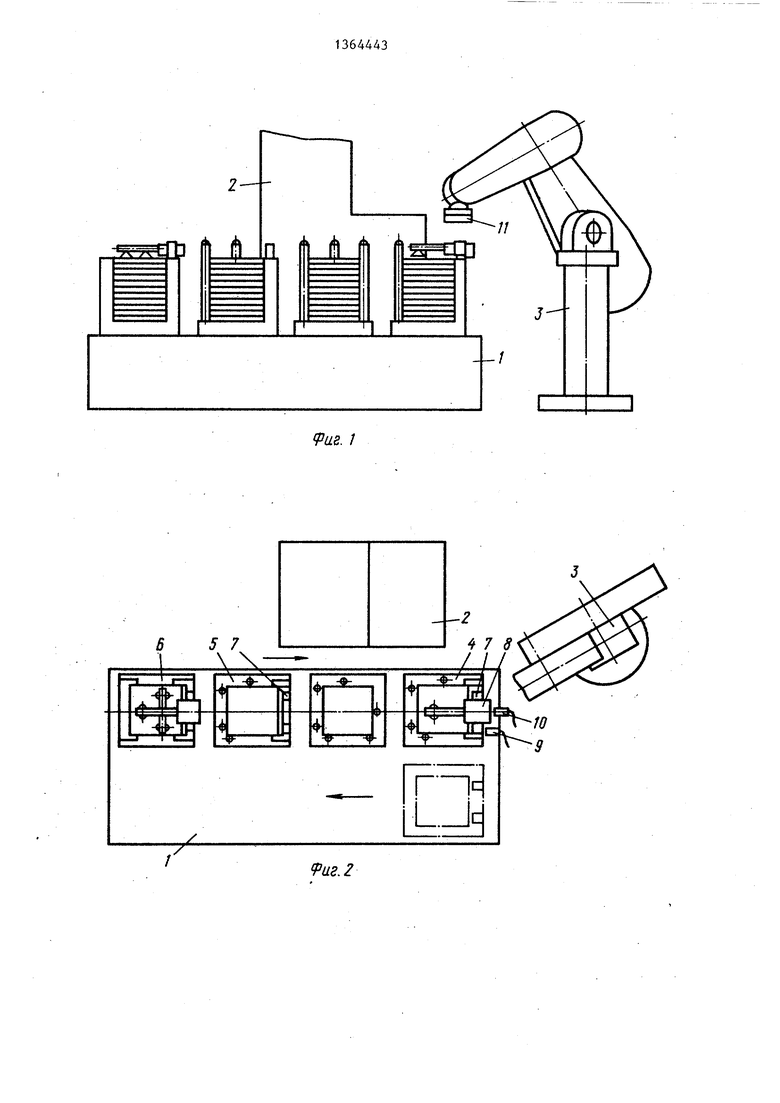
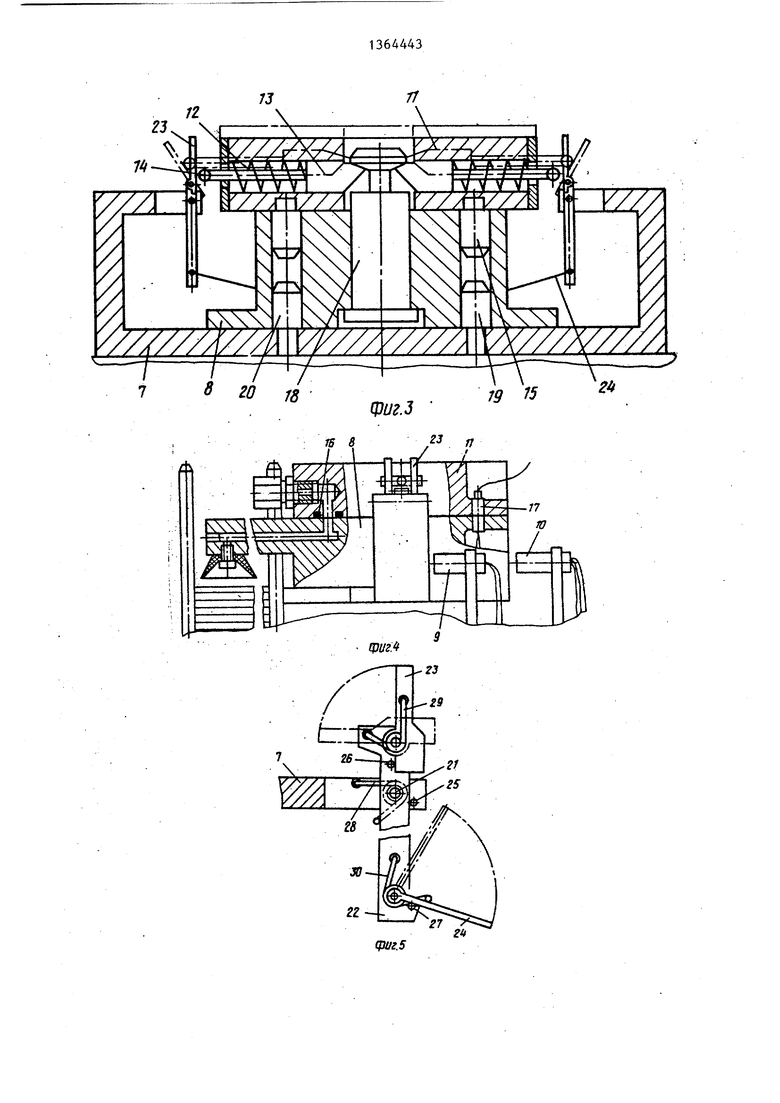
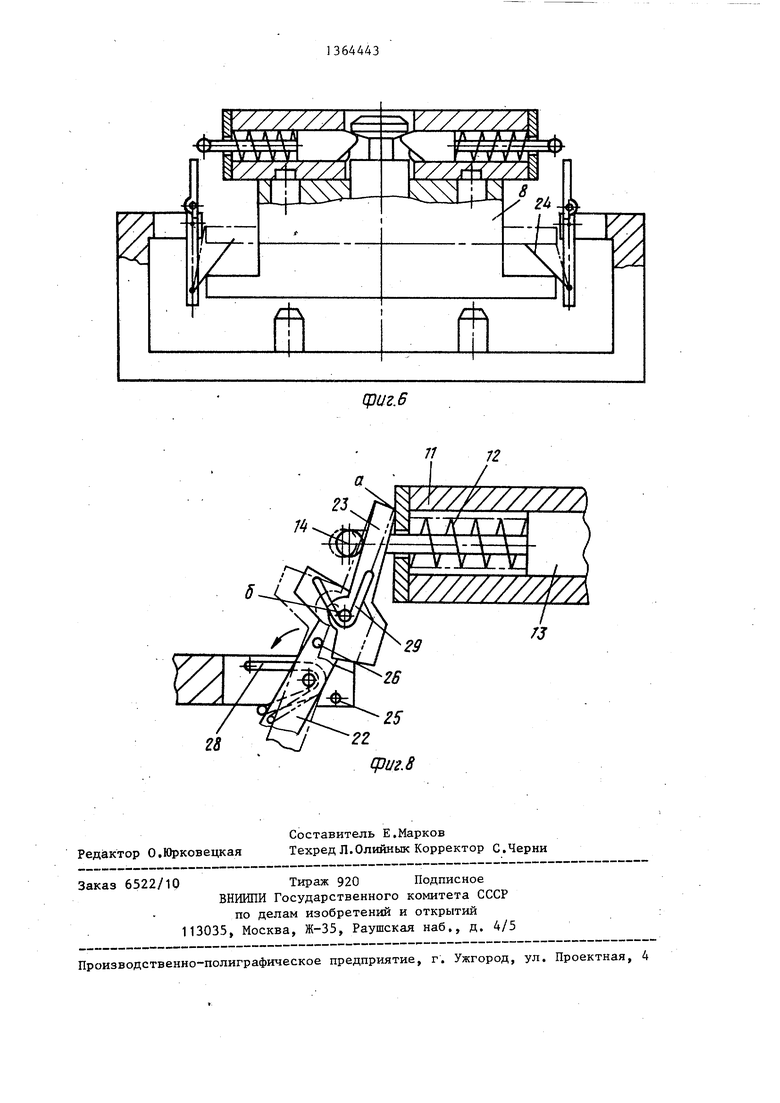
На фиг, 1 изображено устройство для транспортирования и перегрузки деталей из кассет; на фиг, 2 - то же план; на фиг, 3 - схема фиксации ис- полнительного органа со стыковочным устройством; на фиг, 4 - кассета с деталями и исполнительным органом, установленным на стыковочном устройстве; на фиг, 5 схема конструктивного вьшолнения двуплечего рычага; на фиг. 6 - схема извлечения исполнительного органа из корпуса кассеты на фиг, 7 - схема установки исполнительного органа в корпус кассеты; на фиг, 8 - принцип действия расфиксаци стыковочного устройства.
Устройство содержит накопитель 1 кассет, технологическое оборудование 2, например станок с ЧПУ или пресс, и промьшшенный робот 3, Накопитель 1 включает кассеты 4 - 6 с деталями различных типоразмеров, .
На первой кассете 4 серии деталей подлежащих загрузке в технологическое оборудование 2, устанавливается корпус 7 с исполнительным органом 8, а на последней кассете серии - кор- пус 7 без исполнительного органа. Накопитель 1 снабжен датчиками 9 наличия корпуса 7 и датчиками 10 наличия исполнительного органа. На промышленном, роботе 3 размещено стыко- вочное устройство 11, в корпусе которого установлены подпружиненные пружиной 12 фиксаторы 13, Последние снабжены роликами 14, В стыковочном устройстве 11 установлены базовые пальцы 15, уплотнение 16 и часть электрического разъема 17, В корпусе исполнительного органа 8 жестко установлен штырь 1В, который имеет кольцевую канавку для взаимодействия с фиксаторами 13 стыковочного устройства 11, и ответная часть электроразъема 17, На корпусе 7 закреплены базирующие штифты 19 и 20 и установлены на оси 21 двуплечие рычаги 22, на концах которых с возможностью поворота установлены собачки 23 и планки 24, В корпусе 7 и на двуплечем рычаге 22 установлены упоры 25 -27, ограничивающие поворот двуплечих рычагов и планок соответственно. При этом направление поворота собачки 23 и планки 24 противоположно направле нию поворота рычага 22, Пружины 28 - 30 обеспечивают в исходном положении поджатие рычага 22, собачки 23 и планки 24 к упорам 25-27 соответ- (Ственно,
Устройство работает следующим об- iразом.
Кассета 4 с установленным корпу- сом 7 и исполнительным органом .8 поступает по накопителю 1 на исходную позицию. От датчиков 9 и 10 поступают сигналы в систему управления (не показана), Промьшшенный робот 3 поворачивается, устанавливает стыковочное устройство 11 над исполнительным органом 8 и опускает его. Базовые пальцы 15 стыковочного устройства 11 входят в отверстия исполнительного органа 8 (фиг, 3), Фиксаторы 13, наезжая нижним скосом на штырь 18, расходятся в стороны, сжимая пружины 12 (пунктир на фиг,3) при этом ролики 14, воздействуя на собачки 23, поворачивают их, скручивая пружину 29 (фиг, 3 и 5), При дальнейшем движении вниз стыковочного устройства 11 фиксаторы под действием пружин 12 входят верхним скосом в кольцевую канавку штьфя 18, выбирая зазоры между стыковочным устройством 11 и исполнительным органом 8, сжимая уплотнение 16, Электрический разъем 17 соединяется с ответной частью в исполнительном органе 8,
Промышленный робот 3 поднимает зафиксированный исполнительный орган 8, который своими выступами поворачивает планку 24 (фиг,6), закручивая пружину 30, При подъеме выступы корпуса исполнительного органа 8 выходят из соприкосновения с планками 24 и последние пружинами 30 возвращаются в исходное положение, Промышленный робот 3 устанавливает исполнительный орган 8 над кассетой 4, опускает его, захватывает деталь и устанавливает последнюю в приемное устройство,По окончании обработки
промышленный робот 3 укладывает деталь в тару (не показана). Когда последняя деталь забирается из кассет в систему управления поступает сигнал, и в накопителе осуществляется смена позидий. Пустая кассета заменяется полной и т.д. При поступлени последней кассеты 5 серии деталей н исходную позидию в систему управления поступает сигнал только от датчика 9 наличия корпуса на кассете. Промышленный робот 3 освобождает кассету, устанавливая заготовки в технологическое оборудование 2. Когда последняя деталь забирается из кассеты 5, в cиcтe ry управления поступает сигнал, и промьшшенный ро- бот 3 устанавливает исполнительньй орга 8 над корпусом 7 и опускает его. Последний выступами корпуса нажимает на планки 24 и поворачивает рычаг 22, закручивая пружину 28. Собачка 23 упирается в корпус стыковочного устройства 11 (фиг, 7), Ролики 14 фиксаторов 13 оказываются снаружи собачек 23, При дальнейшем опускании стыковочного устройства 11 рычаг 22 продолжает поворачиваться, собачки скользят по поверхности стыковочного устройства и, поворачиваясь относительно рычага 22, скручивают пружину 29, При этом ролики 1Д находятся снаружи собачек 23,Исполнительньй орган 8 вводится отверстиями на базирующие штифты 20, На расстоянии 1-5 мм от нижней поверхности исполнительного органа 8 до поверхности корпуса 7 планка 24 выходит -цз соприкосновения с выступом корпуса исполнительного органа 8,
Пружина 28 раскручивается, поворачивая рычаг 22 (фиг, 8), Последовательно выполняются следующие операции; Рычаг 22, поворачиваясь, разворачивает собачку 23 относительно точки а до контакта собачки 23 с упором 26, при этом контакт собач- ки 23 и стыковочного устройства 11 в точке а обеспечивается пружиной 29, Собачка 23, действуя как рычаг, смещает фиксатор 13, причем точка б приложения силы находится на большем плече от точки а, чем сила, прилагаемая к ролику 14, Поэтому выиг- рьш1 в силе повьш1ает надежность рас- фиксаций, преодолевая силу трения
покоя. При дальнейшем повороте рычаг 22 поджимается к упору 25. При этом собачки 23 разводят фиксаторы 13, сжимая пружины 12 (фиг. 6). Исполнительный орган освобождается, Промьшшенный робот 3 поднимает стыковочное устройство, ролики 14 перекатываются по наружной-- поверхности собачки 23,- что исключает повторньш захват. Происходит смена позиций загрузочного устройства. На позицию загрузки поступает первая кассета 6 новой серии деталей с установленными корпусом и исполнительным органом. В систему управления поступают сигналы от датчиков 9 и 10 наличия корпуса и исполнительного органа.
20 Формула изобретения
5
1,Устройство для транспортирования и перегрузки деталей из кассет в технологическое оборудование, содержащее накопитель кассет, промышленньм робот, включающий в себя стыковочное устройство с исполнительными органами и элементами их фиксации, отличающееся тем, что, с целью расширения технологических возможностей, по меньшей мере одна кассета гснаблсена корпусом с размещенным в нем механизмом фиксации и расфикса- ции исполнительных органов со стыковочным устройством, вьшолненным в виде шарнирно установленных на корпусе подпружиненных двуплечих рычагов,
на одном плече каждого из которых шарнирно установлена собачка а на другом - подпружиненная планка, причем собачка установлена с возможностью взаимодействия с элементами фиксации стыковочного устройства, а подпружиненная планка - с выступами, которые выполнены на каждом исполнительном органе.
2,Устройство по п. 1 , отличающееся тем, что на накопителе кассет установлены датчики наличия корпуса и исполнительного органа на кассете.
0
5
0
5
0
3, Устройство по п. 1
о т л и ч а
ю щ е е с я тем, что на двуплечем рычаге и корпусе кассеты установлены упоры для ограничения поворота собачки и подпружиненной планки в одну сторону с двуплечим рычагом.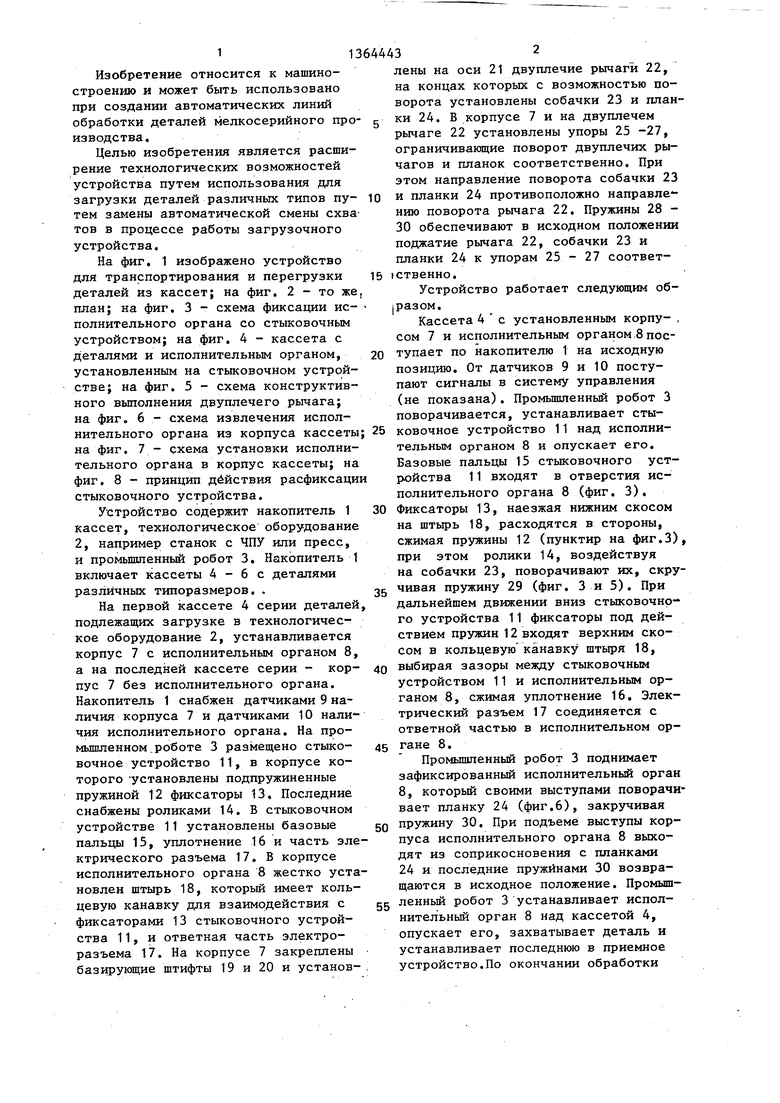
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ДЕТАЛЕЙ С НАКОПЛЕНИЕМ ИХ В КАССЕТАХ | 2015 |
|
RU2604161C2 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Станок для сборки узлов запрессовкой | 1978 |
|
SU745642A1 |
| Устройство для хранения и распределения деталей при сборке часового механизма | 1977 |
|
SU905795A1 |
| Промышленный робот | 1983 |
|
SU1155334A1 |
| Устройство для маркировки и укладки дискообразных изделий | 1987 |
|
SU1504167A1 |
| Стыковочное устройство | 1990 |
|
SU1785894A1 |
| Транспортер-накопитель | 1977 |
|
SU716922A1 |
| Стыковочное устройство | 1984 |
|
SU1202877A1 |
| Роботизированный технологический комплекс | 1986 |
|
SU1449315A1 |
Изобретение относится к области машиностроения и может быть использовано при создании автоматических линий обработки деталей мелкосерийного производства. Цель изобретения- расширение технологических возможностей устройства путем использования для загрузки деталей различных типов путем замены автоматической смены схватов в процессе работы загрузочного устройства. По крайней мере одйа кассета накопителя снабжена корпусом 7 с исполнительным органом 8. Промьшшенньй робот устанавливает стыковочное устройство 11 над исполнительным органом 8 и опускает его. Базовые пальцы 15 стыковочного устройства 11 входят в отверстия исполГГ ГЗ нительного органа 8 и фиксируются в нем фиксаторами 13. Промыпшенный робот поднимает зафиксированный исполнительный орган 8 и производит разгрузку деталей из кассет, например, вакуум-присоской, которой снабжен исполнительньй орган 8. Смена исполнительного органа 8 производится следующим образом. Промышленный робот опускает исполнительный орган 8 в корпус 7 кассеты. Орган 8 выступами своего корпуса нажимает на планку 24 и поворачивает рычаг 22, закручивая пружину. Собачка 23 упирается в корпус стыковочного устройства 11. Ролики 14 фиксатора 13 оказываются снаружи собачек 23. При дальнейшем опускании стыковочного устройства 11 рычаг 22 продолжает пово- рачиватьсй, собачки скользит по поверхности стыковочного устройства, скручивают пружину. Исполнительный орган 8 вводится отверстиями на базирующие штифты 20. При этом собачки 23 выводят фиксаторы 13 со скосов штырей 18 и промьшшенный робот освобождается от исполнительных органов. 2 з.п. ф-лы, 8 ил. а (Л со О) 4ib 4 4ib 00 гг Фиг 7
fpus. 1
Риг. 2
23
2Z
п
28
(риг.6
п
72
////////77Л
у/////7//}л
29
/J
г5
сриг.8
| Переналаживаемая роботизированная система | 1981 |
|
SU998097A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
