I
Изобретение относится к автома тизации производственных процессов и предназначено для шагового перемещения и фиксации преимущественно легких изделий по позициям в автоматических линиях.
Цель изобретения - расширение технологических возможностей.
На фиг. изображена передняя часть устройства, вид сбоку; на фиг.2 то же, вид сверху; на фиг.З- разрез А-А на фиг.2; на фиг.А - разрез на фиг.2; на фиг..5 - разрез В-В на фиг. 4; на фиг. 6 --.положение изделия перед фиксацией его в конце рабочего хода штанги; на фиг.7 - положение зафиксированного изделия при исходном положении штанги в конце ее холостого хода.
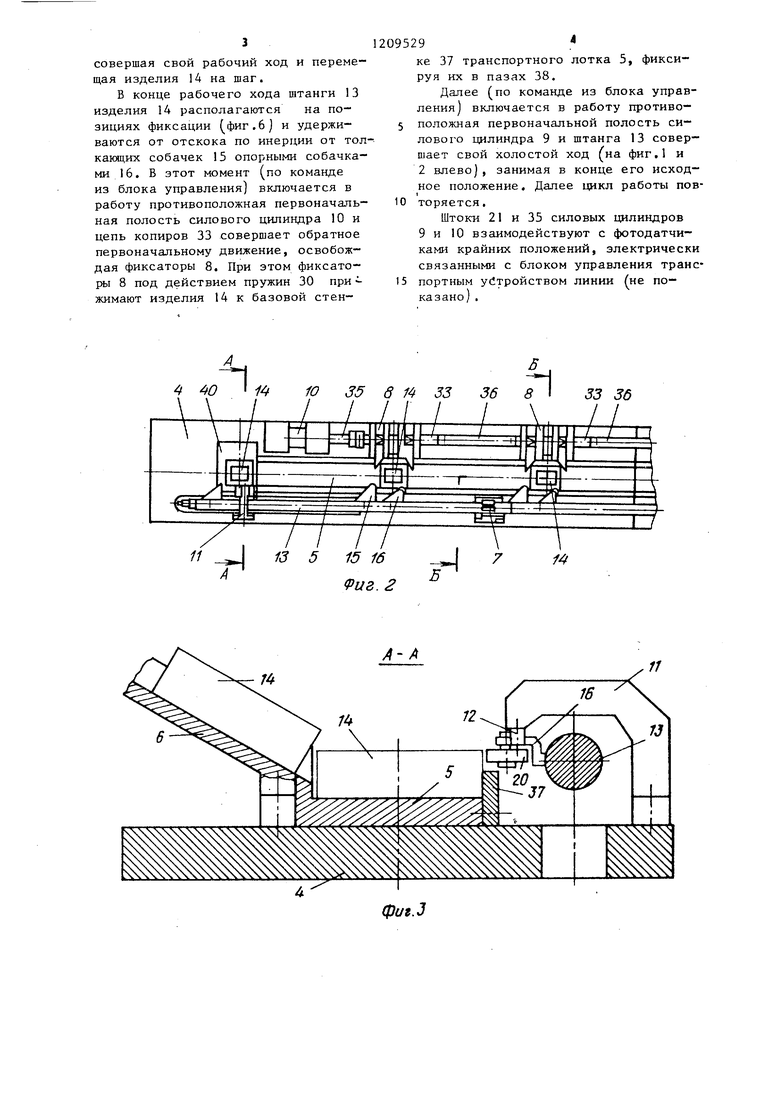
Устройство выполнено из отдельных секций. На станине 1 автоматической линии, на стойках 2 и 3, закреплены тшить 4, являющиеся основанием устройства. На плитах 4 уста новлены транспортный лоток 5, состоя щий из отдельных секций, лоток-накопитель 6, роликовые опоры 7, фиксаторы 8, силовые цилиндры 9 и 10 и стойка 11 с упором 12 (фиг.З).
В роликовых опорах 7 установле™ на штанга 13 с возможностью возвратно-поступательного движения в направлении транспортирования изделий 14, снабженная толкающими собачками 15 и опорными собачками 16, установленными перед толкающиг-т; собачками 15 на расстоянии, равном раз меру транспортируемого изделия .. 14. Собачки 15 и 16 установлены в пазах штанги 13 шарнирно на осях 17;, подпружинены пружинами 18 и опираются на штифты 19. Каждая опорная собачка 16 снабжена роликом 20j контак- тирую и 1м с транспортируемым изделием 14 для уменьшения трения с коитак тируни ей поверхностью транспортируемого изделия. Штанга 13 связана со штоком 21 силового идлиндра 9 с помощью ползуна 22, установленного на скалке 23, закрепленной в стойках 24
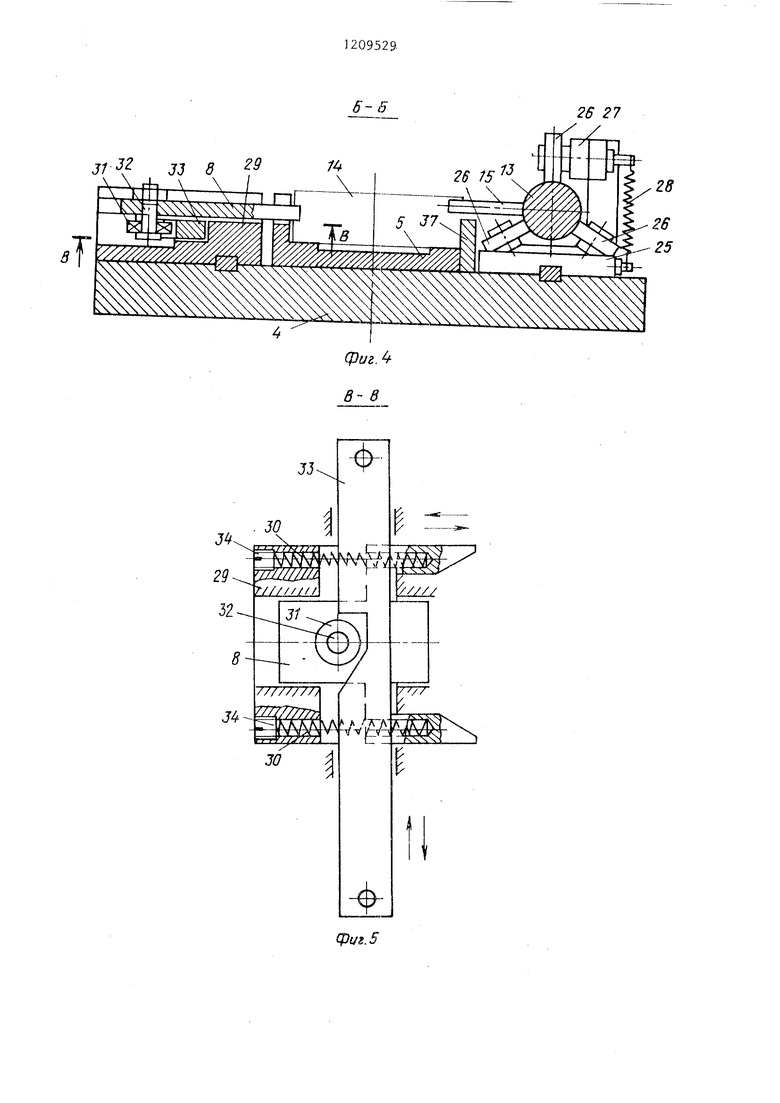
Каждая роликовая опора 7 выполнена в виде стойки 25, снабженной роликами 26. Причем верхний ролик 26 установлен на коромысле 27 и подпру жинен к штанге 13 пружиной 28, Каждый фиксатор 8 установлен в корпусе 29 с возможностью возвратно-посту пательног о перемещения в направлении
25
095292
перпендикулярном направлению транспортирования изделий 14, снабжен пружинами 30 и роликом 31, установленным на оси 32, Кроме того, в корпу-
5 се 29 установлен копир 33 с возможностью возвратно-поступательного пе ремещения в направлении, параллельном направлению транспортирования изделий 14. Копир 33 при своем дви10 женин взаимодействует с роликом 3.
Натяжерше пружин 30 регулируется резьбовыми пробками 34,
Все копиры 33 соединены последовательно между собой и со штоком 35
15 силового цилиндра 10 с помощью шарнирных звеньев 36.
Базовая стенка 37транспортного лотка 5 на местах фиксации изделий 14 снабжена пазами 38 с заходными скоса™
20 ми 39 для базирования изделий 14 относительно фиксаторов (пазы 38 имеют длину, равную размеру транспортируемого изделия, и глубину 155-2 мм).Стойка 11 с упором 12, выполненным, например, в виде штифта, установлена на плите 4 в месте 40 загрузки изделий 14 с возможностью взаимодействия упора.12 с первой опорной собачкой 16 в ис-
30 ходном положении штанги 13 (крайнее положение штанги перед началом ее рабочего хода, на фиг.1 и 2 - крайнее левое положение .
Устройство работает следуюш 1М
образом.
Штанга 13 находится в исходном положении (крайнее левое положение, фиг,1 и 2). При этом первая опорная собачка 16 отклонена из зоны транспортного лотка 5 упором 12 и .очередное изделие 14 беспрепятственно западает в транспортный лоток 5 из лотка-накопителя 6 на первую пози- 1даю, По сигналу из блока управления (не показано) включается в работу силовой одлиндр Ш, и шарнирная цепь копиров 33, взаимодействующая с роликами 31, перемещается параллельно направлению транспортирования изделий 14 (на фиг.5 вверхJ. При этом фиксаторы 8, сжимая пружины 30, освобож дают на прзициях изделия 14.
Дгшее (по команде из блока управления.) включаетсй в работу силовой цилиндр 9 и штанга 13 перемещается параллельно линии транспортирования изделий 14 (на фиг. 1 и 2 вправо,
40
45
50
55
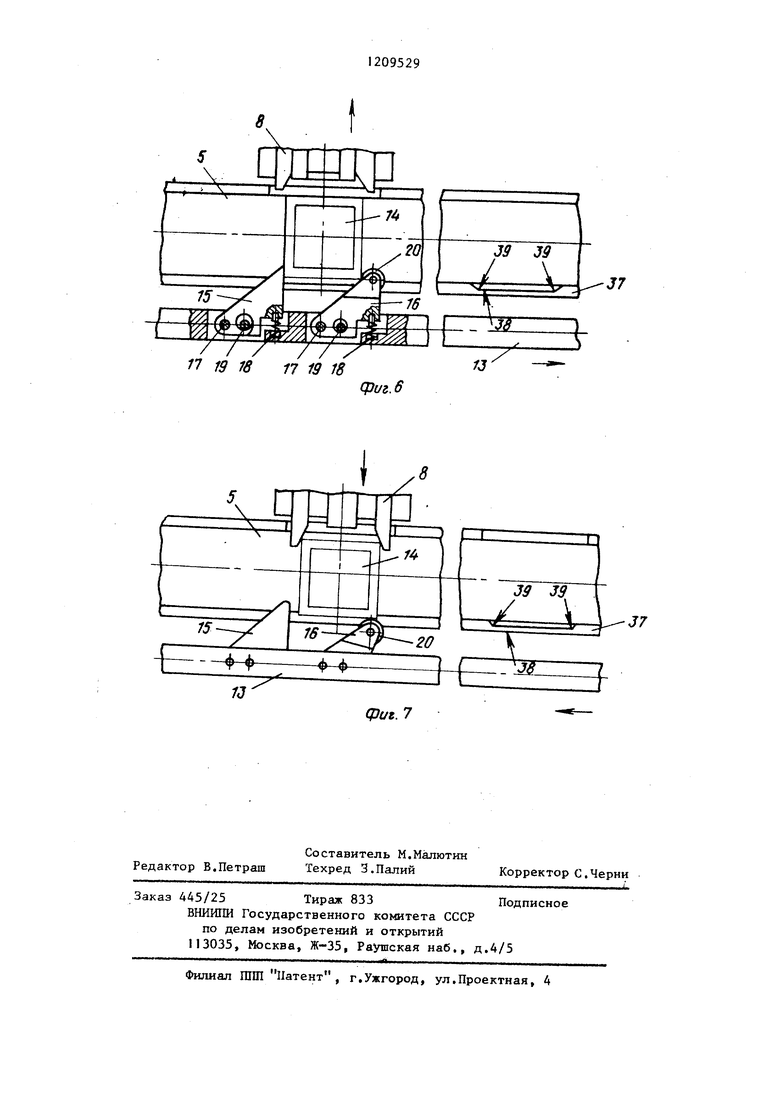
совершая свой рабочий ход и перемещая изделия 1А на шаг.
В конце рабочего хода штанги 13 изделия 14 располагаются на позициях фиксации (фиг.6) и удерживаются от отскока по инерции от толкающих собачек 15 опорными собачками 16. В этот момент (по команде из блока управления включается в работу противоположная первоначальная полость силового цилиндра 10 и цепь копиров 33 совершает обратное первоначальному движение, освобождая фиксаторы 8. При этом фиксаторы 8 под действием пружин 30 при жимают изделия 14 к базовой стен-
09529
ке 37 транспортного лотка 5, фиксируя их в пазах 38.
Далее (по команде из блока управления включается в работу противо-
5 положная первоначальной полость силового цилиндра 9 и штанга 13 совершает свой холостой ход (на фиг,1 и 2 влево, занимая в конце его исходное положение. Далее цикл работы пев10 торяется.
Штоки 21 и 35 силовых цилиндров 9 и 10 взаимодействуют с фотодатчи- ками крайних положений, электрически связанными с блоком управления транс15 портным устройством линии (не показано .
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1979 |
|
SU846437A1 |
| Устройство для контроля и сортировки сердечников | 1980 |
|
SU895552A1 |
| Гибкий производственный модуль для резки заготовок из прутков круглого и квадратного проката | 1986 |
|
SU1431915A1 |
| Сборочная линия | 1985 |
|
SU1255352A1 |
| Линия для сборки узлов | 1989 |
|
SU1722771A1 |
| Бак для термообработки коротких цилиндрических деталей | 1985 |
|
SU1323587A1 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ ПРОФИЛЬНЫХ КАНАВОК НА ПОЛЫХ ЦИЛИНДРИЧЕСКИХ ЗАГОТОВКАХ | 1993 |
|
RU2049577C1 |
| Полуавтомат для нанесения стачивающих и отделочных строчек на детали и узлы швейных изделий | 1961 |
|
SU140673A1 |
| Автомат для контроля и сортировки цилиндрических деталей | 1987 |
|
SU1443978A1 |
| Автоматическая линия спутникового типа | 1991 |
|
SU1784445A1 |

40
1
10 35 8 /4 JJ
/III
13 5 15 16 Риг. 2
.
36 8
I
33 36
и
7
/«
А- А
X
/;
фиг.З
6- s
26 27
ш,.5
(puz.6
С
5;
- p
4-f
4-4
/
f4
J9 J9
20
r
ТЖ
Редактор В.Петраш
Составитель М.Малютин
Техред 3.Палий Корректор С.Черни
Заказ 445/25 Тираж 833Подписное
ВНИИГШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Филиал ППП Патент, г.Ужгород, ул.Проектная, 4
Cput.7
| 1964 |
|
SU415206A1 | |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для передачи и фиксации де-ТАлЕй пО пОзицияМ | 1979 |
|
SU835897A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
