2. Захватное устройство для полых изделий с отверстием, содержащее элемент для навешивания на грузоподъемный механизм, две гибкие подвески, на первых концах которых закреплены с возможностью установки их в рабочем положении на одном уровне по вертикали шаровые захватные элементы, отличающееся тем, что, с целью повышения удобства эксплуатации, оно снабжено корпусом, на верхней части которого закреплен элемент для навешивания на грузоподъемный механизм, а на ниж1
Изобретение относится к грузопод ьемным механизмам, в частности к захватным устройствам.
Цель изобретени - повышение удобства эксплуатации.
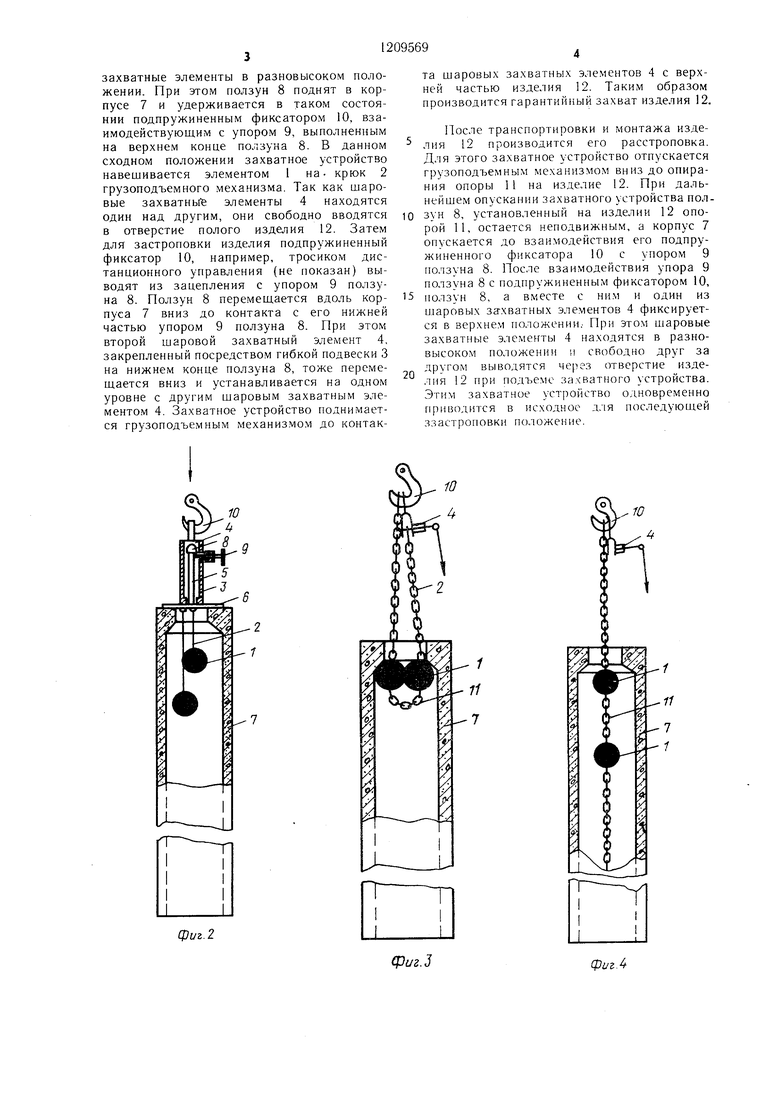
На фиг. изображено захватное устройство для полых изделий с отверстием; на фиг. 2 - то же, при растроповке; на фиг. 3 - вариант захватного устройства; на фиг. -4 - то же, при расстроповке; на фиг. 5 - застроповка изделий захватным устройством.
Захватное устройство для полых изделий с отверстием включает (фиг. 1) э;1е.менты 1 для наве яивания на крюк 2 грузоподъемного механизма (не показан), на которых закреплены одни концы гибких подвесок 3. На других концах гибких подвесок 3 с возможностью установки их в рабочем положении на одном уровне по вертикали закреплены шаровые захватные элементы 4. Шаровые захватные элементы 4 соединены между собой гибкой связью 5, а одна из подвесок 3 выполнена с возможностью разъема и снабжена механиз- мо.м 6 расстроповки с дистанционным управлением.
Но другому варианту захватное устройство (фиг. 3) включает корпус 7, на верхней части которого закреплен элемент 1 для навепшвания на грузоподъемный механизм, а на нижней -- конец одной из гибких подвесок 3. В корпусе 7 с возможностью вертикального перемещения установлен ползун 8, па верхнем конце которого вьиюлнен размещенный в корпусе 7 упор 9 с возможностью взаимодействия его с нижней частью корпуса 7 и с подпружиненным фиксаторо.м 10. На нижней части ползуна 8 выполнена размещенная снаружи корпуса 7 опора 11 для взаимодействия с изделием 12. На опоре 11 закреплен конец второй подвески 3. На нижних концах гибких подвесок 3 закреплены
ней - второй конец одной из гибких подвесок, и установленным в корпусе с возможностью вертикального переменления ползуном, на верхнем конце которого выполнен размещенный в корпусе с возможностью взаимодействия с его нижней частью упор, а на нижнем - размеш,енная снаружи корпуса опора для взаимодействия с изделием, при этом второй конец другой гибкой подвески закреплен на опоре, а корпус выполнен с подпружиненным фиксатором для взаимодействия с упором ползуна.
шаровые захватные э-лементы 4 с воз.мож- ностью установки их в рабочем положении на одно.м уровне по вертикали.
Устройство по первому варианту рабо- тает следующим образом. Элементами 1 захватное устройство навешивается на крюк 2 грузоподъемного .механизма. Один из шаровых захватных элементов 4 вводится в отверстие полого изделия 12. Второй захватный э;1емент 4
под тяжестью первого и соединенный с ним гибкой тягой 5 также увлекается в отверстие. Так как в рабочем положении подвески 3 равны по длине, то шаровые захватные элементы 4 в полости изделия 12 располагаются на одном уровне
по вертикали. Грузоподъемным механиз.мом захватное устройство поднимается до отверстия в изделии 12. Шаровые захватные элементы 4 не имеют возможности выйти через отверстие (так как их су.м мерный
диаметр больше диаметра отверстия), не могут они выйти и друг за другом (так как они подвешены на одном уровне и занятие лидирующего положения одни.м из элементов 4 ведет к ослаблению натяжения его подвески 3 и, наоборот, к усилению
натяжения подвески 3 другого элемента 4), т. е. при подъеме крюка 2 грузоподъемным механизмом происходит гарантированный захват изделия 2.
После монтажа изделия 12 для расстроповки захватного устройства .мехапизмом дистанционного управления ujapoBbie захватные элементы 4 приводятся в разновысокое положение посредством разъема одной из подвесок 3. Нри этом шаровые захватные элементы 4 оказываются подвешенными на одной подвеске 3 один под
другим посредством гибкой связи 5, после чего захватное устройство извлекают из полости изделия 12 через отверстие.
Захватное устройство по второму варианту в исходном состоянии имеет шаровые
захватные элементы в разновысоком положении. При этом ползун 8 поднят в корпусе 7 и удерживается в таком состоянии подпружиненным фиксатором 10, взаимодействующим с упором 9, выполненным на верхнем конце ползуна 8. В данном сходном положении захватное устройство навешивается элементом 1 на- крюк 2 грузоподъемного механизма. Так как шаровые захватный элементы 4 находятся один над другим, они свободно вводятся в отверстие полого изделия 12. Затем для застроповки изделия подпружиненный фиксатор 10, например, тросиком дистанционного управления (не показан) выводят из зацепления с упором 9 ползуна 8. Ползун 8 перемеш,ается вдоль корпуса 7 вниз до контакта с его нижней частью упором 9 ползуна 8. При этом второй шаровой захватный элемент 4, закрепленный посредством гибкой подвески 3 на нижнем конце ползуна 8, тоже переме- ш.ается вниз и устанавливается на одном уровне с другим шаровым захватным элементом 4. Захватное устройство поднимается грузоподъемным механизмом до контак0
5
0
та шаровых захватных элементов 4 с верхней частью изделия 12. Таким образом производится гарантийный захват изделия 12.
После транспортировки и монтажа изделия 12 производится его расстроповка. Для этого захватное устройство отпускается грузоподъемным механизмом вниз до опира- ния опоры И на изделие 12. При дальнейшем опускании захватного устройства ползун 8, установленный на изделии 12 опорой 11, остается неподвижным, а корпус 7 опускается до взаимодействия его подпружиненного фиксатора 10 с упором 9 ползуна 8. После взаимодействия упора 9 ползуна 8 с подпружиненным фиксатором 10, нолзун 8, а вместе с ни.м и один из U-iapOBbix зн хватных элементов 4 фиксируется в верхнем положении.- При этом шаровые захватные элементы 4 находятся в разновысоком положении и свободно друг за другом выводятся через отверстие изделия 12 при подъеме захватного устройства. Этим захватное устройство одновременно приводится в исходное для последующей ззастроповки положение.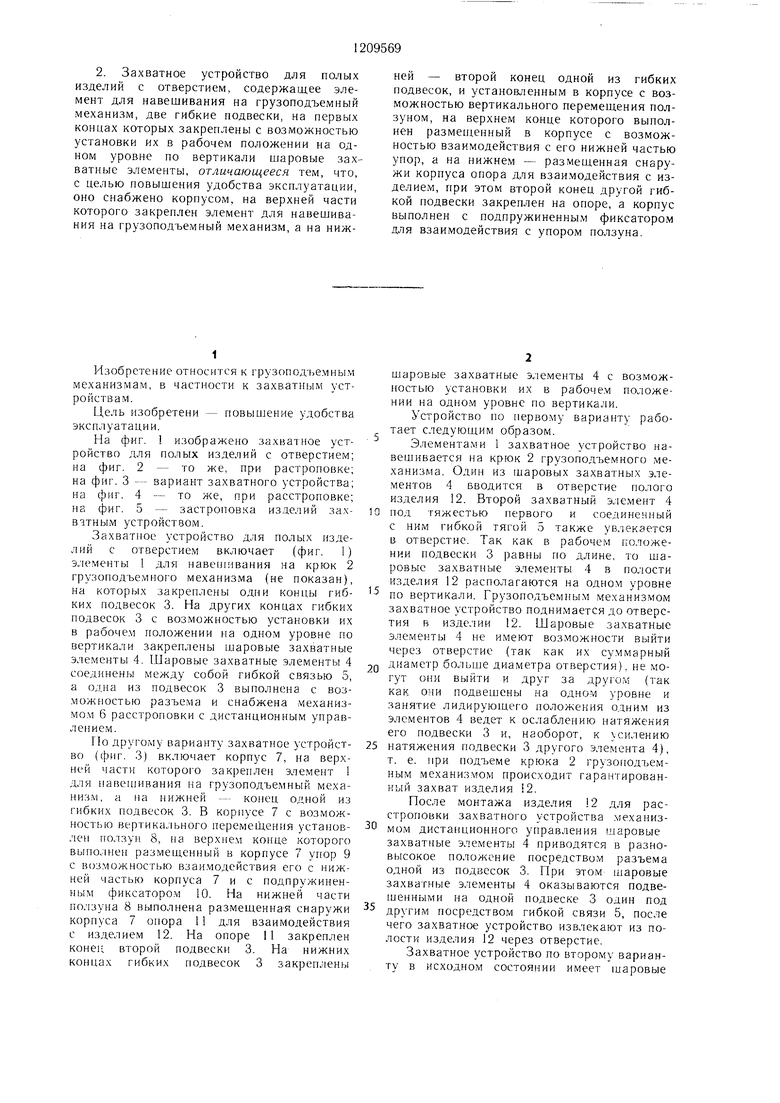
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| Захватное устройство для грузов с проушинами | 1990 |
|
SU1787925A1 |
| Захват для подъема колонн с консолями | 1981 |
|
SU1054271A1 |
| Самоотцепляющееся захватное устройство | 1982 |
|
SU1079592A1 |
| Захват для грузов с проушинами | 1990 |
|
SU1730002A1 |
| Подвеска | 1990 |
|
SU1787919A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Захватное устройство для грузовС цЕНТРАльНыМ ОТВЕРСТиЕМ | 1978 |
|
SU810598A1 |
| Захватное устройство для полых изделий | 1981 |
|
SU1049408A1 |
| Устройство для расстроповки | 1990 |
|
SU1759776A1 |
1. Захватное устройство для полых изделий с отверстием, содержащее элемент для навешивания на грузоподъемный механизм, две гибкие подвески, на первых концах которых закреплены с воз.можностью установки их в рабочем положении на одном уровне но вертикали шаровые захватные элементы, а второй конец одной из гибких подвесок закреплен на элементе для навешивания на грузоподъемный механизм, отличающееся тем, что, с целью повышения удобства эксплуатации, оно снабжено дополнительным элементом для навешивания на грузоподъемный механизм, второй конец другой гибкой подвески закреплен на дополнительном элементе для навешивания на грузоподъемный механизм, а HiapoBbie захватные элементы соединены между собой гибкой связью, при этом одна из гибких подвесок выполнена с возможностью разъема и снабжена механизмом расстроповки, с дистанционшлм управлением. сл да 1чЭ о со О О5 СО
Фиг.2
ГО
фиг.З
фиг 4
Фиг. 5
| Патент США № 3259421, кл | |||
| ДИФФЕРЕНЦИАЛЬНАЯ ТЕРМИОННАЯ ЛАМПА | 1920 |
|
SU294A1 |
| Двухтактный двигатель внутреннего горения | 1924 |
|
SU1966A1 |
