1
Изобретение относится к общему машиностроению и может быть использовано в манипуляторах промышленных роботов.
Цель изобретения уменьшение габаритов и повьшение надежности работы.
На фиг. 1 показан шарнир манипуля тора, общий вид в разрезе; на фиг. 2- разрез на фиг. 1.
Шарнир манипулятора содержит первое 1 и второе 2 звенья, корпус звена 1 состоит из двух частей 3 и 4, в которых установлена сфера 5 звена 2. В корпусе звена I установлены при воды 6 и 7, выполненные в виде силовых цилиндров, имекнцих штоки 8, причем на поверхности этих штоков выполнены канавки под шарики 9, На сфери- ческой поверхности второго звена выполнены соответствуюпще концентрические канавки 10 для обеспечения зацепления с шариками 9. В корпусе звена 1 выполнены направляющие 11, дно которых имеет сферический радиус соответствукяций радиусу шариков 9. Части 3 и 4 соединены при помощи кре пежных элементов 12, например болтов с гайками.
Шарнир манипулятора работает следующим образом.
-
290382
При подаче рабочей среды в один из гидроцилиндров 6 происходит выдвижение; штока 8 с вложенньми шариками 9, которые воздействуют на круговые 5 концентрические канавки 10. В результате взаимодействия: шток 8 - шарики 9 - круговые концентрические канавки 10 происходит поворот сферы 5 в плоскости соприкосновения шариков 9 10 со с 5ерой 5. При выходе шариков 9 из круговызс канавок 10 они попадают .в направляющие 11, по которым совершают Дсшьнейшее перемещение. Возврат сферы 5 в исходное положение осущест-
15 вляется за счет подачи рабочей среды в диаметрально противоположный гидроцилиндр .
Для поворота сферы 5 в пространст- 20 ве рабочую среду подают в цилиндр 6 и цш:(индр 7, установленный в плоскости, перпендикулярной плоскости цилиндров 6. Действие в отдельности цилиндров 6 и 7 на сферу 5 аналогично 25 описанному вьш1е, В данном случае получается сложное движение, при котором шарики 9 одновременно воздействуют на круговые канавки 10 и перемещаются по ним на угол-, который зада- 30 ется приводом, расположенным в перпендикулярной плоскости.
- л
--®It
Фиг 2
Редактор Н, Тупица Заказ 2406/13
Составитель А, Позняк
Техред Н.Бонкало Корректор Г. Решетник
Тираж 103 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д, А/З
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4.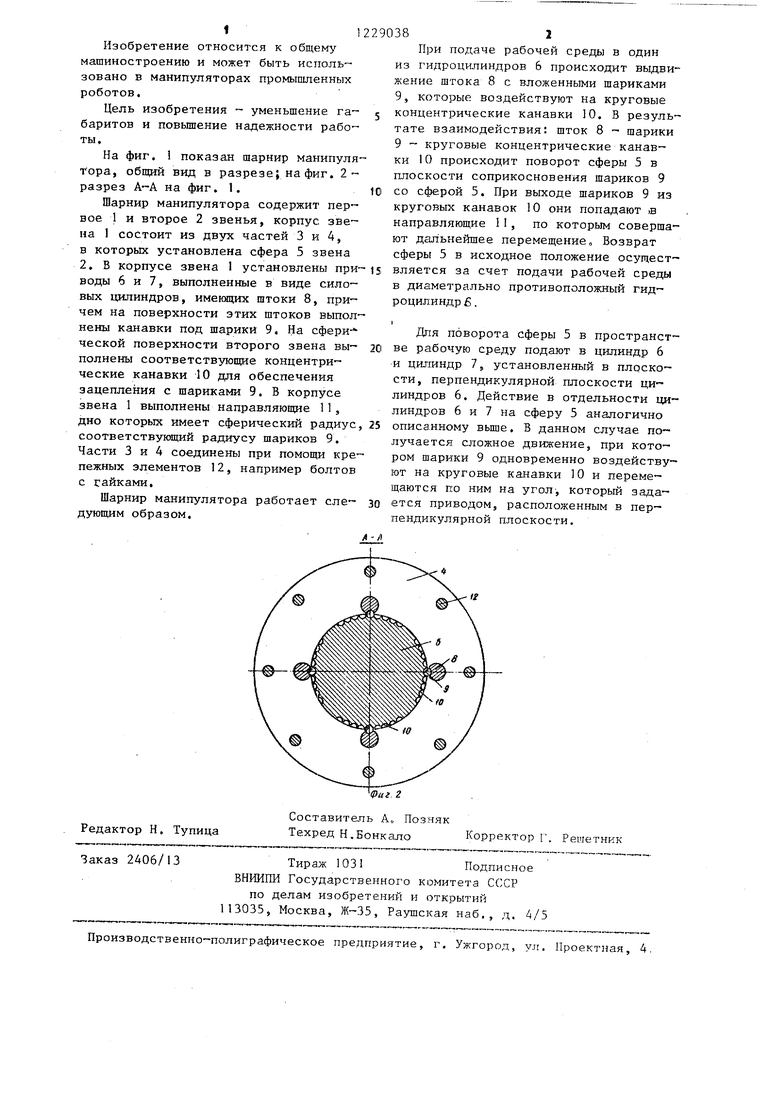
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| МНОГОКРАТНЫЙ ШАРНИР ПЕРЕДАЧИ | 2020 |
|
RU2749819C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2179920C2 |
| Вращательная пара | 1983 |
|
SU1348170A1 |
| МЕХАНИЗМ ШАРНИРА МАНИПУЛЯТОРАВ П ТБ | 1972 |
|
SU422580A1 |
| ЛЕСОПРОМЫШЛЕННЫЙ РОБОТ | 2003 |
|
RU2247019C2 |
| БОЛЬШЕГРУЗНАЯ БЕРЕГОВАЯ ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ДЛЯ ПОГРУЗКИ И ВЫГРУЗКИ СПГ | 2020 |
|
RU2791762C1 |
| Манипулятор | 1986 |
|
SU1351782A1 |
| Автоматический манипулятор с программным управлением | 1985 |
|
SU1390014A1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385284C1 |

| Приводная кинематическая пара | 1984 |
|
SU1196259A1 |
