Изобретение относится к автоматике и вычислительной технике и может быть использовано для управления циклически работающими транспортными средствами, например, автооператорами гальванических линий.
Цель изобретения - расширении области применения и упрощение конструкции .
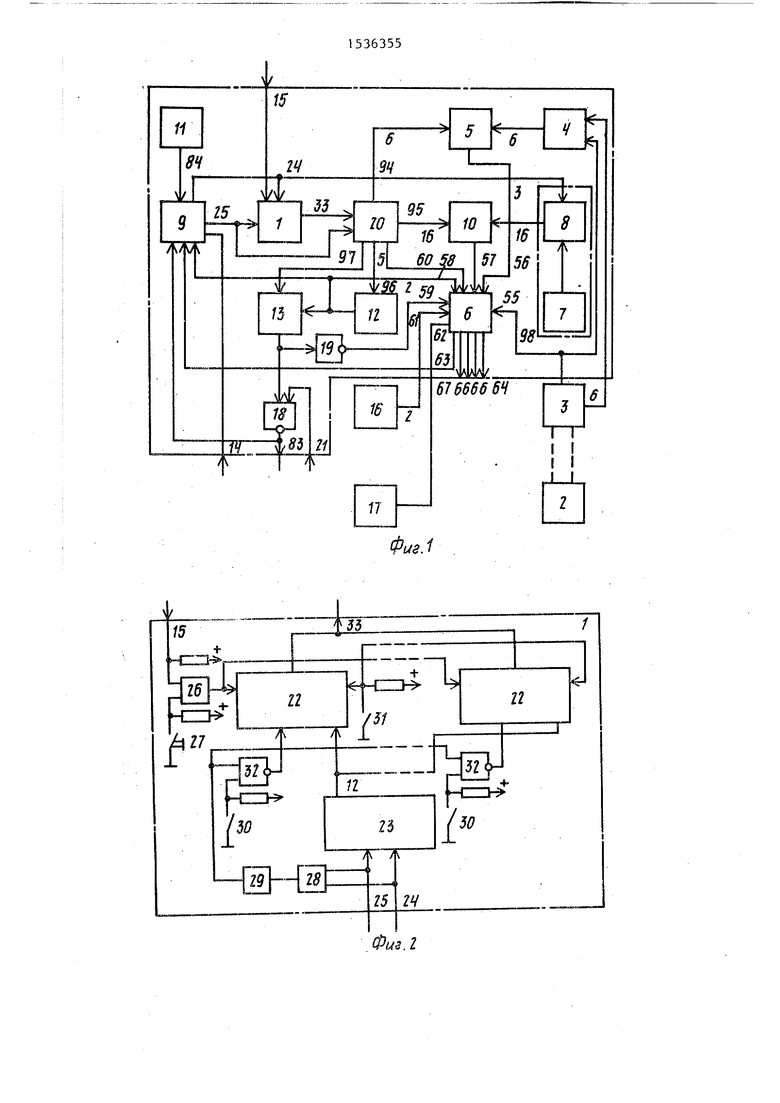
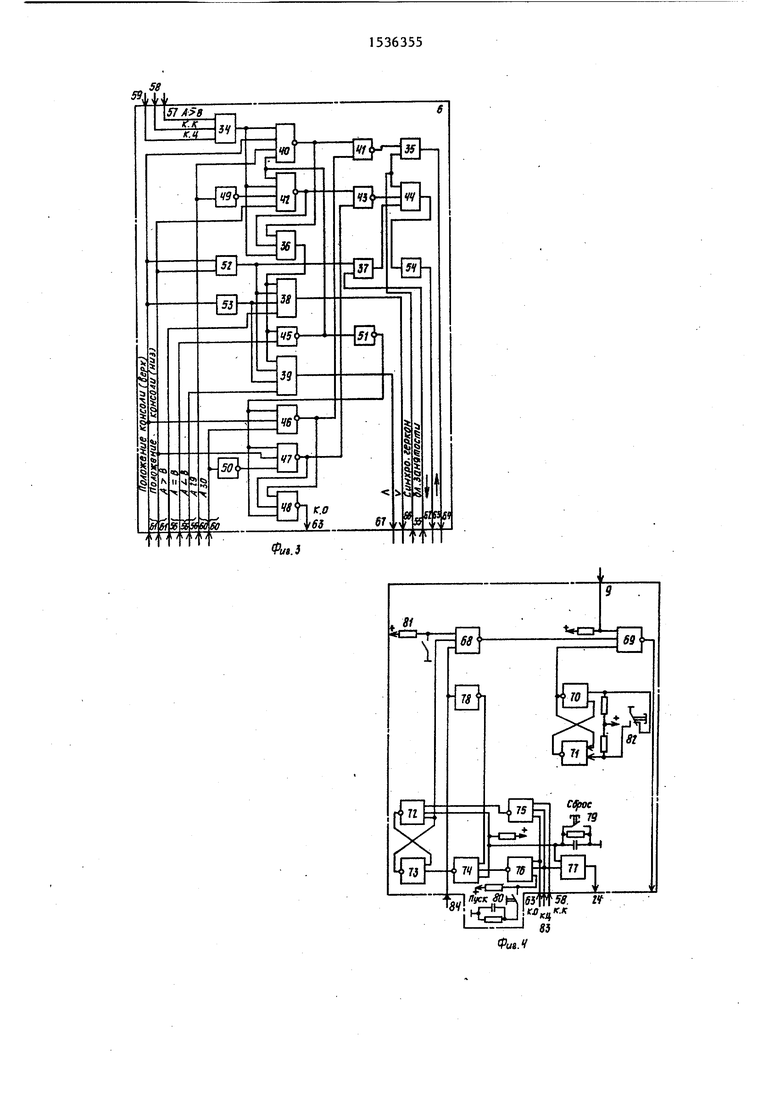
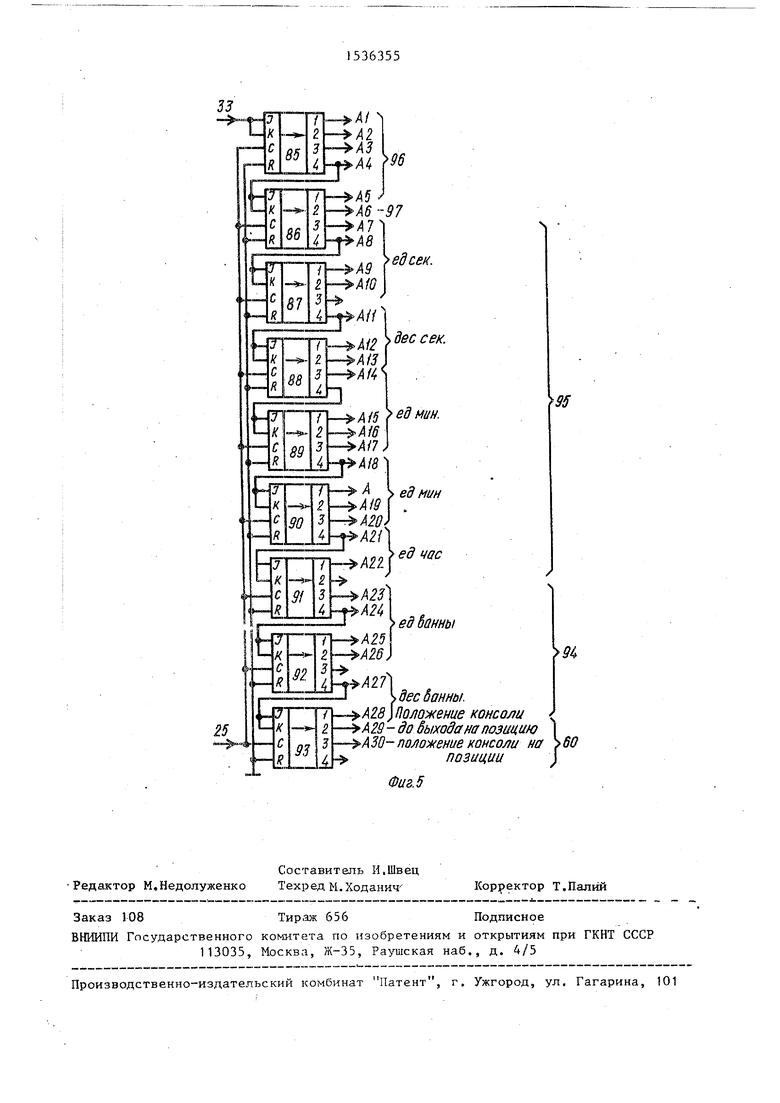
На фиг, 1 представлена структурная схема устройства программного управления автооператором; на фиг. 2 - структурная схема блока постоянной памяти; на фиг. 3 - функциональная схема блока управления автооператором; на фиг. 4 - функциональная схема блока управления тактовой частоты;
на фиг. 5 - функциональная схема регистра сдвига.
Устройство для программного управления автооператором содержит блок 1 формирования управляющей информации, шифратор 2 позиции, дешифратор 3 позиции, блок 4 триггеров, блок 5 сравнения, блок 6 управления автооператором, генератор 7 секундных импульсов, счетчик 8 импульсов, блок 9 распределения тактовой частоты, блок 10 сравнения, генератор тактовой частоты 11, дешифратор 12 конца кадра, дешифратор 13 конца цикла, вход 14 подачи тактовой частоты с ЦЭВМ, информационный вход 15 с ЦЭВМ, датчик положения рабочего органа (консоли) 16, датчик
сд
00 О
со ел ел
17 наличия автооператора, элемент И-НЕ 18, элемент НЕ 19, регистр 20, вход синхронизации с другими автооператорами 21 .
Блок формирования управляющей информации (фиг г, 2) содержит блок 22 постоянной памяти (ППЗУ)„ Олок 23 выбора ячеек памяти, вход 24 сброса, вход 25 тактовой частоты5 элемент И 26, кнопку 27 записи информации, элемент И 28, одновибратор 29, тумблер 30 выбора программы- тумблер 3 выбора режима (запись-считывание) элемент И-НЕ 32, выход 33 блока,
Влок управления автооператором 6 (фиг. 3) содержит первый 34, второй 35, третий 36, четвертый 37, пятый 38, шестой 39 элементы И5 первый 40, второй 41, третий 42э четвертый 43, пятый 44, шестой 459 седьмой 46, восьмой 47, девятый 48 элемеьты И-НЕ, первый 49, второй 50, третий 51 элементы НЕ, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 52, первый 53, второй 54 элементы задержки, входы выходы 63-67
Блок 9 распределения тактовой частоты (фиг. 4) содержит первый 68, второй 69, третий 70, четвертый 71, пятый 72, шестой /3, седьмой 74, восьмой 75, девятый 76 элементы И--НЕ, элемент И 77, элемент ЧЕ 78, кнопку сброса 79, кнопку пуска 80, тумблер 81 блокировки тактовой частоты, тумблер 82 единичных импульсов, входы 8 3-84 о
Регистр 20 (фиг, Ь; содержит четырехразрядные 85-93 регистры сдвига. Устройство также содержит выходы 94-97, счетчик 98 времени,,
Обработка кадра осуществляется в следующей последовательности: выдержка до заданного времени{ отработка положения консоли в канале движения на позицию, движение автооператора на заданную позицию, отработка заданного положения консолн на позицию, Отсчет времени начинается с начала отработки цикла Программирование кадра ведется по методу запрещенных ячеек, т.е. информационные ячейки ограничены с обоих сторон запрещенными. Количество информационных ячеек, ограниченных запрещенными, меньше количества ячеек, используемых для хранения признака конца кадра и конца цикла. В запрещенных ячейках всегда записывается О, в ячейках признака . конца кацра и цикла - 1, а в инфор
0
5
0
5
0
5
0
5
мационных - любые требуемые значения. ГШЗУ программирует согласно циклограммы. Время и номер ванны задается в кадре в коде 1,2,4,8. Шифратор 2 позиции с помощью постоянных магнитов шифрует номер позиции в коде 1, 2,4,8, Для определения момента считывания информации из дешифратора 3 позиции и момента торможения автооператора в шифраторе установлен дополнительный магнит. Шифратор крепится на станине линии. Положение автооператора распознается с помощью герко- нового дешифратора позиции 3 с регулируемой величиной зоны срабатывания синхронизирующего геркона. Эта зона срабатывания равна удвоенной величине пути торможения автооператора, но должна быть меньше зоны срабатывания герконов дешифратора позиции. Сужение зоны срабатывания достигается за счет последовательного соединения двух герконов, сдвинутых относительно друг друга, э расширение - за счет параллельного соединения двух или нескольких герконов. Дешифратор 3 позиции крепится на автооператоре. Информация с дешифратора 3 позиции с первого выхода поступает на первый вход блока 4 триггеров, а момент записи информации в триггере определяется сигналом на втором входе, поступающим со второго выхода дешифратора 3 позиции. Эта информация передается на вход 55 блока управления автооператором и указывает на нахождение автооператора на позиции. Блок 5 сравнения принимает информацию на первый вход с блока 4 триггеров и на второй вход с выхода 94 регистра 20, сравнивает ее и выдает сигнал Равенство, Больше, Меньше на второй вход 56 блока 6 управления автооператором (БУА). Сигналы с выхода генератора 7 (секундных) импульсов поступают на первый вход счетчика 8 импульсов. На второй вход счетчика 8 импульсов поступает информация на обнуление счетчика. На перэый вход блока 10 сравнения поступает информация о заданном времени с выхода 95 регистра 20, а на второй вход блока 10 сравнения поступает информация о времени с начала отработки цикла с выхода счетчика 8. С выхода блока 0 сравнения сигнал Заданное время Текущее поступает на третий вход 57 блока 6. Сигнал с выхода дешифратора конца кадра 12 для блока 9
является запрещающим дальнейшее считывание, а для блока 6 на входе 58 - разрешающим отработку кадра. Сигнал с выхода 63 блока 6, поступающий на вход блока 9, дает разрешение на считывание следующего кадра. Сигнал с выхода дешифратора 13 конца цикла через элемент 19 запрещает отработку блоку 6 и поступает на первый вход элемента И-НЕ 18, на второй вход которого поступает сигнал о выполнении цикла другими автооператорами, если они имеются. Устройство, кроме датчика 16, датчика 17 наличия автооператора, дешифратора 3 позиции и шифратора 2, собрано на одной печатной плате и смонтировано на линии.
Устройство работает следующим образом.
При нажатии кнопки 79 сброс в блоке 9 распределения тактовой частоты сигналом на входе 24 в блок 22 блока 1 формирования управляющей информации выбирается первая ячейка памяти и производится сброс счетчика 8 импульсов. Тумблером 30 выбирается одна из ячеек. Тумблер 31 ставится в положение считывания или записи. Сигналами тактовой частоты 25 производится последовательный выбор ячеек памяти блоком 23 выбора ячеек памяти, а через элемент И 23, одновибратор 29, элемент И-НЕ 32 вывод их содержимого на выход 33. Кнопкой 27 или сигналом на входе 15 с ЦЭВ11 записывается единица или нуль в выбранные ячейки. В блоке 9 при замыкании тумблера 81 (блокировка тактовой частоты) эле0
5
0
5
0
5
J4 элемента И-НЕ 6,9 используется при записи с ЦЭВМ. В режиме Работа тумблеры 83 и 82 разомкнуты. Управление элементом И-НЕ 68 производится по второму входу, т.е. инвертированный сигнал тактовой частоты появляется на выходе элемента И-НЕ 68 при сигнале Единица на втором входе, поступающему с триггера, собранного на элементах И-НЕ 72 и 73. Нажатие кнопки 79 сброс устанавливает триггер на элементах И 72, 73 в исходное состояние. На выходе элемента И-НЕ 73 устанавливается нулевой сигнал. После нажатия кнопки 79 сброс начинается отсчет времени счетчика 8 и при нажатии кнопки 80 пуск элемент И-НЕ 76 установит на выходе единицу, а элемент И-НЕ 74, синхронизированный тактовой частотой, яерез элемент 78 устанавливает на выходе нулевой сигнал. На выходе элемента И-ИЕ 73 устанавливается единица. Через элементы И-НЕ 68, 69 тактовая частота по второму входу 25 блока 9 производит последовательный опрос ячеек памяти и запись их значений в регистр 20 до момента поступления единичного сигнала на первый вход 58 элемента И-НЕ 75 из блока 12. Нулевой сигнал-на выходе элемента И-НЕ 75 перебросит триггер, и нулевой сигнал на выходе элемента 73 блокирует прохождение тактовой частоты через элемент 68. Это устойчивое состояние сохраняется, пока не поступит нулевой сигнал из блока 6 после обработки заданных значений в данном кадре. Момент появле
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления автооператорами гальванической линии | 1987 |
|
SU1429089A1 |
| Устройство для программного управления автооператорами гальванической линии | 1979 |
|
SU857935A1 |
| Устройство для программного управления | 1982 |
|
SU1057925A1 |
| Устройство для программного управления автоматическими линиями гальванопокрытий | 1983 |
|
SU1173393A1 |
| Устройство для программного управления | 1986 |
|
SU1397878A1 |
| Устройство для задания циклов в системах цифрового программного управления | 1985 |
|
SU1280575A1 |
| Устройство для программного управления | 1981 |
|
SU1029145A1 |
| Устройство для контроля систем программного управления станком | 1988 |
|
SU1580320A1 |
| Система числового программного управления с постоянной скоростью резания для токарно-винторезных станков | 1981 |
|
SU978102A1 |
| Устройство для программного управления | 1982 |
|
SU1067470A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано для управления циклически работающими транспортными средствами, например автооператорами гальванических линий. Цель изобретения - расширение области применения. Устройство для программного управления автооператором содержит блок формирования управляющей информации, шифратор позиции, блок управления автооператором, счетчик времени, генератор тактовой частоты, первый и второй блоки сравнения, дешифратор позиции, блок триггеров, регистр, дешифратор конца кадра, дешифратор конца цикла, датчик наличия автооператора, элемент И-НЕ, элемент НЕ, регистр, блок распределения тактовой частоты. Отработка кадра программы осуществляется в следующей последовательности: выдержка до заданного времени, обработка положения консоли в начале движения на позицию, движение автооператора на заданную позицию, обработка положения консоли на позиции. 5 ил.
мент И-ИЕ 68 нулевым сигналом на пер- 40ния единицы на втором входе элемента вом входе устанавливает на выходе-68 синхронизирован тактовой частотой. единицу, независимо от значения дру-Таким образом, блок 9 по сигналу гих входных сигналов. Этот режим ис- Сброс обнуляет счетчик времени .98,а пользуется при записи программы и ееППЗУ устанавливает на выходе 33 дан- проверке в ручном режиме. При замыка- 45ные первой ячейки памяти, по сигналу
нии тумблера 81 управление элементом И-НЕ 69 переходит к триггеру, собранному на элементах И-ПЕ 70 и И-НЕ 71, а триггер управляется тумблером 82, выходной сигнал элемента И-НЕ 69, яв- gQ ляющийся входом 25 блока 9, производит в блоке 1 последовательный выбор ячеек памяти при записи информации и ее считывании, а в регистре 20 последовательный сдвиг информации при gg считывании (при записи информации на вход регистра 20 не поступает, так как выход 33 блока 2 в режиме записи имеет большое сопротивление). Вход
Пуск записывается в регистр первый кадр. Блок 6 отрабатывает заданные данные и после обработки выдает сигнал на считывание следующего кадра. Процесс продолжается до получения нулевого сигнала на входе 83 на третьих входах элементов И-НЕ 75, 76. Действие этого сигнала аналогично последовательному действию сигнала Сброс и Пуск. Этот сигнал конца цикла (к.ц.) вырабатывает дешифратор 13 при наличии в кадре признака конца цикла. Сигнал Конец цикла в блок 9 поступает только при наличии едини Пуск записывается в регистр первый кадр. Блок 6 отрабатывает заданные данные и после обработки выдает сигнал на считывание следующего кадра. Процесс продолжается до получения нулевого сигнала на входе 83 на третьих входах элементов И-НЕ 75, 76. Действие этого сигнала аналогично последовательному действию сигнала Сброс и Пуск. Этот сигнал конца цикла (к.ц.) вырабатывает дешифратор 13 при наличии в кадре признака конца цикла. Сигнал Конец цикла в блок 9 поступает только при наличии единицы на втором входе элемента й-НЕ 18С Если данный автооператор синхронизован с другими, т.е. на второй вход элемента И-НЕ 18 заведен сигнал кон,ца цикла с другого автооператора, тее, на выходе элемента И-НЕ I8 сигнал не появитсяj пока не поступит единичный сигнал конца цикла с другого автооператора и устройство находится в ждущем режиме. Приход этого сигнала про должит работу устройства в указанной выше последовательности. Если синхронизация не обязательна,, то второй вход соединяют с плюсом источника Блок б управления автооператором дает разрешение на отработку кадра при сигнале единица на всех 3-х входам элемента И 34, т.е. на входе элемента И 34 единицы при условии время заданное равно f времеги текущего (А2Б), дешифратором конца кадра 12 установлен признак конца кадра, а в дешифраторе конца цикла 13 -. отсут10
20
та 34 через элемент 36, 45 на четве том входе устанавливает единицы на первом входе элемента И-НЕ 40, на выходе элемента И-НЕ 40 появляется нуль и дает разрешение на подъем, а через элемент 36 запрещает перемеще ние влево, вправо. Через элемент И45,элемента НЕ 51 и элементов И-НЕ
46,47 устанавливает единицы на вто рых входах элементов И-НЕ 41,43.
При достижении консолью верхнего положения нулевой сигнал по третьем входу элемента И-НЕ 40 устанавливае на выходе единицу и на всех трех входах элемента И 36 устанавливаетс единица. Единичный сигнал с выхода элемента 36 устанавливает единицу н первых входах элементов 38, 45 и 39 На второй вход элементов 38, 39 через элемент 2 поступает запрет на передвижение автооператора, если консоль не находится в одном из кра
ствие признака конца цикла, Присутст- 25 них положений. На третий вход элевие единичных сигналов на трех входах элемента 34 устанавливает на первом входе элемента 40 единицу. На второй вход поступает сигнал с регистра 20 (А29) о положении коисолл до выхода на позицию (верхнее положение рабочего органа, консоли, программируется единицей,, -гажнзе - нулем). На третий выход ьоступает сигнал с датчика 16 положения о деист- вительном положении консоли (нулевой сигнал при положении чонсопи в зерх- нем положении),, Пулевой выход элемента 40 дает разрешение на поцъем консоли через первые входы элементов И-НЕ 41, 35 о Второй вход элемента И-НЕ 35 запрещает подъем, если автооператор стоит не на позиции (сипхро- геркон не замкнут) Элемент И-НЕ 42
аналогичным образом сравнивает задан- ,,5 положение, выдают сигналы на переменое положение коксоги с текущим и нулевым выходом и дает разрешение на опускание консоли. Например, заданное) положение консоли па ВТОРОЙ входе элемента И-НЕ 40 из регистра 20 (А29) единица, т,е, консоль должна находиться в верхнем положении,, Элемент 49 нулевым выходом устанавливает выход элемента И-НЕ 42 в единичное состояние и запрещает движение вниз, Если консоль не в верхнем положении, то на третьем входе элемента И-ЬЕ 40 также единица. Нулевой сигнал во время считывания кадра с выхода элемен
0
та 34 через элемент 36, 45 на четвертом входе устанавливает единицы на первом входе элемента И-НЕ 40, на выходе элемента И-НЕ 40 появляется нуль и дает разрешение на подъем, а через элемент 36 запрещает перемещение влево, вправо. Через элемент ИНЕ
45,элемента НЕ 51 и элементов И-НЕ
46,47 устанавливает единицы на вторых входах элементов И-НЕ 41,43.
При достижении консолью верхнего положения нулевой сигнал по третьему входу элемента И-НЕ 40 устанавливает на выходе единицу и на всех трех входах элемента И 36 устанавливается единица. Единичный сигнал с выхода элемента 36 устанавливает единицу на первых входах элементов 38, 45 и 39. На второй вход элементов 38, 39 через элемент 2 поступает запрет на передвижение автооператора, если консоль не находится в одном из крайментов 38 и 39 поступает сигнал задержки с элемента 53, необходимый для стекания жидкости после подъема консоли. При наличии одного из сигналов блока сравнения 5 А В на четвертых входах элементов И 38, 39 выдается сигнал на перемещение автооператора в ту или другую сторону, При поступлении на второй вход элемента И-НЕ 45 сигнала равенства вход элемента И-НЕ 45 блокируют элементы И-НЕ 40, 42 по четвертому входу. Управление подъемом или опусканием осуществляется по второму входу элементов И-НЕ 41, 43, Начинается отработка положения консоли на позиции. Элементы И-НЕ 46, 47 сравнивают заданное значение положения консоли на позиции с регистра 20 (АЗО) и текущее
0
щение в нужное положение, Запрет на опускание коасоли при наличии сигнала датчика наличия (в ванне находит ся другая подвеска) осуществляется через элемент И 37, На элементе 54 задержки осуществляется задержка при опускании консоли, необходимая для прекращения колебательных движений подвески перед опусканием. После отработки перемещений консоли на позиции на всех входах элемента 48 устанавливаются единичные сигналы, и нулевой сигнал выхода сигнализирует об отработке кадра.
ормула и
9 з о 6 р
153
е т е н и я
Устройство для программного управления автооператором, содержащее блок g формирования управляющей информации, выход которого соединен с входом данных регистра, датчик положения рабо чего органа и датчик наличия автооператора, блок управления автооперато- ю ром, первый и второй блоки сравнения, а также счетчик времени, элемент И-НЕ, элемент НЕ, отличающееся тем, что, с целью расширения области применения и упрощения конст-15 рукции, в него введены генератор тактовой частоты, блок распределения тактовой частоты, дешифратор конца кадра, дешифратор конца цикла, блок триггеров, шифратор позиции и дешиф- 20 ратор позиции, первый выход которого соединен с первым установочным входом блока триггеров, второй установочный вход которого подключен к второму выходу дешифратора позиции як 25 первому информационному входу блока управления автооператором, второй информационный вход которого подключен к выходу первого блока сравнения, третий информационный вход - к выходу второго блока сравнения, вход задания блока сравнения управления автооператором соединен с вторым выходом регистра, разрешающий вход блока
30
ния автооператором через элемент НЕ соединен с выходом дешифратора конца цикла и с первым входом элемента И - НЕ, второй вход которого подключен к входу синхронизации устройства а выход - к первому выходу устройства и к первому управляющему входу блока распределения тактовой частоты, информационный вход которого соединен с выходом генератора тактовой частоты, вход разрешения - с первым выходом блока управления автооператором, группа выходов которого подключена к группе выходов устройства, вход тактирования которого соединен с вторым управляющим входом блока распределения тактовой частоты, выход которого подключен к входам сброса блока формирования управляющей информации и счетчика времени, вход запрета считывания блока распределения тактовой частоты соединен с выходом дешифратора конца кадра, второй вход которого соединен с третьим выходом регистра, четвертый выход которого подключен к входу дешифратора конца кадра, а пятый выход - к второму входу второго блока сравнения, входы тактовой частоты регистра и блока формирования управляющей информации подключены к информационному выходу блока распределения тактовой частоты, выход блока триггеров соединен с вторым входом
управления автооператором соединен с 35 первого блока сравнения, информационний вход устройства соединен с входом записи блока формирования управляющей информации.,
выходом дешифратора конца кадров и с первым входом дешифратора конца цикла, запрещающий вход блока управле1536355
10
5 0 5
0
ния автооператором через элемент НЕ соединен с выходом дешифратора конца цикла и с первым входом элемента И - НЕ, второй вход которого подключен к входу синхронизации устройства, а выход - к первому выходу устройства и к первому управляющему входу блока распределения тактовой частоты, информационный вход которого соединен с выходом генератора тактовой частоты, вход разрешения - с первым выходом блока управления автооператором, группа выходов которого подключена к группе выходов устройства, вход тактирования которого соединен с вторым управляющим входом блока распределения тактовой частоты, выход которого подключен к входам сброса блока формирования управляющей информации и счетчика времени, вход запрета считывания блока распределения тактовой частоты соединен с выходом дешифратора конца кадра, второй вход которого соединен с третьим выходом регистра, четвертый выход которого подключен к входу дешифратора конца кадра, а пятый выход - к второму входу второго блока сравнения, входы тактовой частоты регистра и блока формирования управляющей информации подключены к информационному выходу блока распределения тактовой частоты, выход блока триггеров соединен с вторым входом
первого блока сравнения, информационний вход устройства соединен с входом записи блока формирования управляющей информации.,
LTl 1Л ГО 40
го 1Л
Ј
i н:
«r
bVu
tef л 3
«а
&
:г
33
М М
AS J А6 -97
А9 едсеК-&А16А17
At8
А
AW r-SMftf/I fA2f
A2Z
}
А26,
Z+A27
-J десоаннь
А28) Положение консоли А29-до быходана позицию А 30- положение консоли на
- позиции
Фиг 5
-Л/ А2
М М
dec сек.
ед мин
95
ед мин
/I
}
ед час
ед донны
$4
60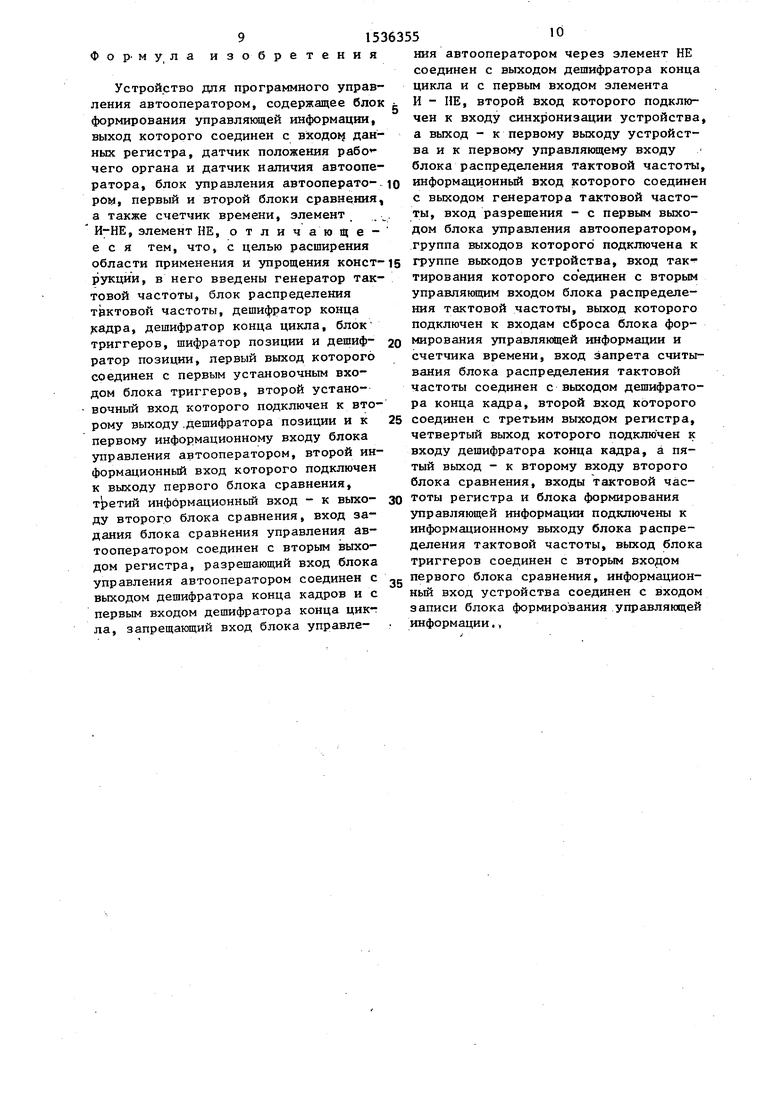
| Устройство для управления авто-ОпЕРАТОРАМи гАльВАНичЕСКиХ лиНий | 1978 |
|
SU807221A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления автооператорами гальванических линий | 1986 |
|
SU1327061A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
