Изобретение относится к автооператорам, осуществляющим подачу дета;1ей и может быть использовано в машиностроении и приборостроении.
Цель изобретения - распшрение технологических возможностей автооператора за счет обеспечения возможности относительного перемещения рук в ог- ра1гаченном пространстве.
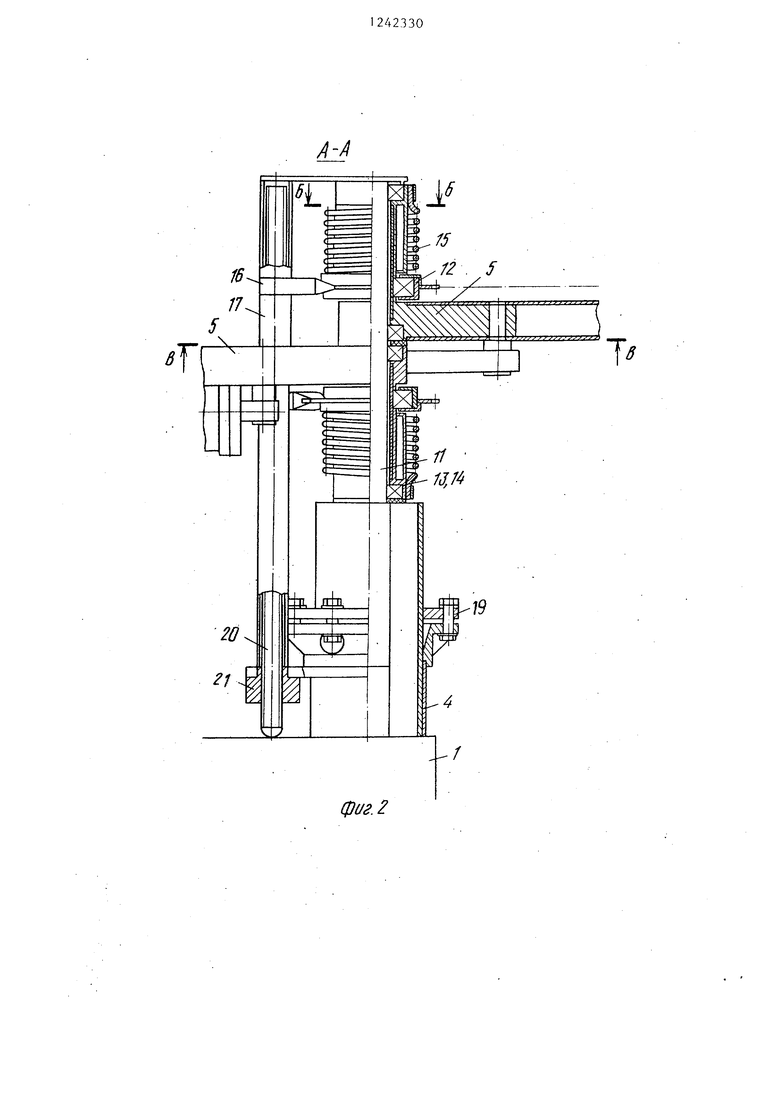
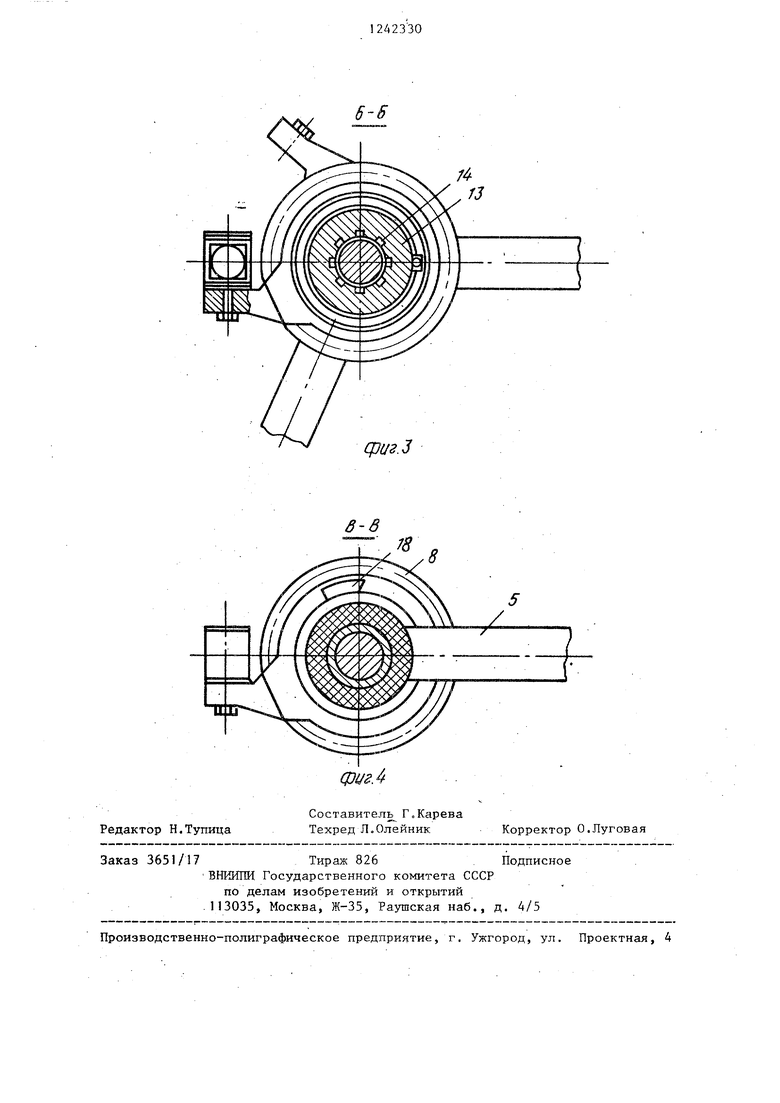
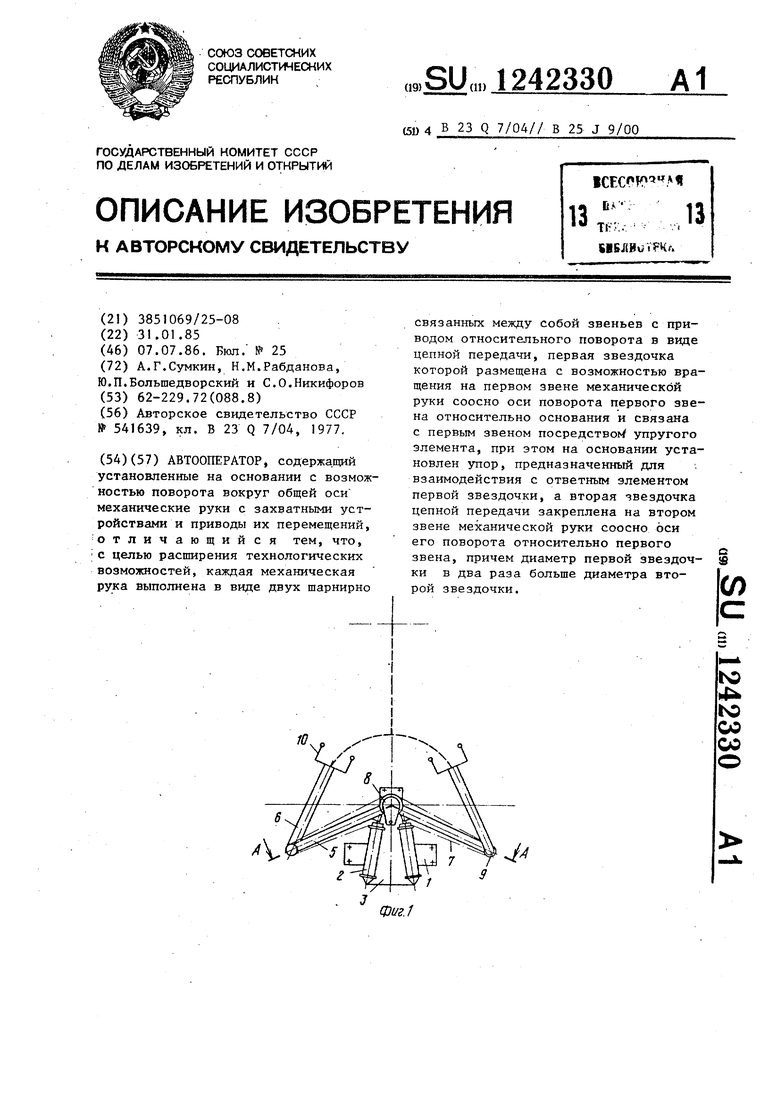
На фиг. изображен автооператор, вид сверху; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Бнафиг.2 на фиг.4 - разрез В-В на фиг.2.
Автооператор состоит из основания 1, приводов 2, установленных на плите 3, колонны 4, на которой установлены руки с щарнирно-рычажной системой, состоящей из первого - ведущего звена 5 и второго - ведомого звена 6 Связь между ведущим 5 и ведомым 6 звеньями осуществляется за счет закрепленной неподвижно на щарнире ведомого звена 6 цепной передачи 7, первой ведущей звездочки 8 и второй 19. На звене 6 установлен схват 10. Ведущая звездочка 8 установлена на оси 1 колонны 4 на подщипнике 12. Подшипниковый узел руки вьшолнен составным из стаканов 13 и 14, соединенных между собой шлицами. На колонне 4 установлена для осуществления обратного прямолинейного движения ведомого звена 6 цилиндрическая пружина 15 кручения, один конец которой закреплен в теле ведущей звездочки 8, а другой - в теле звена 5. Упор 16 крепится к ведущей звездочке 8 и служит для ее останова при контакте с упором 17 основания. Для корректировки угла поворота на упоре 16 установлен болт. На ведущей звездочке для ограничения угла разжатия пружины установлен упор 18, контактирующий с ведущим звеном 5,
Механизм установки автооператора по высоте состоит из колонны 4 с цанговым зажимом 19 и передачи винт - гайка 20 и 21. Привод 2 закреплен на
оси, на плите 3, прикрепленной к ко-, лонне 4.
Автооператор работает следующим образом.
При включении привода 2 рука в согнутом положении совершает движение по дуга, при этом ведущая звездочка 8 поворачивается совместно с ведущим звеном 5, так как она поджата пружиной 15 через упор 18 к ведущему звену 5. При соприкосновении упора 16, установленного на ведущей звездочке 8, с упором 17 основания, звездочка 8 останавливается. Рука
при этом продолжает двигаться и начинает распрямляться в локтевом суставе за счет окатьгоания звездочки 8 цепью 7. В результате применения ведомой звездочки 9, диаметр которой
меньше в 2 раза диаметра ведущей
звездочки 8, схват 10, расположенный на конце ведомого звена 6, совершает прямолинейное поступательное движение. В этот момент пруукина 15 закру
чивается, так как ведущая звездочка
8 стоит, а ведущее звено поворачивается. Рука останавливается в вьтрям- ленном положении при остановке привода 2. При обратном движении щтока . пневмоцилиндра рука за счет предварительной закрутки пружины 15 начинает складываться, а затем движется по дуге в исходное положение. При этом в начальной фазе ведущая звездочка 8 стоит, а после того, как ведущее звено 5 коснется упора 18 на звездочке 8, совершает поворот вместе с ведущим звеном 5.
Вторая рука работает аналогично, . Автооператор позволит повысить эксплуатационные возможности за счет выполнения движения рук независимо друг от друга и получить при этом сложную траекторию движения захвата, включающую движение по дуге и по прямой линии, причем линия поступательного перемещения общая для обеих рук, что упрощает настройку автооператора на оборудование и его экстшуатацию.
фиг. 2
6-6
74/J
срцз.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1984 |
|
SU1191256A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224641C1 |
| Манипулятор | 1984 |
|
SU1194673A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438857C2 |
| Автооператор | 1989 |
|
SU1685675A1 |
| Мальтийский механизм автооператора | 1985 |
|
SU1273669A1 |
| Промышленный робот | 1977 |
|
SU846267A1 |
| Автооператор | 1979 |
|
SU856749A1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2012 |
|
RU2521934C1 |
| РУКА РОБОТА | 2003 |
|
RU2247650C2 |
Редактор Н.Тупица
Составитель Г.Карева Техред Л. Олейник
Заказ 3651/17Тираж 826Подписное
ВНКИПИ Государственного комитета СССР
по делам изобретений и открытий .113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор 0.Луговая
| Автооператор | 1975 |
|
SU541639A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
