Изобретение отноеится к области автоматизации транспортирования насыпных грузов в горнодобывающей, металлургической и химической промышленности.
Цель изобретения - повышение надежности работы конвейерной линии.
На чертеже изображена функциональная схема устройства, реализуюшего предлагаемый способ.
Устройство состоит из конвейеров 1, датна свободном выбеге. При этом до отключения двигателей от сети конвейеры перевохчят на максимальную скорость, так как при нормальном режиме работы грузопоток формируется соответственно поступающему на ленте грузу, и, таким образом, на ленте находится номинальное количество груза, что дает возможность включить конвейер на максимальную скорость, сохранив при этом стабильный грузопоток на время тормочиков 2 скорости, датчиков 3 наличия ма- 10 жения. териала на ленте, блоков 4 управления регу-Такие действия производятся до разгрузлируемым приводом конвейера и вычисли-ки последнего конвейера в линии и отклютельного блока 5.чении его привода от сети. Вычислительный
Способ осуществляют следующим об-блок 5 запоминает состояние конвейерной
разом.линии, сложившееся в момент окончания
При получении сигнала об аварийном 5 торможения. Запуск конвейерной линии на- торможении конвейера в линии из вычисли-чинается с учетом этого состояния. Первым
тельного блока 5 в блок 4 управления регу-запускается конвейер, стоящий сразу же
лируемым приводом конвейера поступает сигнал об отключении двигателя этого конвейера от сети. Двигатель отключается и конвейер тормозится на свободном выбеге. Конвейеры, расположенные до этого конвей20
ера, тормозятся таким образом, чтобы синхронизировать их скорости со скоростью конвейера, привод которого отключен от сети.
за группой груженых конвейеров. С выдержкой времени, необходимой для приведения в движение ленты конвейера по всей длине, запускается груженый конвейер, расположенный последним в группе груженых конвейеров. Груз с него поступает на конвейер, запущенный первым. При достижении грузом места установки датчика 3 наличия материПри этом сигналы с датчиков 2 скорости 25 ала, по сигналу с него запускается следуюпоступают в вычислительный блок 5, где формируют сигнал управления для вышеуказанной группы конвейеров. Скорость конвейера, отключенного от сети, используют как сигнал задания по скорости. Сформированный сигнал управления из блока 5 выдается в блоки 4 управления приводами конвейеров. Конвейеры, расположенные после отключенного от сети конвейера, продолжают движение. При получении сигнала с датчиков 3 наличия материала об отсутстщий порожний конвейер, причем датчик 3 наличия материала располагают на таком расстоянии, чтобы при максимальной скорости движения груза успела прийти в движение но всей длине лента следующего кон- 30 вейера. Последующим в линии запускается конвейер из группы груженых, затем снова порожний. Таким образом производится запуск конвейерной линии, начиная с порожнего конвейера, стоящего за группой груженых конвейеров, далее поочередно
ВИИ груза на ленте блок 5 выдает сигнал 35 запускают груженый и порожний конвейер, об отключении от сети соответствующег орасположенные симметрично относительно
привода конвейера и конвейер тормозитсяконвейера, запуш,енного первым.
на свободном выбеге. При этом до отключения двигателей от сети конвейеры перевохчят на максимальную скорость, так как при нормальном режиме работы грузопоток формируется соответственно поступающему на ленте грузу, и, таким образом, на ленте находится номинальное количество груза, что дает возможность включить конвейер на максимальную скорость, сохранив при этом стабильный грузопоток на время тормозапускается конвейер, стоящий сразу же
за группой груженых конвейеров. С выдержкой времени, необходимой для приведения в движение ленты конвейера по всей длине, запускается груженый конвейер, расположенный последним в группе груженых конвейеров. Груз с него поступает на конвейер, запущенный первым. При достижении грузом места установки датчика 3 наличия материала, по сигналу с него запускается следуюала, по сигналу с него запускается следующий порожний конвейер, причем датчик 3 наличия материала располагают на таком расстоянии, чтобы при максимальной скорости движения груза успела прийти в движение но всей длине лента следующего кон- вейера. Последующим в линии запускается конвейер из группы груженых, затем снова порожний. Таким образом производится запуск конвейерной линии, начиная с порожнего конвейера, стоящего за группой груженых конвейеров, далее поочередно
запускают груженый и порожний конвейер, расположенные симметрично относительно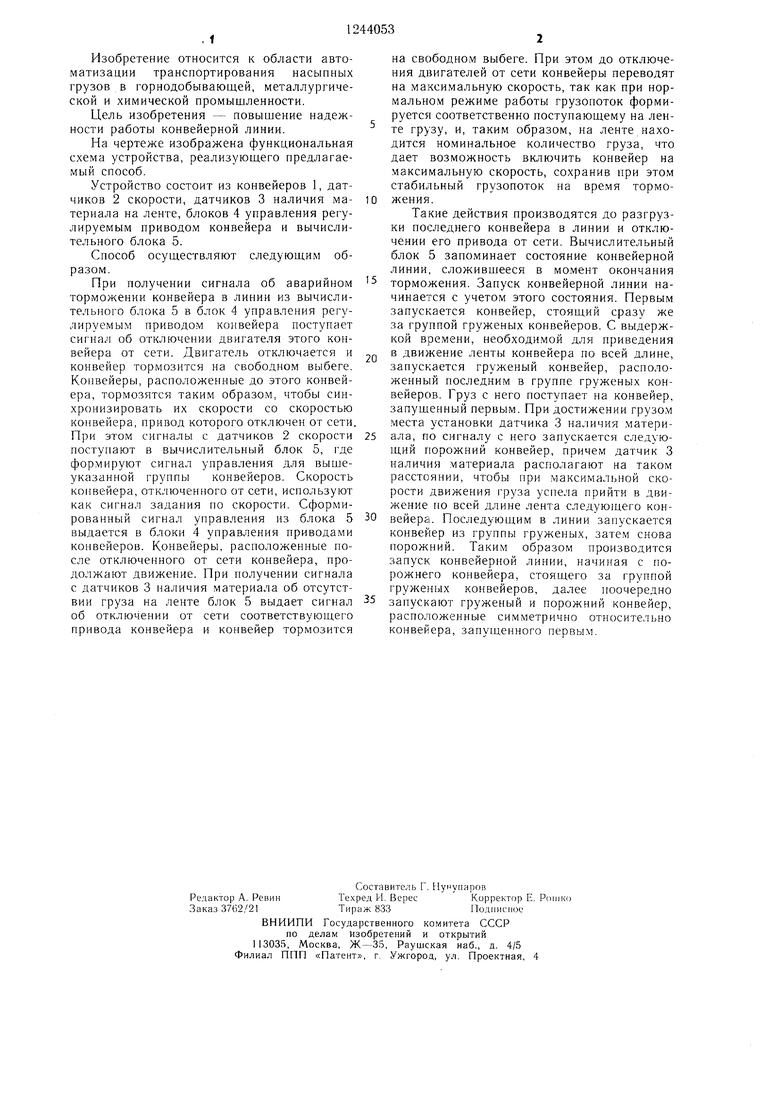
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления конвейерной линией | 1982 |
|
SU1500583A1 |
| Устройство для управления конвейерной линией | 1979 |
|
SU876525A1 |
| Устройство для управления приводом конвейерной установки | 1984 |
|
SU1191391A1 |
| Устройство для управления конвейерной системой | 1984 |
|
SU1240706A1 |
| Способ автоматического выбора маршрута рудничного поезда и устройство для его осуществления | 1979 |
|
SU870231A1 |
| Устройство для управления запуском конвейерной линии | 1974 |
|
SU570525A1 |
| Устройство для управления ленточным конвейером | 1980 |
|
SU910508A1 |
| СПОСОБ УПРАВЛЕНИЯ РАЗВЕТВЛЕННОЙ КОНВЕЙЕРНОЙЛИНИЕЙ | 1969 |
|
SU233770A1 |
| Способ управления ленточным конвейером | 1988 |
|
SU1666413A1 |
| Способ определения массы груза, перевозимого транспортным средством | 1990 |
|
SU1716334A1 |

| Устройство для управления конвейерной линией | 1979 |
|
SU876525A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для управления запуском конвейерной линии | 1974 |
|
SU570525A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
