t
Изобретение относится к мапапю- строению, а именно к схватам промышленного робота.
Цель изобретения - расширение технологических возможностей путем обеспечения захвата объемных изделий.
На фиг.1 изображен схват промышленного робота, общий вид; на фиг.2- схема захвата плоских заготовок (справа) и объемных изделий (слева),
Схват содержит пару захватных губок, вьтолненных в виде Г-образных рычагов 1 и 2, на которых шарнирно установлены с возможностыо поворота в плоскости, перпендикулярной направлению смыкания губок, электромаг- 1гитиые элементы 3, форма рабочих поверхностей которых обеспечивает как поштучный захват листовых заготовок (нижней частью), так и захват отштампованного объемного изделия (боковой стороной).
Рычаги 1 и 2 шарнирно закреплены на корпусах 4 и 5 с возможностыо регулировочного перемещения в зависимости от габаритов изделия по направляющей 6 в направлении, - перпендикулярном оси симметрии охвата.
Поворот рычагов 1 и 2 осуществляется с помощью сильфонов 7 и 8, шарнирно закрепленных одним концом на корпусах 4 и 5, а другим - на рычагах 1 и 2. На сильфонах 7 и 8 установлены штуцеры 9 для подвода сжатого воздуха.
Схват промышленного робота работает следующим образом.
Рычаги 1 и. 2 опускаются на стопу листовых заготовок 10 до соприкосновения нижней пов ерхности электромагнитных элементов 3 с верхней загото
10
504542
кой 10. Затем от cиcтe IJI управлеш я робота (не показана) подается напряжение питания на электромагнитные элементы 3, которые захватывают за- 5 готовку 10 и удерживают ее при перемещении схвата в рабочую зону. После штамповочной операции рычаги 1 и 2 подводятся к отштампованному изделию 11, в силъфоны 7 и 8 по команде с пульта управления робота подается окаты воздух, давление которого растягивает сильфоны 7 и 8, последние поворачивают рычаги 1 и 2 навстречу друг другу до соприкосновения электромагнитных элементов 3 с боковой поверхностью изделия 11. При этом шарнирно закрепленные электромагнитные элементы 3 при подаче на них питающего напряжения плотно прилегают своей боковой поверхностью к поверхности изделия 11, обеспечивая надежное удержание его независимо от дальнейшего наличия сжатого воздуха в полостях спльфонов 7 и В. Опускание изделия 11 производится путем отключения напряжения питания электромагнитных элементов 3. При этом за счет пр окинящих свойств сильфоны 7 и 8 разжимают рычаги 1 и 2 и освобождают изделие 11.
15
20
25
30
Регулировка начального расстояния между губками производится их взаимным перемеа;ением и фиксацией по напранляющет 6.
Предлагаемьш схват позволяет захватывать и транспортировать как плоские заготовки, так и объемные стака- нообразные изделия, что значительно,
рас1Ш1ряе-. его технологические возможности по сравнению с известным схва- том.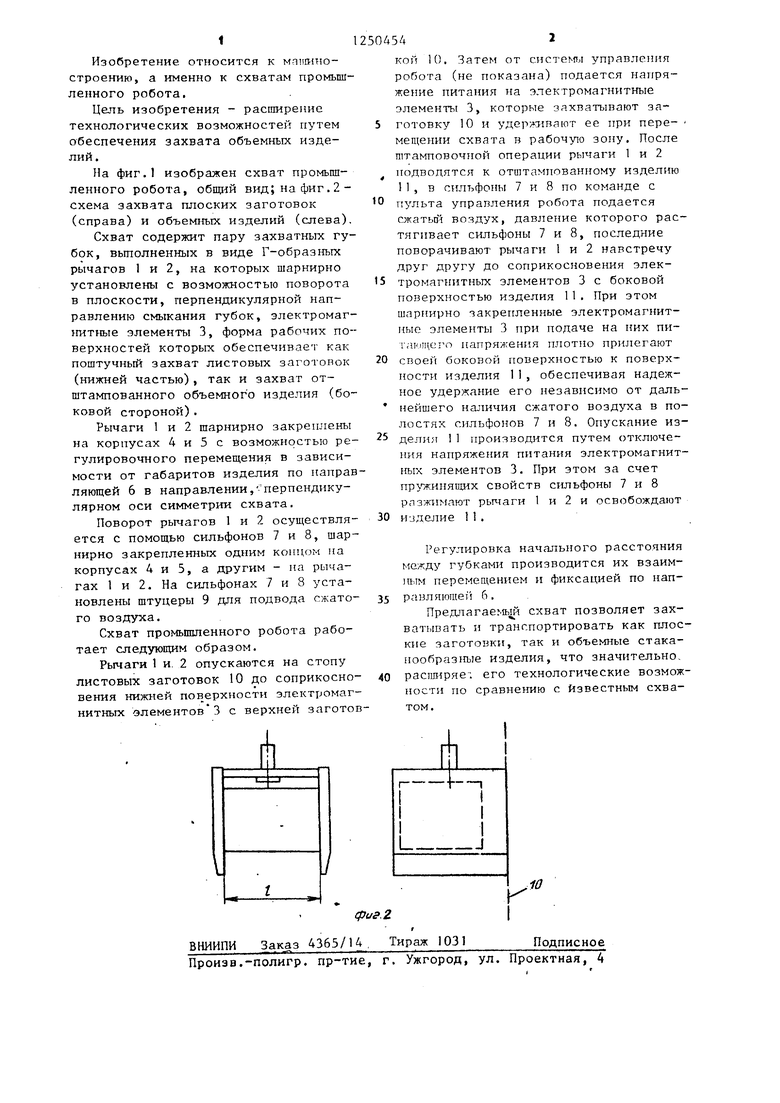
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1990 |
|
SU1779582A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2247649C2 |
| Автоматизированный комплекс для штамповки деталей | 1987 |
|
SU1581436A1 |
| Схват промышленного робота длябОбиН C пРяжЕй | 1979 |
|
SU806406A1 |
| Установка для отделения листовых заготовок от стопы, подачи в пресс и удаления обработанного материала | 1985 |
|
SU1321505A1 |
| Автоматизированный комплекс для листовой штамповки заготовок с внутренним асимметричным контуром | 1984 |
|
SU1253699A1 |
| Схват | 1986 |
|
SU1335450A1 |
| Автоматическая линия | 1978 |
|
SU893584A1 |
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
| Клещевой захват | 1979 |
|
SU1069921A1 |

| Клещевой захват для удержания и перемещения материала | 1982 |
|
SU1013047A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
