1
Изобрегеяпе относится к сварке/ и может быть использовано при отсле- жипании кромкт свариваемого изделия, преимущестиенно при точечной сварке с помощью промьшшениого робота.
Целью изобретения яиляется повы- шен.иа производительности за счет уменьшения количества коррекций положения сварочного инструмента.
Поставленная цель достигается тем, что согласно способу отслеживания кромки изделия сварочным инструментом промьшшенного робота, при котором в процессе поиска кромки и выполнения операции сварки корректи- руют положение сварочного инструмента по смеп1ениям трех механически связанных с ним датчиков, перед, выполнением операции сварки miiKnim и верхний датчики разводят в верти кальной координате по сигналу среднего датчика до грангнд, зоны его устойчивого взаимодействия с кромкой.
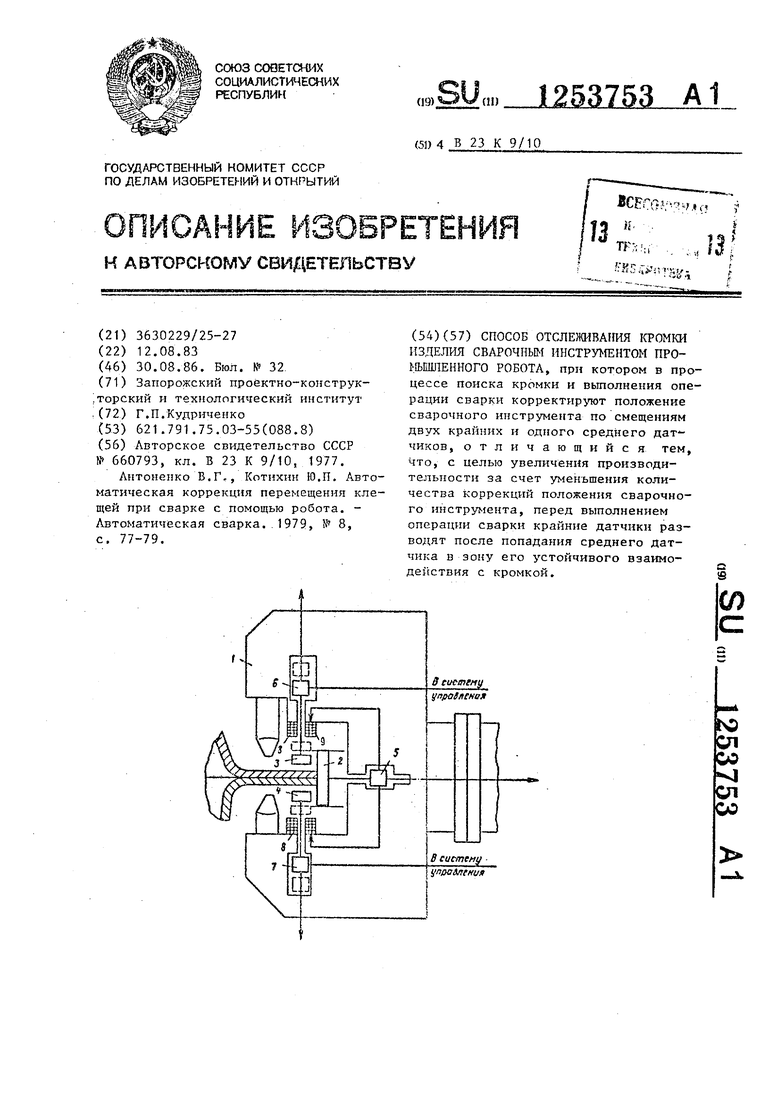
На чертеже изображено устройство для осуществления способа.
Лля осуществления предлагаемого способа на сварочном инструменте 1 установлены с возможностью смещения относительно него датчики 2-4. Смещения датчиков с помощью преобразователей перемеще 1ий 5-7 преобразуют в электрические сигналы. Преобразователь ттеремещений 5. полярность сигналов которого меняется в зависимости от направления перемещений датчика 2, электрически связан с электромагнитами 8 и 9, установленными соосно с датчиками 3 и 4. Датчики 3 и Л совместно с преобразователями перемещений б и 7 с помощью электромагнитов 8 и 9 могут перемещаться относительно сварочного инструмента 1 в вертикальной координат по сигналам датчика 2 и занимать положения, изображенные на чертеже сплошньми или штриховыми линиями. Расстояние между датчиками 3 и 4 в положении изображенном на чертеже гатриховыми линиями, соответствует зоне устройчивого взаимодействия датчика 2 с кромкой.
ВНИИПИ
Заказ 4666/16
Проитв.-лолигр. пр-тие, г. Ужгород, ул. И)
5 0
5
5
о
0
5
0
332
Зона устойчивого взаимодействия датчика 2 с кромкой в вертикальной координате ограничена. Так как существующие сварочные инструт-шнты, предназначенные для точечной сварки, снабжены устройствами для компенса- . ции отклонений свариваемых деталей в направлении пepe eщeния сварочных электро7дов, то максимальная зона устойчивого взаимодействия с кромкой датчика 2 задается в соответствии с компенсационными возможностями сварочного инструмента. Кроме того, эта зона может быть ограничена типом и конструкцией датчика.
Способ ос тцествляют след пощим образом.
Сварочный инстр. ыент 1 с установленными на нем датчиками 2-4 из исходного положения перемещают в начальную точку сварного шва - осуществляют поиск кромки изделия. При этом по сигналам датчиков 3 и 4 производят коррекцию положения сварочного инструмента в вертикальной координате до качала -взаимодействия с кромкой датчика 2, одновремень о со смещением которого по сигналу преобразователя перемеп1 ений 5 разводят датчики 3 и 4 с помощью электромагнитов 8 и 9, Если в результате этих перемещений датчики 3 и 4 достигают границ зог ы устойчивого взаимодействия 2 с кромкой, то вьшолняют операцию сварки, что исключает возьюжность потери взаимодействия датчика 2 с кромкой. Если расстояние между датчиками 3 и 4 меньще или больше зоны устойчивого взаимодействия датчика 2 с кромкой, то производят соответствующую коррекцию ноложенил сварочного инструмента в горизонтальной координате (на кромку или от нее) до достижения датчиками 3 и 4 границ зоны устойчивого взаимодействия датчика 2 с кромкой.
Предлагаемьп способ позволяет повысить производительность за счет уменьшения количества коррекций положения сварочного инстру {ента ,
Предлагаемый способ предполагается использовать на линии роботов для сборки-сварки кабин автомобилей.
Тираж 1(}Г)1
. Ужгород, ул. И)
одпиоте ц к I :. я , 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик положения кромки свариваемого изделия | 1983 |
|
SU1109275A1 |
| Способ наведения сварочного инструмента на шов при контактной точечной сварке промышленным роботом | 1987 |
|
SU1505714A2 |
| Способ наведения сварочного инструмента на шов при контактной точечной сварке промышленным роботом | 1985 |
|
SU1379038A1 |
| Способ программного управления промышленным роботом | 1977 |
|
SU673398A1 |
| Автоматизированный участок для контактной точечной сварки | 1979 |
|
SU863281A1 |
| Способ определения положения кромки изделия относительно рабочего органа промышленного робота | 1977 |
|
SU727420A1 |
| Самоустанавливающаяся головка робота | 1983 |
|
SU1103980A1 |
| Устройство для программного управления промышленным роботом для контактной точечной сварки | 1977 |
|
SU617207A1 |
| Способ сварки и устройство для его осуществления | 1987 |
|
SU1555080A1 |
| АДАПТИВНЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ РОБОТ | 2002 |
|
RU2224637C1 |
| Способ направления рабочего инструмента по стыку | 1977 |
|
SU660793A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Лнтонепко В.Г,, Котихин Ю.П | |||
| Автоматическая коррекция перемещения клещей при сварке с помощью робота | |||
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
| Спускная труба при плотине | 0 |
|
SU77A1 |
