Изобретение относится к машиностроению, а именно, к робототехнике, и может быть использовано для автоматизации установки и смены заготовок в обрабатывающих ячейках.
Цель изобретения - повышение надежности в работе.
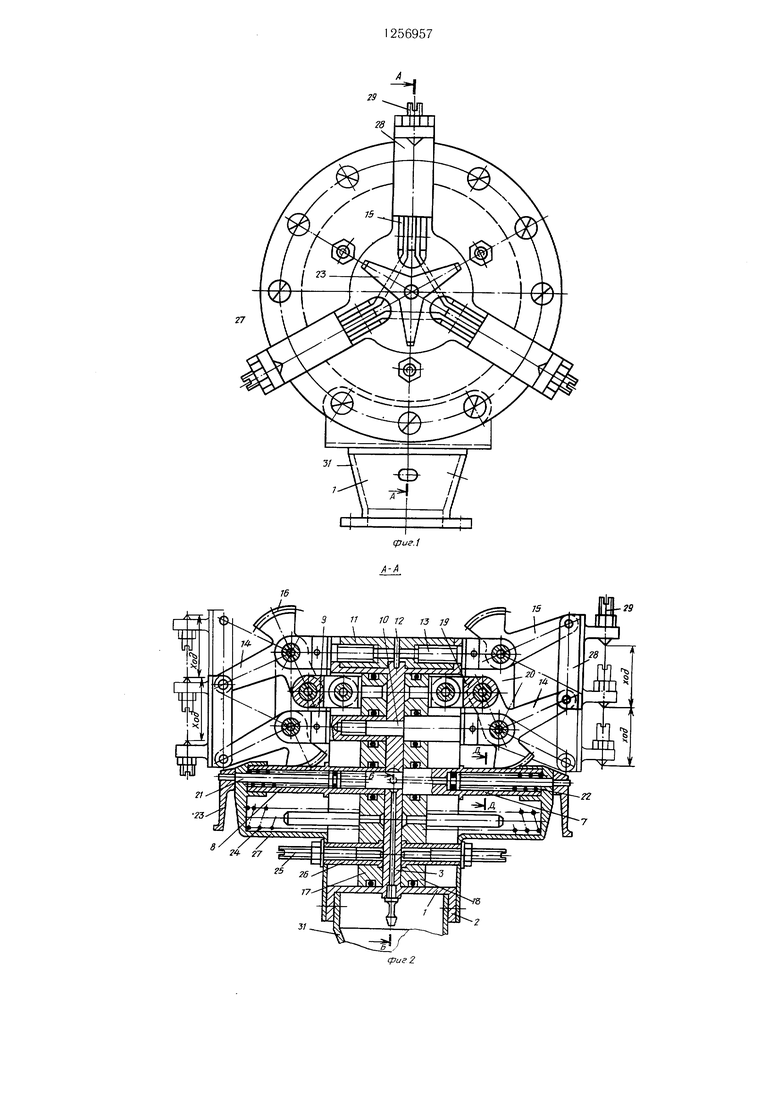
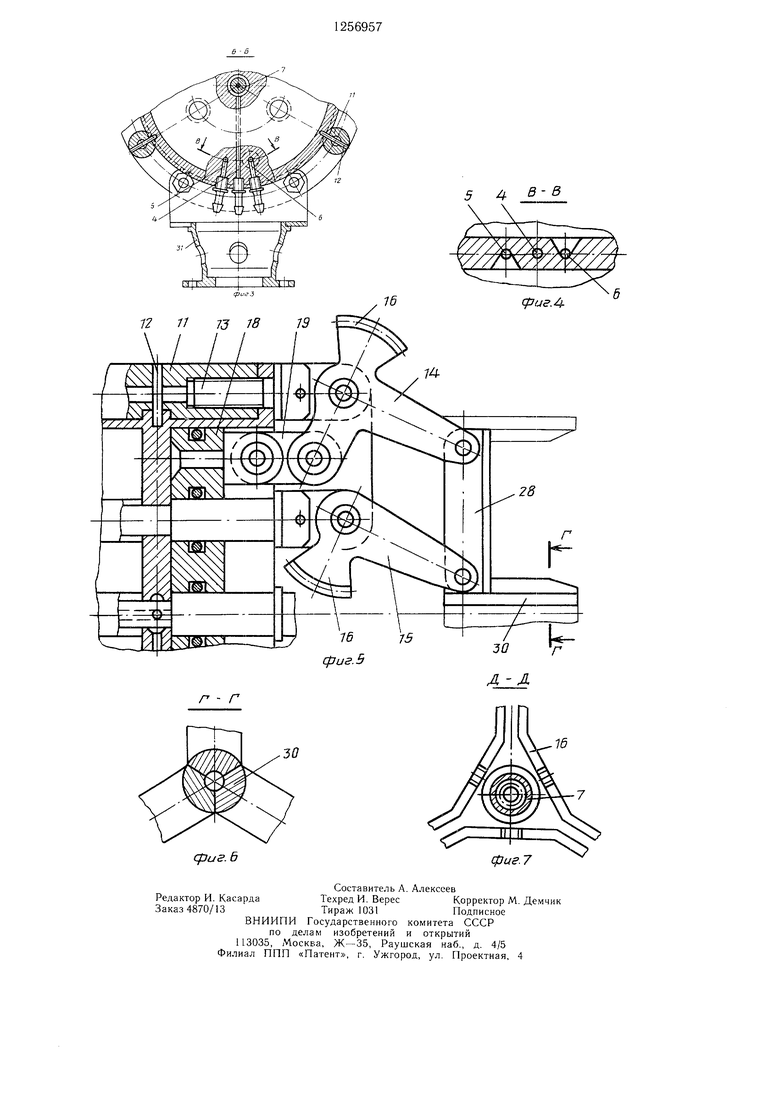
На фиг. 1 изображено устройство , вид со стороны зажимных губок; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2; на фиг. 4 - сечение В-В на фиг. 3; на фиг. 5 - узел настройки губок; на фиг. 6 - сечение Г-Г на фиг. 5; на фиг. 7 - сечение Д-Д на фиг. 2.
Устройство содержит стакан 1 с буртами 2 разделенный на две изолированные полости центральной перегородкой 3. В перегородке 3 выполнены радиальные воздухоподводя- ш,ие каналы 4-6 и сквозные параллельные отверстия. Через центральное отверстие соединяются между собой корпусы 7 и 8, через остальные отверстия - ушковые болты 9 и 10.
По наружной поверхности стакана 1 с равным шагом по окружности расположены соединительные втулки 11, зафиксированные штифтами 12. На втулках 11 закреплены ушковые болты 13. Ушковые болты 9, 10, 13 шар- нирно соединены с рычагами 14 и 15, снабженными коническими зубчатыми секторами 16. В полостях стакана 1 установлены поршни 17 и 18, шарнирно соединенные через серьги 19 с зажимными рычагами 14. Ушковые болты 9, 10, 13 соединены между собой щеками 20, образуя совместно с перегородкой 3 силовую раму, воспринимающую основную нагрузку. В корпусах 7 и 8 установлены штоки 21, отжимаемые в исходное положение пружинами 22. Штоки 21 жестко связаны с досылателями 23 деталей. Поршни 17 и 18 отжимаются в исходное положение пружинами 24. Регулировка длины хода поршней 17 и 18 осуществляется винтами 25, установленными во втулках 26, жестко закрепленных в поршнях 17 и 18. Стакан 1 с торцовых сторон закрыт кожухами 27, которые одновременно являются опорными элементами для пружин 24. Рычаги 14 и 15 шарнирно соединены с зажимными губками 28, снабженными регулировочными винтами 29 (фиг. 2) или колодками 30 (фиг. 5 и 6). Зубчатые секторы 16 рычагов 14 и 15 охватывают корпусы 7 и 8 и входят во взаимное
5
зацепление (фиг. 7). Элементы 14, 15, 20, 28 представляют собой шарнирные параллелограммы. Крепление устройства к руке робота осуществляется через переходник 31. g Устройство работает следующим образом. В зависимости от типа и размеров захватываемых деталей, зажима их по внутренней или наружной поверхности, соответствующим образом устанавливают (настраивают) губки 28 и рычаги 14 и 15 (возмож0 ные варианты расположения губок 28 и рычагов 14, 15 показаны на фиг. 2, 5, тонкий контур). Например, если детали будут захватываться по внутренней поверхности относительно малых размеров, расположение губок 28 и рычагов 14 и 15 соответствует указанному на фиг. 5 и 6 (основной контур). При больших размерах деталей, превышающих ход кулачков, установленных указанным способом, губки устанавливают, как показано на фиг. 5 (тонкий контур),
0 а также на фиг. 2 слева (тонкий контур). При захвате деталей по наружной поверхности рычаги 14 и 15 и губки 28 устанавливают, как показано на фиг. 2 справа (основной и тонкий контур).
При подаче воздуха через один из кана5 лов 5 или 6 (в зависимости от того, какая сторона устройства должна работать) происходит отжим соответствуюшего поршня 17 или 18 от перегородки 3, поворот рычагов 14 и 15 и перемещение губок 28 на зажим детали (не показана).
Разжим детали при установке ее в приспособление происходит следующим образом. Вначале воздух подают по каналу 4, что вызывает перемещение к детали штока 21 с досылателем 23. Затем канал 5 или 6 соединяется с атмосферой и порщень 17 или 18 под действием пружин 24 возвращается в исходное положение. В момент отвода винтов 29 или колодок 30 от детали, досылатель 23 перемещает ее в приспособление до упора.
0 Предлагаемое устройство позволяет брать одну (обработанную) деталь из приспособления и сразу заменять ее другой (необработанной) деталью, с помощью другой стороны схвата.
Наличие пневматических досылателей поз
5 воляет повысить надежность работы схвата и робота, исключить жесткие ударные на- j-рузки.
s
р1,-г.З
12 11 73 18 19 -Е2
/
16
(fue.
сриг.6
фиг.7
Составитель А. Алексеев
Редактор И. КасардаТехред И. ВересКорректор М Демчик
Заказ 4870/13Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектиая, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Схват промышленного робота | 1987 |
|
SU1498609A1 |
| Схват | 1982 |
|
SU1060469A1 |
| Устройство для обработки штучных заготовок | 1990 |
|
SU1814951A1 |
| Захватное устройство | 1986 |
|
SU1351777A1 |
| Устройство для закрепления деталей на автоматизированном станке | 1987 |
|
SU1484555A1 |
| Захват манипулятора | 1979 |
|
SU844262A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Захватное устройство | 1984 |
|
SU1288046A1 |
| Схват манипулятора | 1983 |
|
SU1202864A1 |
| Манипулирующее устройство | 1982 |
|
SU1093544A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
