Изобретение относится к приборостроению и средствам автоматизации, реализует трехпозиционный закон регулирования и может быть использовано в системах с различными исполнительными органами.
Цель изобретения - улучшение динамических характеристик трехпози- ционного регулятора и повышение его статической точности.
На чертеже изображена структурная схема трехпозиционного регулятора.
Регулятор состоит из измерителя рассогласования 1 и двух контуров,
fO
+ 1, а при выходном сиг нале интегратора 10, равном -1, и выходном сигнале управляющего компаратора 6, равном О, на выходе компаратора задержки 7 появляется сигнал -1.
Детекторы сигнала 8 и 9 обладают тем свойством, что один (8) пропускает сигнал положительного знака, а другой (9) - отрицательного для последующего суммирования с различными коэффициентами йа сумматоре 5. В качестве интегратора 10 применяется обычный инвертирующий интегратор.Для ограничения выходного сигнала инте-
|Один из которых формирует положитель- гратора 10 на уровнях О и -1 в его
ный сигнал управления, а второй - отрицательный. Выходом регулятора является выход управляющего сумматора 2.
Контур формирования положительного сигнала управления состоит из трех сумматоров 3, 4 и 5, первого управляющего компаратора 6, первого компаратора задержки 7, детекторов знака сигнала 8 и 9, первого интегратора 10 и йервого ограничителя амплитуды 11.;
Контур формирования отрицательного сигнала управления состоит из трех
20
25
обратную связь включен первый ограничитель амплитуды 11, который начинает проводить ток только при превышении вьЕ содного сигнала интегратора 10 заданных уровней О или -1. Выходной сигнал второго управляющего компаратора 15 принимает значение О, если его входной сигнал больше некоторого отрицательного порога нечувствительности, и значение -1, если вход ной сигнал меньше этого порога.
Выходной сигнал второго компаратора задержки 16 принимает значения +1. Коэффициенты усиления по входам сумсумматоров 12, 13 и 14, второго управ-- матора 13 и характеристики компаратоляющего компаратора 15, второго ком-ра задержки 16 выбраны такими,чтопаратора задержки 16, вторых детекто-бы при нулевом значении выходного
ров знака сигнала 17 и 18, второгосигнала второго интегратора 19 отри
интегратора 19 и второго ограничителя амплитуды 20. Первый управляющий компаратор имеет следующую рабочую характеристику: его выходной сигнал равен -И, если его входное напряжение больше некоторого положительного значения, определяющего зоцу нечувствительности; его выходной сигнал равен О, если его входное напряжение меньше указанного значения.
Выходной сигнал первого компаратора задержки 7 принимает значение +1. Коэффициенты усиления по входам сумматора 4 и характеристика компаратора задержки 7 выбраны такими,чтобы при нулевом выходном сигнале первого интегратора 10 положительный (+1) выходной сигнал управляющего компаратора 6 переводил компаратор задержки 7 в положение +1. Гистерезисная характеристика обеспечивает сохранение (задержку) на выходе компаратора задержки 7 сигнала +1 при значении выходных сигналов интегратора 10, равном -1, и компаратора 6, равном
+ 1, а при выходном сиг нале интегратора 10, равном -1, и выходном сигнале управляющего компаратора 6, равном О, на выходе компаратора задержки 7 появляется сигнал -1.
Детекторы сигнала 8 и 9 обладают тем свойством, что один (8) пропускает сигнал положительного знака, а другой (9) - отрицательного для последующего суммирования с различными коэффициентами йа сумматоре 5. В качестве интегратора 10 применяется обычный инвертирующий интегратор.Для ограничения выходного сигнала инте-
обратную связь включен первый ограничитель амплитуды 11, который начинает проводить ток только при превышении вьЕ содного сигнала интегратора 10 заданных уровней О или -1. Выходной сигнал второго управляющего компаратора 15 принимает значение О, если его входной сигнал больше некоторого отрицательного порога нечувствительности, и значение -1, если входной сигнал меньше этого порога.
Выходной сигнал второго компаратора задержки 16 принимает значения +1. Коэффициенты усиления по входам сумматора 13 и характеристики компарато
цательный выходной сигнал управляюще- го компаратора 15 переводил компаратор задержки 16 в положение -1.Гистерезисная характеристика обеспечивает сохранение на выходе компаратора задержки 16 сигнал -1 при значении выходного сигнала интегратора 19, равном +1, и выходе управляющего компаратора 15, равном -1. При выходном сигнале интегратора 19, равном +1, и выходном сигнале О управляющего компаратора 15 на выходе компаратора задержки 16 появляется сигнал
1-Ь
Детекторы знака сигнала 17 и 18 работают аналогично первым. В качестве второго интегратора 19 применен инвертируюш {й интегратор. Для ограничения выходного сигнала интегратора 19 уровнями О или +1 в обратную связь интегратора включен второй ограничитель амплитуды 20, который начинает проводить ток только при превьш1ении выхода интегратора заданных уровней О или +1.
В замкнутой системе управления регулятор работает следующим образом. Если сигнал рассогласования равен нулю, то регулятор находится в исходном состоянии, т.е. выходные сигналы управляющих компараторов 6 и 15 равны нулю, а следовательно, и выходной сигнал управляющего сумматора 2 равен нулю. Первый компаратор задержки 7. находится в положении -1, второй компаратор задержки в положении +1, выходные сигналы обеих интеграторов равны нулю. Если перечисленные блоки не находятся в исходном состоянии то они придут в него не дольше,чем за период модуляции.
Пусть с измерителя рассогласования 1 подается сигнал положительного знака, превьшающий зону нечувстви-- тельности компаратора 6. Компаратор 6 переходит в положение +1, т.е. на его выходе появляется сигнал +1. На выходе управляющего сумматора 2 также. появляется сигнал +1. Одновременно, первый компаратор задержки 7 перебрасывается в положение +1. После этого выходной сигнал первого интегратора 10 начинает линейно изменяться в отрицательном направлении. Если сигнал рассогласования был небольшим, то через некоторое время, пропорциональное сигналу рассогласования, уменьшающийся выходной сигнал с первого интегратора 10 сравнивается по величине с сигналом рассогласо вания, и компаратор 6 перейдет в нулевое положение, при этом выходной сигнал регулятора также станет равны нулю. Выходной сигнал интегратора 10 будет продолжать уменьшаться до зна- чения -1 в течение времени, равном периоду модуляции. Выходной сигнал интегратора 10, равный -1, перебрасывает компаратор задержки 7 в положение -1, и интегратор 10 быстро (с малой постоянной времени из-за большого коэффициента усиления по второму входу сумматора 5, соединенного с выходом детектора 9) вернется в ну левое состояние. Если сигнал рассогл сования остался, то весь процесс повторяется.
.Таким образом регулятор реализует процесс широтно-импульсной моцуляции выходного сигнала регулятора,заключающийся в том,что через каждый фик- сированный период времени на выходе регулятора появляется управляющий
О
5
5
5
О 5
сигнал постоянной амплитуды, длительность которого пропорциональна рассогласованию.
В общем случае возможны три режима работы регулятора: рассогласование меньше зоны нечувствительности - выходной сигнал равен нулю; рассогласование меньше предельного - каждый период на выходе регулятора формируются импульсы управления, длительность которых пропорциональна рас- .согласованию; рассогласование больше предельного (сигнал -1 с интегратора 10 не может перебросить компаратор 6 в положении 0) - на выходе регулятора непрерьшный управляющий сигнал.
Блок формирования отрицательного сигнала управления состоит из элементов: 12, 15, 13, 16, 17, 18, 14, 19, 20 и работает аналогично при отрицательном рассогласовании.
Как видно из структуры регулятора, в ряде случаев нет нужды в применении управляющего сумматора 2, установленного на входе интегрального исполнительного органа. В этом случае управляющие компараторы 6 и 15 могут непосредственно включить соответствующие исполнительные органы противоположного действия, например нагреватель-холодильник или осушитель- увлажнитель. Отсюда одним из существенных преимуществ регулятора является возможность осуществлять для каждого исполнительного органа отдельно настройку своих оптимальных значений: периода модуляции, зоны нечувствительности, зоны пропорциональной широтно-импульсной модуляции. За счет этого даже при весьма разнородных и несимметричных исполнительных органах возможно получение высококачественного управления.
Положительный эффект от использования предлагаемого изобретения сос- :тоит в том, что системы управления, оснащенные описанным регулятором, . поддерживают управляемый параметр на заданном уровне с ошибкой э 1,5-2 раза меньшей по сравнению с известными регуляторами.
Формула изобретения
Трехпозиционный регулятор, содержащий измеритель рассогласования, выход которого через последовательно включенные первый сумматор и первый управляющий компаратор соединен с первым входом управляющего суммато51290250
pa, a через последовательно включенные второй сумматор и второй управляющий компаратор - с вторым входом управляющего сумматора, выход кото- pqro является выходом регулятора, а 5 также первый интегратор,выход которого соединен с вторым входом первого сумматора, отличающийся тем, что, с целью улучщенпя динамических характеристик и повьпиения ста- О тической точности трехпозиционного регулятора, он дополнительно содержит второй интегратор, третий, четвертый, пятый и шестой сумматоры.
и второй детекторы знака сигнала подключен соогветственно к первому и второму входам четвертого сумматора, выход которого соединен с входом первого интегратора, выход первого интегратора через первый ограничитель амплитуды соединен с третьим входом четвертого сумматора, вход второго компаратора задержки соединен с выходом пятого сумматора, первый вход которого подключен к выходу второго управляющего компаратора, а второй вход - выходу второго интегратора,, выход второго компаратора
первый и второй компараторы задержки,5задержки через параллельно включенпервый и второй ограничители ампли-ные инверсно друг к другу третий и
туды, первый, второй, третий и чет-четвертый детекторы знака сигнала
вертый детекторы знака сигнала, при-подключен соответственно к первому и
чем вход первого компаратора задерж-второму входам щестого сумматора,
ки соединен с выходом третьего сумма-20выход которого соединен с входом втотора, первый вход которого подключен к выходу управляющего компаратора, а второй вход - к выходу первого интегратора, вькод первого компаратора задержки через параллельно вклю ченные инверсно друг к другу первый
ор А. Гулько 7897/43
Составитель Е, Власов Техред М.Ходанич
Корр
«-
Подп
Тираж 885 . ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная 4
и второй детекторы знака сигнала подключен соогветственно к первому и второму входам четвертого сумматора, выход которого соединен с входом первого интегратора, выход первого интегратора через первый ограничитель амплитуды соединен с третьим входом четвертого сумматора, вход второго компаратора задержки соедине с выходом пятого сумматора, первый вход которого подключен к выходу второго управляющего компаратора, а второй вход - выходу второго интегратора,, выход второго компаратора
задержки через параллельно включен25
рогр интегратора, выход которого через второй ограничитель амплитуды соединен с третьим входом шестого сумматора, второго интегратора соединен с вторым входом второго сумматора.
Корректор А. Ильин
«- -.«..-......
Подписное
| название | год | авторы | номер документа |
|---|---|---|---|
| КВАЗИКОГЕРЕНТНЫЙ ДЕМОДУЛЯТОР СИГНАЛОВ КВАДРАТУРНОЙ ФАЗОВОЙ МАНИПУЛЯЦИИ | 2014 |
|
RU2582331C1 |
| Интегральный регулятор | 1982 |
|
SU1297007A1 |
| КВАЗИКОГЕРЕНТНЫЙ МОДУЛЯТОР СИГНАЛОВ КВАДРАТУРНОЙ ФАЗОВОЙ МАНИПУЛЯЦИИ | 2014 |
|
RU2581646C1 |
| ДЕМОДУЛЯТОР ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2008 |
|
RU2393641C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2403607C2 |
| Устройство управления процессом формования пленочных материалов | 1989 |
|
SU1671742A1 |
| КВАЗИКОГЕРЕНТНЫЙ ДЕМОДУЛЯТОР СИГНАЛОВ БИНАРНОЙ ФАЗОВОЙ МАНИПУЛЯЦИИ | 2014 |
|
RU2566813C1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1993 |
|
RU2050686C1 |
| Многоканальный регулятор | 1987 |
|
SU1532895A1 |
Изобретение относится к области приборостроения и средств автоматизации и может быть использовано в системах стабилизации параметров с различньми исполнительными органами. Цель изобретения - улучшение динамических характеристик и повьшение статической точности трекпозицион- ного регулятора, которая достигается введением новых блоков и связей. с помощью которых обеспечивается линейная характеристика регулятора при малых сигналах рассогласования, а при изменениях величины сигнала рассогласования формируются управляющие импульсы с одинаковой длительностью, пропорциональной величине рассогласования. Регулятор состоит из измерителя рассогласования 1 и двух контуров, один из которых формирует положительный сигнал управления а второй - отрицательный. Оба контура подключены к управляющему сумматору 2, выход которого является выходом регулятора.Контур формиро - вания положительного сигнала управления состоит из трех сумматоров 3, 4 и.5, управляющего компаратора 6, компаратора задержки 7, детекторов знака сигнала 8 и 9, интегратора 10 и ограничителя амплитуды 11. Контур формирования отрицательного сигнала управления имеет аналогичный состав. 1 ил. с (Л с to о 1C ел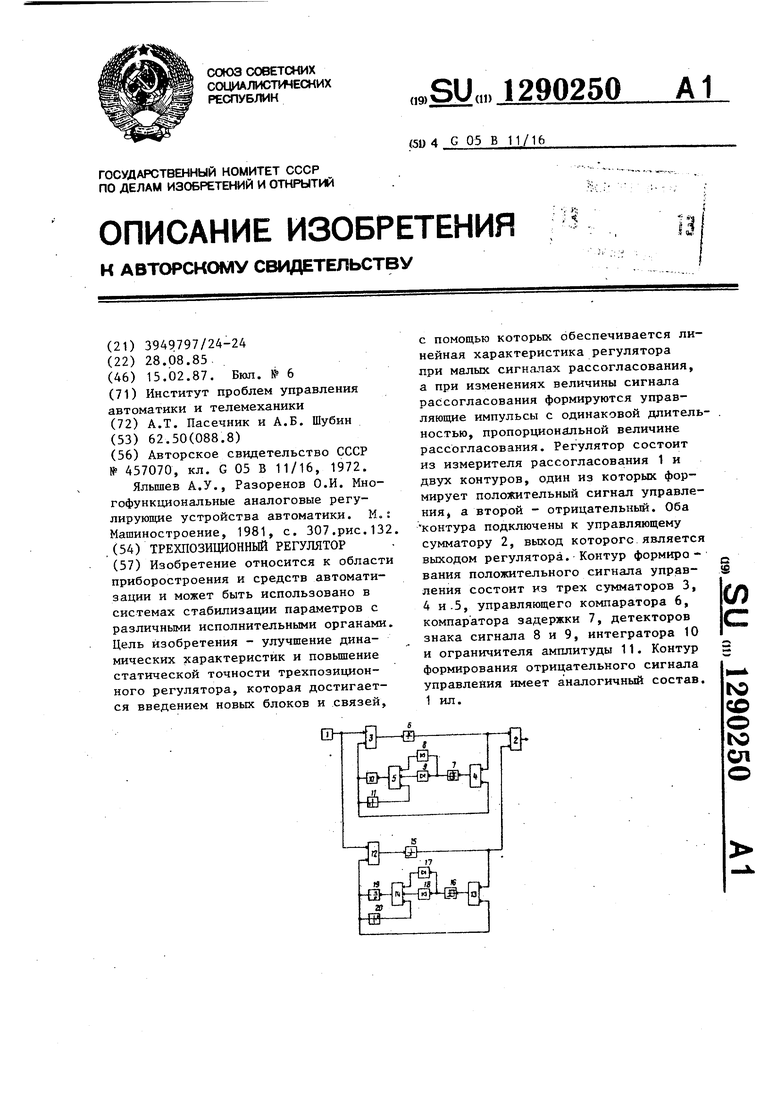
| Импульсный регулятор | 1972 |
|
SU457070A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Ялышев А.У., Разоренов О.И | |||
| Многофункциональные аналоговые регулирующие устройства автоматики | |||
| М.: Машиностроение, 1981, с | |||
| Приспособление для выпечки формового хлеба в механических печах с выдвижным подом без смазки форм жировым веществом | 1921 |
|
SU307A1 |
