Фие.1
Изобретение относится к машиностроению, а именно к захватным устройствам промышленных роботов и манипуляторов, предназначенных для использования в устройствах для подачи листового материала в штампы.
Целью изобретения является повышение надежности работы и, расширение технологических возможностей устрой- ства.
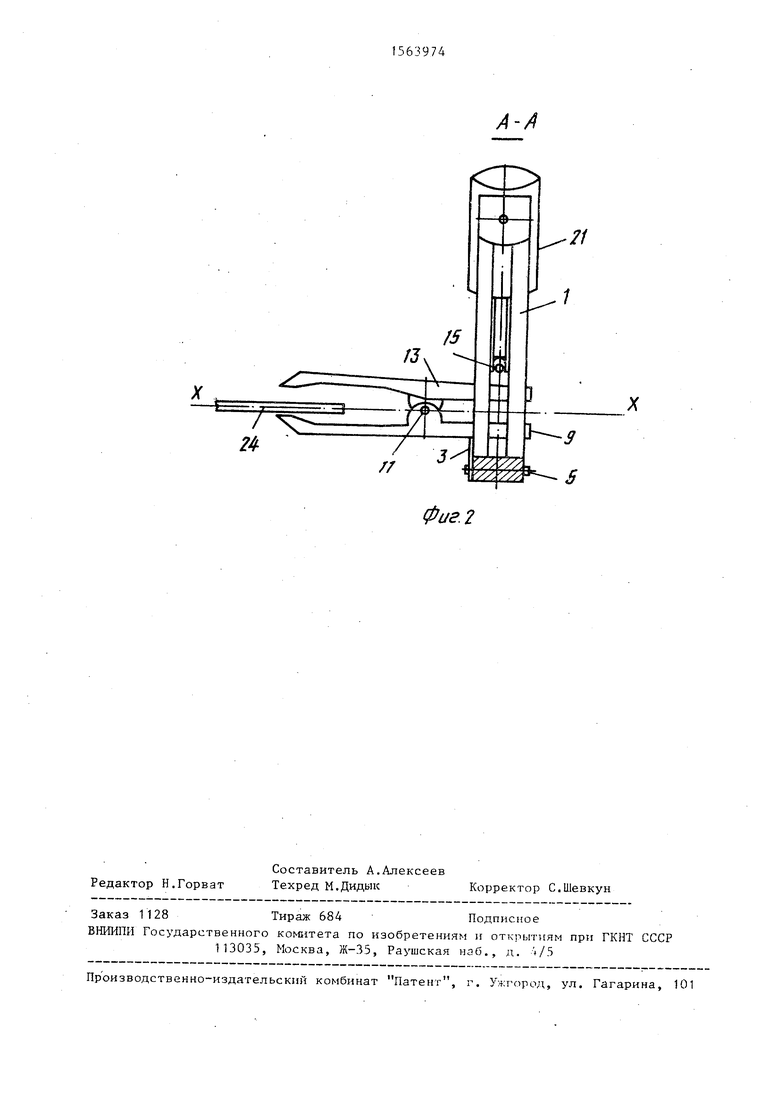
На фиг.1 показано захватное устройство; на фиг.2 - разрез А-А на фиг.1.
Захватное устройство содержит основание 1, корпуса 2 и 3, расположенные на осях 4 и 5, закрепленных на основании 1, корпуса подпружинены пружинами 6 и 7 относительно основания.На корпусах 2 и 3 неподвижно закреплены зажимные губки 8 и 9 с осями 10 и 11, на которых закреплены верхние зажимные губки 12 и 13 с возможностью поворота относительно нижних губок 8 и 9. На верхних губках 12 и 13 располо- жены направляющие 14 и 15, по которым перемещаются ползуны 16 и 17, которые через оси соединены со штоками 18 и
19соответствующих силовых цилиндров
20и 21, закрепленных на основании 1. На основании 1 также закреплены упоры 22 и 23.
Устройство работает следующим образом.
Захватное устройство подводится к листовой детали 24 до расположения края детали между губками 8 и 12, 9 и 13. Для захвата листовой детали срабатывают силовые цилиндры 20 и 21, втягивая штоки 18 и 19, которые через
744
ползуны 16 и 17 приводят в движение губки 12 и 13, поворачивающиеся относительно осей 11 и 10 до захвата детали, после чего усилие продолжающих работать силовых цилиндров передается на корпуса 2 и 3, удерживаемые от перемещения до этого момента пружинами 6 и 7. Корпуса 2 и 3 вместе с захваченной деталью поворачиваются относительно осей 4 и 5 вокруг основания 1 до упоров 22 и 23, изгибая в горизонтальной плоскости листовую деталь 24 вокруг оси Х-Х, параллельной осям 4 и 5, после чего деталь переносится на требуемую позицию.Режим детали происходит в обратном порядке, ф ормула изобретения
Захватное устройство, содержащее основание и два зажимных механизма с приводом сведения зажимных губок, о т- личающееся тем, что, с целью повышения надежности работы и расширения технологических возможностей, зажимные механизмы выполнены каждый в виде поворотного относительно основания корпуса, на котором шарнир- но установлена одна из зажимных губок, снабженная направляющей, на которой размещен ползун, соединенный посредством копира со штоком силового цилиндра привода, корпус которого шар- нирно установлен на основании, причем вторая зажимная губка неподвижно закреплена на корпусе, а зажимные механизмы расположены по разные стороны от основания и подпружинены относительно него.
А-А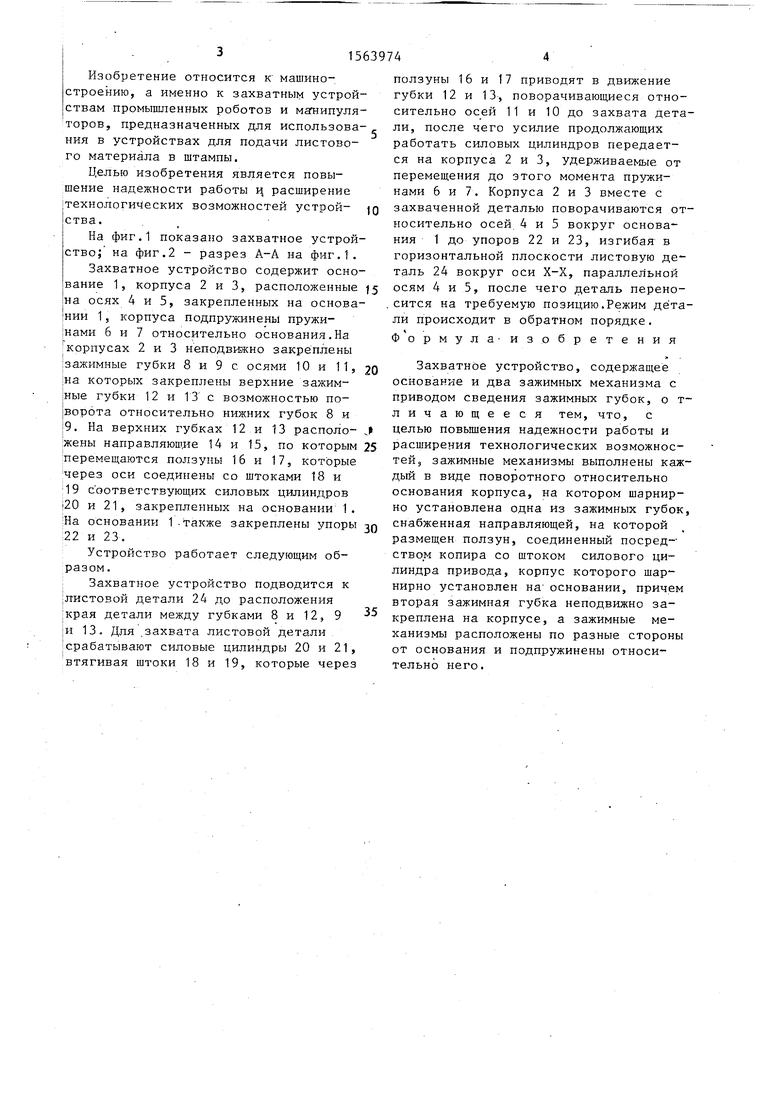
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный захват | 1988 |
|
SU1542796A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Захватное устройство манипулятора | 1987 |
|
SU1458222A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Захватное устройство | 1985 |
|
SU1293021A1 |
| Захватное устройство | 1988 |
|
SU1535716A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Захват | 1980 |
|
SU885001A1 |
| Захватное устройство | 1987 |
|
SU1465312A1 |
Изобретение относится к машиностроению, а именно к захватным устройствам манипуляторов. Целью изобретения является повышение надежности работы и расширение технологических возможностей. Захватное устройство подводится к детали. Штоки 18 и 19 силовых цилиндров 20 и 21 втягиваются, перемещая губки 12 и 13 до захвата детали, после чего усилие от силовых цилиндров передается на корпусы 2 и 3, которые поворачиваются вокруг осей 4 и 5 относительно основания 1 до упоров 22 и 23, изгибая деталь, после чего деталь переносится на требуемую позицию. 2 ил.
21
Фиг. 2
| Захват манипулятора для листового материала | 1984 |
|
SU1291390A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
