Устройство относится к автоматизации и механизации производственных процессов, в частности к устройствам промышленного транспорта, используемого в автоматизированных машиностроительных и приборостроительных производствах.
Цель изобретения - расширение функциональных возможностей за счет обеспечения кантования деталей в любой точке конвейера.
Муфта 16 разомкнута. Вращение, барабану 1Г по часовой стрелке передается от барабана 14 и каната 4 при остановленном канате, связанном с барабаном 13, и палец 22 переводится под платформу 12. Второй шаг. На платформу 12.поставлен груз (фиг. 4). Третий шаг. Муфта 16 замкнута. Барабан 9, вращаясь против часовой стрелки, поворачивает платформу 10 и зажимает груз между двумя платформами. Четвертый шаг.
На фиг. 1 изображено устройство, об- О Муфта 16 замкнута. Раскрываются тормоз- щий вид; на фиг. 2 - схема привода; наныв колодки 18, двигатель 6, вращая вал 15
против часовой стрелки, начинает вращать вместе с валом тяговые барабаны 13 и 14,
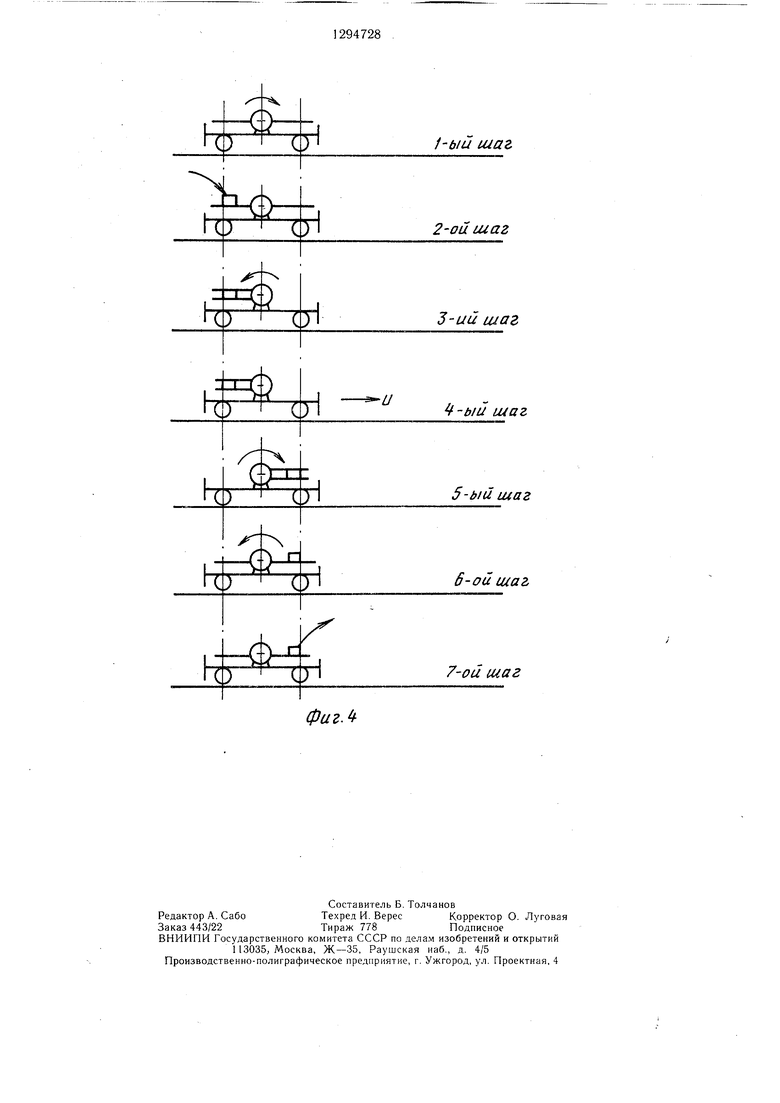
фиг. 3 - схема тормозного приспособления; на фиг. 4 - схема работы предлагаемого устройства.
которые перематывая оба бесконечных каУстройство состоит из несущей рамы 1, ., ната 4, начинают тянуть через отклоняющие ролики 5 транспортную тележку 3 с грузом вправо. Пятый шаг. Муфта 16 разомкнута. Тормозные колодки 18 зажаты. Барабан 11, вращаясь по часовой стрелке, пальцем 22 переворачивает обе платформы
верхняя часть которой имеет направляющие 2 для качения транспортной тележки 3. Транспортная тележка 3 приводится в движение посредством бесконечных тяговых канатов 4 конвейера и отклоняющих роликов
щие ролики 5 транспортн зом вправо. Пятый шаг кнута. Тормозные колодк бан 11, вращаясь по пальцем 22 переворачив
5 приводом 6 (например, электродвигате- 20 на 180° (кантует груз).
Шестой шаг. Муфта мозные колодки 18 заж вращаясь против часово 22 поворачивает проти платформу 12, открывая
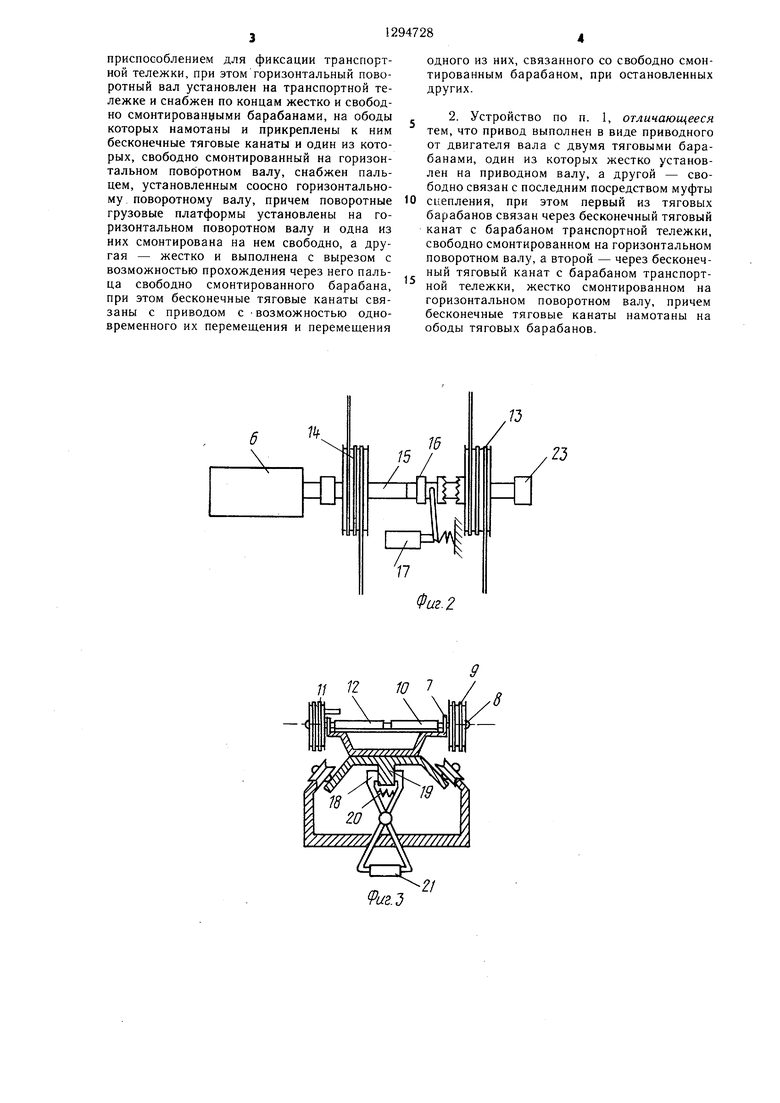
лем с редуктором, которой управляется электронным устройством). Привод установлен в нижней части несущей рамы или в ее торце. На транспортной тележке 3 на стойках 7 в подшипниках укреплен располоШестой шаг. Муфта 16 разомкнута. Тормозные колодки 18 зажаты. Барабан 11, вращаясь против часовой стрелки, пальцем 22 поворачивает против часовой стрелки платформу 12, открывая этим самым груз.
женный поперек продольной оси конвейераСедьмой щаг. Груз снят с платформы 10.
горизонтальный поворотный вал 8, к кото-Если требуется груз транспортировать
влево, то после третьего шага (фиг. 4) выполняется пятый шаг (кантование), а зарому жестко прикреплены барабан 9 и поворотная грузовая платформа 10 и свободно (т.е. могут на нем вращаться) барабан 11 и поворотная грузовая платформа 12. Q На барабаны 11 и 9 намотаны и прикреплены к ним бесконечные тяговые канаты 4. Оба каната, пройдя через отклоняющие ролики 5, сходятся каждый на своем тяговом барабане 13 и 14, на которых они натем четвертый шаг (перемещение влево).
Система управления тяговым электроприводом может быть разомкнутой, в случае использования шагового двигателя, или замкнутой. В последнем случае с осью соединяется датчик 24 угла поворота этой
мотаны. Тяговые барабаны 13 и 14 поса- 35 - U- С помощью датчика 24 осу- жены на вал 15, который соединен с дви-ществляется отсчет углов поворота барабанов 9 и
гателем 6. Тяговый барабан 14 посажен на тяговый вал 15 жестко, а тяговый барабан 13 - свободно и может на валу 15 вра щаться свободно или с помощью муфты 16 сцепления, приводимой в движение, например, электромагнитом 17, может жестко соединяться с валом 15. Для фиксации транспортной тележки в любой точке трассы (трансцортного пути) устройство снабжено тормозным приспособлением, состоя- щим. из длинных (во всю длину трассы) тормозных колодок 18, тормозной планки 19 на транспортной тележке, тормозной пружины (или нескольких пружин) 20 и тормозного электромагнита 21. Расположенный на
9 и 11, а также длины пройденного пути транспортной тележкой. В качестве датчика обратной связи может быть использован, например, фотоимпульсный пре 40 образователь или кольцевой индуктосин.
Формула изобретения
1. Устройство для межоперационной передачи деталей с их кантованием, включающее смонтированный на несущей раме конвейер в виде охватывающих отклоняющие ролики бесконечных тяговых канатов, связанных с приводом, и встроенный в конвейер кантователь в виде двух поворотных
транспортной тележке барабан 11 имеет па- 50 грузовых платформ и расположенного попелец 22, ось которого соосна валу 8, а платформа 10 имеет вырез 23, позволяющий пальцу 22 при вращении барабана 11 проходить через него и не входить в соприкосновение с платформой 10.
Устройство работает следующим образом. Устройство находится в положении, показанном на фиг. 1. Первый щаг (фиг. 4).
рек продольной оси конвейера горизонтального поворотного вала, отличающееся тем, что, с целью расщирения функциональных возможностей за счет обеспечения кантования деталей в любой точке конвейера, оно 55 снабжено подвижной вдоль продольной оси конвейера транспортной тележкой, установленной посредством смонтированных на несущей раме направляющих, и тормозным
Муфта 16 разомкнута. Вращение, барабану 1Г по часовой стрелке передается от барабана 14 и каната 4 при остановленном канате, связанном с барабаном 13, и палец 22 переводится под платформу 12. Второй шаг. На платформу 12.поставлен груз (фиг. 4). Третий шаг. Муфта 16 замкнута. Барабан 9, вращаясь против часовой стрелки, поворачивает платформу 10 и зажимает груз между двумя платформами. Четвертый шаг.
Муфта 16 замкнута. Раскрываются тормоз- ныв колодки 18, двигатель 6, вращая вал 15
которые перематывая оба бесконечных ка ната 4, начинают тянуть через отклоняю ната 4, начинают тянуть через отклоняющие ролики 5 транспортную тележку 3 с грузом вправо. Пятый шаг. Муфта 16 разомкнута. Тормозные колодки 18 зажаты. Барабан 11, вращаясь по часовой стрелке, пальцем 22 переворачивает обе платформы
на 180° (кантует груз).
на 180° (кантует груз).
Шестой шаг. Муфта 16 разомкнута. Тормозные колодки 18 зажаты. Барабан 11, вращаясь против часовой стрелки, пальцем 22 поворачивает против часовой стрелки платформу 12, открывая этим самым груз.
Седьмой щаг. Груз снят с платформы 10.
тем четвертый шаг (перемещение влево).
Система управления тяговым электроприводом может быть разомкнутой, в случае использования шагового двигателя, или замкнутой. В последнем случае с осью соединяется датчик 24 угла поворота этой
- U- С помощью датчика 24 осу- ществляется отсчет углов поворота бараба - U- С помощью датчика 24 осу- ществляется отсчет углов поворота барабанов 9 и
9 и 11, а также длины пройденного пути транспортной тележкой. В качестве датчика обратной связи может быть использован, например, фотоимпульсный пре образователь или кольцевой индуктосин.
Формула изобретения
1. Устройство для межоперационной передачи деталей с их кантованием, включающее смонтированный на несущей раме конвейер в виде охватывающих отклоняющие ролики бесконечных тяговых канатов, связанных с приводом, и встроенный в конвейер кантователь в виде двух поворотных
рек продольной оси конвейера горизонтального поворотного вала, отличающееся тем, что, с целью расщирения функциональных возможностей за счет обеспечения кантования деталей в любой точке конвейера, оно снабжено подвижной вдоль продольной оси конвейера транспортной тележкой, установленной посредством смонтированных на несущей раме направляющих, и тормозным
приспособлением для фиксации транспортной тележки, при этом горизонтальный поворотный вал установлен на транспортной тележке и снабжен по концам жестко и свободно смонтированными барабанами, на ободы которых намотаны и прикреплены к ним бесконечные тяговые канаты и один из которых, свободно смонтированный на горизонтальном поворотном валу, снабжен пальцем, установленным соосно горизонтальному поворотному валу, причем поворотные грузовые платформы установлены на горизонтальном поворотном валу и одна из них смонтирована на нем свободно, а другая - жестко и выполнена с вырезом с возможностью прохождения через него пальца свободно смонтированного барабана, при этом бесконечные тяговые канаты связаны с приводом с -возможностью одновременного их перемещения и перемещения
одного из них, связанного со свободно смонтированным барабаном, при остановленных
других.
2. Устройство по п. 1, отличающееся тем, что привод выполнен в виде приводного от двигателя вала с двумя тяговыми барабанами, один из которых жестко установлен на приводном валу, а другой - свободно связан с последним посредством муфты сцепления, при этом первый из тяговых барабанов связан через бесконечный тяговый канат с барабаном транспортной тележки, свободно смонтированном на горизонтальном поворотном валу, а второй - через бесконечный тяговый канат с барабаном транспортной тележки, жестко смонтированном на горизонтальном поворотном валу, причем бесконечные тяговые канаты намотаны на ободы тяговых барабанов.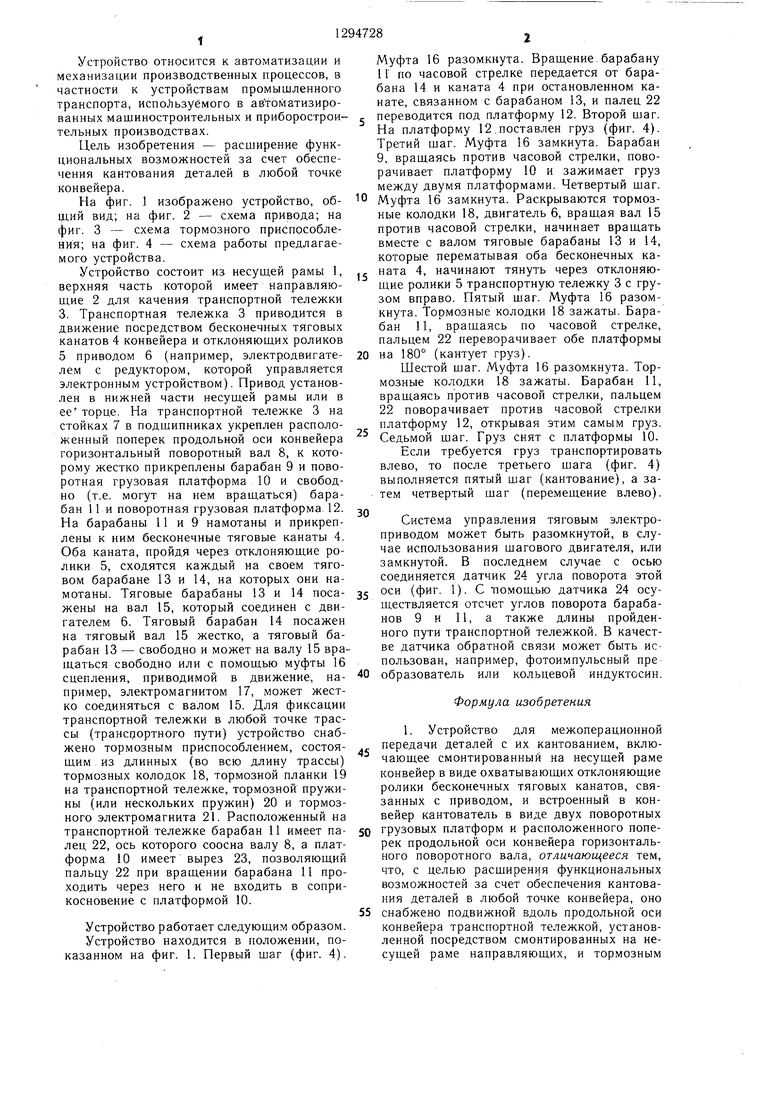
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство межоперационной передачи деталей с их поворотом | 1984 |
|
SU1180327A1 |
| Устройство для передачи штучных грузов к транспортно-складским конвейерам | 1990 |
|
SU1757974A1 |
| Транспортная система | 1982 |
|
SU1167115A1 |
| МАШИНА ДЛЯ ВЫГРУЗКИ ИЗ КРЫТЫХ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ ШТУЧНЫХ ГРУЗОВ | 1968 |
|
SU231374A1 |
| Гравитационный конвейер для штучных грузов | 1988 |
|
SU1511187A1 |
| Реверсивный тележечный конвейер | 1988 |
|
SU1632889A1 |
| Монорельсовая транспортная система | 1987 |
|
SU1438994A1 |
| Телескопическая стрела башенного крана | 1991 |
|
SU1794873A1 |
| Транспортирующее устройство | 1982 |
|
SU1051011A1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2007 |
|
RU2350538C1 |
Изобретение относится к автоматизации производственных процессов промышленного транспорта и расширяет функциональные возможности за счет обеспечения кантования деталей в любой точке конвейера. Устр-во включает смонтированный на несущей раме 1 конвейер в виде охватывающих отклоняющие ролики 5 бесконечных тяговых канатов (ТК) 4, связанных с приводом 6 с возможностью одновременного их перемещения и перемещения одного из них. Вдоль продольной оси конвейера расположена транспортная тележка 3, установленная посредством смонтированных на раме 1 направляющих 2. Один из ТК 4 свободно смонтирован на горизонтальном поX ./ i o . г воротном валу 8, расположенном на тележке 3поперек продольной оси конвейера. Вал 8 снабжен по концам ж.естко и свободно смонтированными барабанами (Б) 9 и 11. На их ободы намотаны ТК 4, а Б 11 имеет палец 22, установленный соосно валу 8. Для фиксации тележки 3 имеется тормозное приспособление, состоящее из тормозных колодок, планки, пружины, электромагнита. В конвейер встроен кантователь в виде двух поворотных грузовых платформ (ПГП) 10 и 12, установленных на валу 8. Одна из них смонтирована свободно на валу 8, а другая - жестко и выполнена с вырезом 23 с возможностью прохождения через него пальца 22. Привод 6 выполнен в виде приводного вала 15 с двумя тяговыми Б 13 и 14. При этом Б 14 посажен на вал 15 жестко, а Б 13 свободно связан с валом 15 посредством муфты. При разомкнутой муфте вращение Б 11 передается от Б 14. Палец 22 переводится под ПГП 12, куда ставят груз. Муфта замыкается и Б 9 поворачивает ПГП 10 и зажимает груз между двумя ПГП. Муфта размыкается. Колодки зажимаются, Б 11 пальцем 22 переворачивает обе ПГП на 180°. 1 з.п. ф-лы. 4ил. П ./ i o . г (Л ГчЭ со 4 Ю 00
7J
Фиг. 2
// 12 10 7
8
иг.7
фигЛ
| Оборудование для ликвидации открытых фонтанов на устье скважины | 1991 |
|
SU1828909A1 |
| Складная решетчатая мачта | 1919 |
|
SU198A1 |
| Русская печь с оборотами | 1925 |
|
SU1931A1 |
| Кантователь | 1978 |
|
SU818998A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
