1
12
Изобретение относится к обработке металлов давлением, в частности к машинам для гибки длинномерных заготовок и труб.
Цель изобретения - повышение надежности.
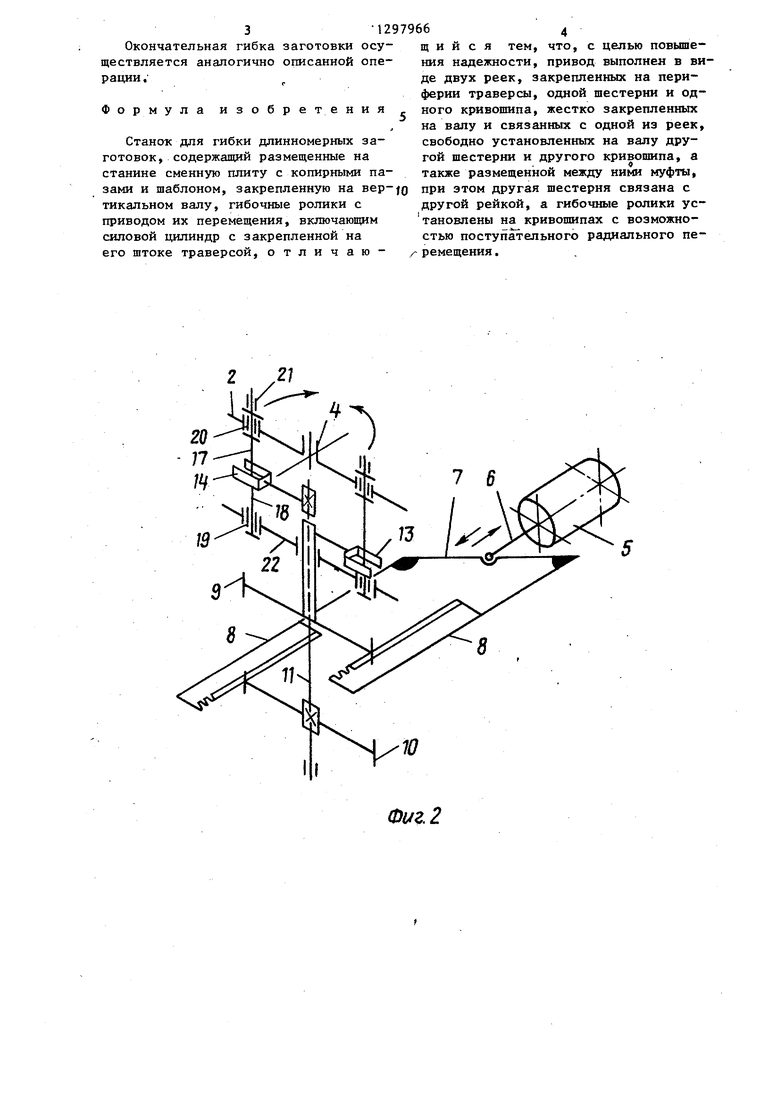
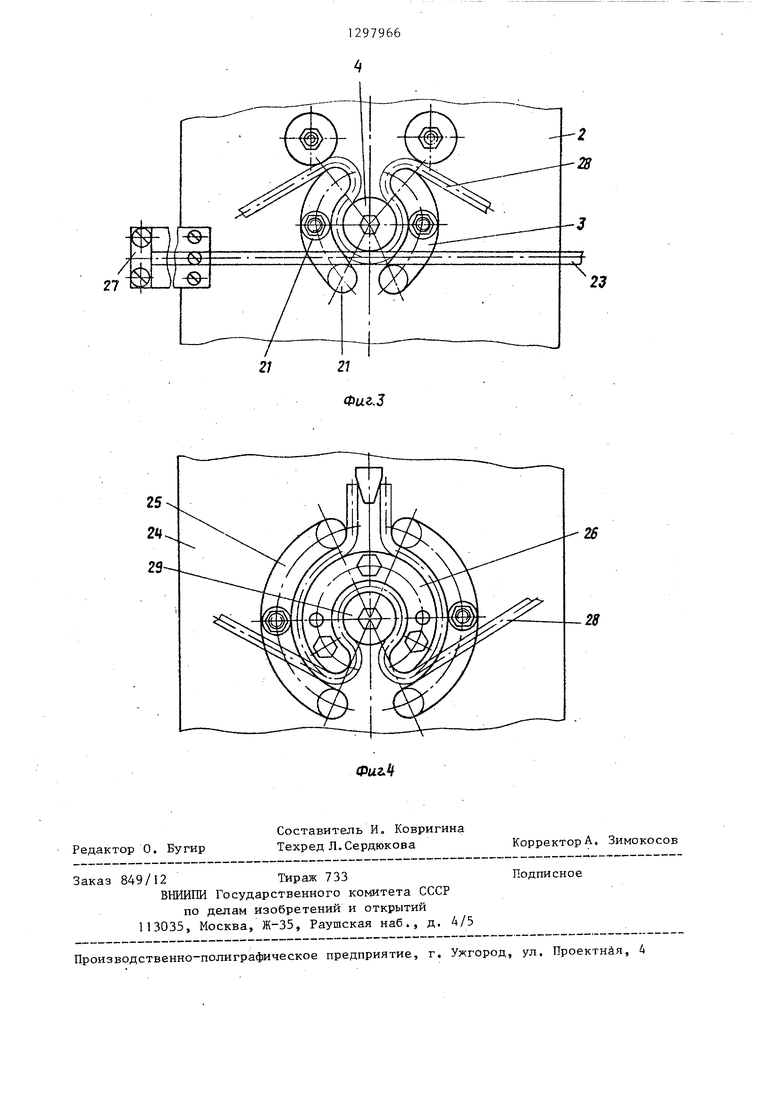
На фиг. 1 изображен предлагаемьй станок, разрез по оси вертикального вала; на фиг. 2 - принципиальная схема станка; на фиг. 3 - плита при на- Ладке на предварительную гибку, вид сверху; на фиг. 4 - то же, при наладке на окончательную гибку.
Станок для гибки длинномерных заготовок содержит станину 1, на кото- рой установлены сменная плита 2 с копирными пазами 3 (фиг. З) с закрепленным на ней шаблоном 4, а также привод перемещения в виде одного общего пневмоцилиндра 5 со штоком 6 (фиг. 2).
На штоке 6 шарнирно установлена траверса 7 с жестко закрепленными двумя рейками 8, каждая из которых установлена с возможностью зацепле- ния с одной из шестерен 9 и 10, размещенных на вертикальном валу 11. Шестерня 9 установлена на валу 11 с возможностью вращения, ее торец яв
ляется полумуфтой кулачковой муфты 12, связывающей ее с к:риво11шпом 13. Шестерня 10 жестко закреплена на валу 11, на другом конце которого жестко закреплен кривошип 14. Кривошипы 13 и 14 имеют возможность встречного вращения вокруг оси вертикального вала 11, совпадающей с осью шаблона 4. Для уменьшения изгибающих моментов кривошип 13 выполнен oxвaтывaюш м, а кривошип 14 охватываемым (фиг. 0 В кривошипах 13 и 14 выполнены прямоугольные пазы 15, в которых с помощью лысок 16 направляются парные гибочные органы 17, каждый из которых состоит из гибочного пальца 18, нап- ра вляющих роликов 19 и 20 и гибочного ролика 21. Причем ролики 20 установлены в копирных пазах 3 плиты 2, а ролики 19 - в опорном копире 22. Подвижное крепление гибочных органов 17 обусловлено необходимостью обеспечения зазора между гибочным роликом 21 и заготовкой 23 при ее установке.
Для обеспечения переналадки станка плита 2 с шаблоном 4 и кривошипы 13 и 14 с установленными на них гибочными органами 17 выполнены сменными с возможностью замены их, в частности, плитой 24 с копирными пазами 25, шаблоном 26, который закреплен на плите 24, и кривошипа уи с гибочными органа ми.
Станок работает следующим образом
Одна из нескольких заготовок 23 (фиг. l) укладываются на плиту 2 (в приведенном примере показана укладка трех заготовок одна над другой) между гибочными роликами 21 и шаблоном
4и вьфавниваются по оси с помощью упора 27. Затем включается подача воздуха в пневмоцилиндр 5 в направлении рабочего хода. Шток 6 пневмоцилиндра 5 перемещается вместе с закрепленными на нем траверсой 7 и двумя рейками 8. При этом шестерни 9 и 10 вращаются во встречном направлении вокруг оси вертикального вала I1 Шестерня 10, жестко закрепленная на валу U, передает вращение охватываемому кривошипу 14. Свободно установленная на валу 11 шестерня 9 через кулачковую муфту 12 передает вращение охватывающему кривошипу 13 и вместе с ним свободно проворачивается на валу 11 о Гибочные пальцы 18 с гибочными роликами 21 приводятся во встречное вращательное движение кривошипами 13 и 14.
Благодаря тому, что направляющие ролики 19 и 20 размещены в копирных пазах, гибочные пальцы 18 получают, помимо вращательного, еще и поступательное радиальное перемещение относительно оси вкртикального вала 11.
При этом гибочные ролики 21, перемещаясь вместе с гибочными пальцами 18, приближаются к заготовке 23 и производят ее гибку вокруг шаблона 4
Возвращение гибочных органов 17 в исходное положение осуществляется при подаче воздуха в пневмоцилиндр
5в направлении, обратном рабочему ходу. При возвращении гибочных роликов 21 в исходное положение они устанавливаются с зазором таким образом, чтобы обеспечить возможность свободной установки обрабатываемой заготовки 23.
В случае необходимости осуществления гибки в два (и более) этапа для наладки станка производится замена сменных элементов, в частности плиты 2 с шаблоном 4 на плиту 24 с шаблоном 26 и кривошипов 13 и 14 с гибочными органами 17. При установке полученной при предварительной гибке заготовки 28 производится ее фиксация с помощью шаблона 26 и пальца 29
3-1297966
Окончательная гибка заготовки осуествляется аналогично описанной опеации.
щ ни де но на св го та пр др та ст /- ре
Формула изобретения
Станок для гибки длинномерных заготовок, содержащий размещенные на станине сменную плиту с копирными пазами и шаблоном, закрепленную на вертикальном валу, гибочные ролики с приводом их перемещения, включающим силовой цилиндр с закрепленной на его штоке траверсой, отличаю
4
щ и и с я тем, что, с целью повышения надежности, привод выполнен в виде двух реек, закрепленных на периферии траверсы, одной шестерни и одного кривошипа, жестко закрепленных на валу и связанных с одной из реек, свободно установленных на валу другой шестерни и другого кривошипа, а также размещенной между ними муфты, при зтом другая шестерня связана с другой рейкой, а гибочные ролики ус- тановлены на кривошипах с возможностью поступательного радиального пе- ремещения.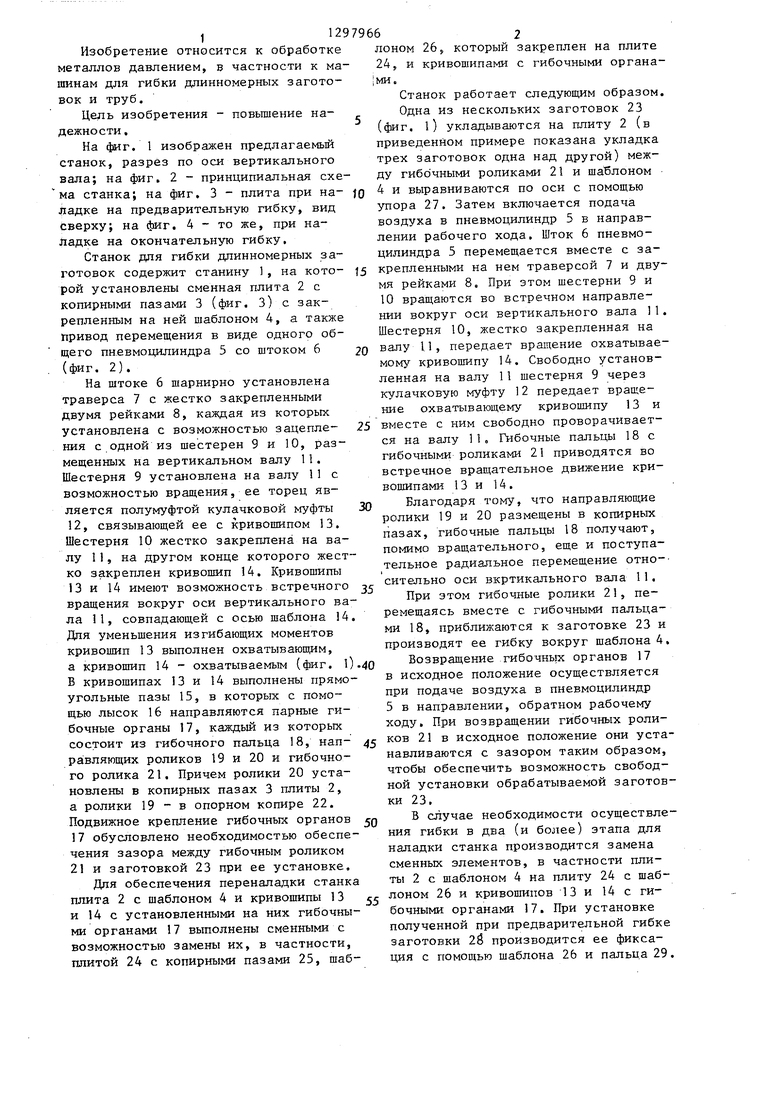
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для гибки длинномерных заготовок | 1982 |
|
SU1057143A2 |
| ПОЛУАВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ГИБКИ ЭЛЕМЕНТОВЗМЕЕВИКОВ | 1971 |
|
SU295590A1 |
| Станок для двусторонней гибки деталей из труб | 1981 |
|
SU997904A1 |
| Станок для изготовления деталей с двумя отогнутыми концами, преимущественно рулей велосипедов | 1988 |
|
SU1530287A1 |
| Станок для двусторонней гибки труб | 1984 |
|
SU1292868A1 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
| Станок для гибки длинномерных изделий | 1980 |
|
SU940913A1 |
| АВТОМАТ ИЗГОТОВЛЕНИЯ ИЗ ПРУТКА, ПОСРЕДСТВОМ ДВУСТОРОННЕЙ ГИБКИ, ДЕТАЛЕЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ ТИПА КЛЕММ РЕЛЬСОВЫХ СКРЕПЛЕНИЙ | 2009 |
|
RU2412772C2 |
| Станок для гибки труб | 1982 |
|
SU1031561A1 |
| Устройство для изготовления арматурных петель из проволоки | 1986 |
|
SU1359050A1 |
Изобретение касается обработки металлов давлением, в частности тру- богибочнЬго производства, и позволяет повысить надежность станков для гибки длинномерных заготовок из труб 2f г 18 го Привод станка выполнен в виде одной шестерни 10 и кривошипа 14, жестко закрепленных на вертикальном валу 1 1 , и другой шестерни 9 и кривошипа 13, свободно посаженных на тот же вал и взаимодействуюш;их посредством муфты. Каждая шестерня находится в зацеплении с соответствующей рейкой 8, жестко закрепленной на траверсе 7, шар- нирно связанной со штоком силового цилиндра 5. Гибочные органы закреплены на кривошипах и имеют возможность радиального поступательного переме- . ш;ения, что обеспечивает совпадение направления усилия гибки и рабочего усилия, действующего на гибочный ролик , 4 ил. S 16 (Л С ьс с со 05 05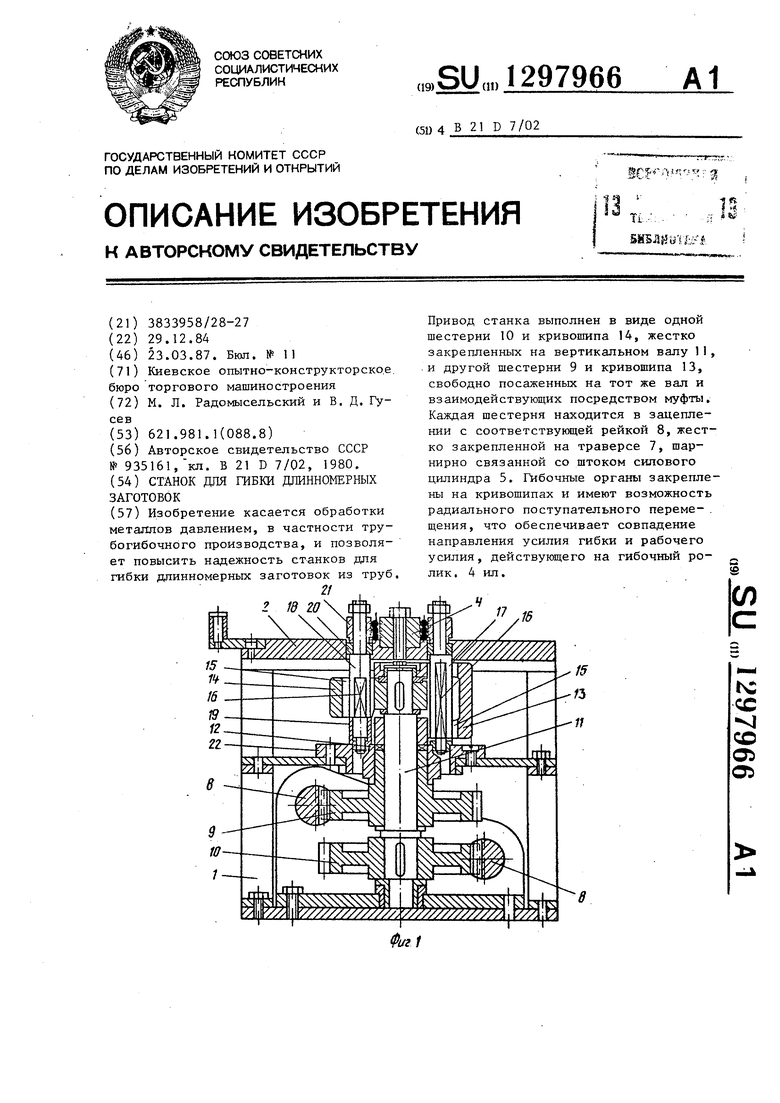
ю
Фиг. 2
25 2 23Редактор О. Бугир
Составитель И. Ковригина Техред Л.Сердюкова
Заказ 849/12Тираж 733
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор А. Зимокосов
Подписное
| Станок для гибки длинномерных заготовок | 1980 |
|
SU935161A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
