13
5, имеющей подвижную тележку 10. На платформе 5 и на раме 16 устр-ва установлены горизонтальные Н 9 и 17. В зоне К 7 на раме 16 смонтирован вертикальный силовой цилиндр(СЦ)18, а К 8 имеет площадку 21 и приводной сталкиватель 24. На штоке СЦ 18 закреплен ползун 19 с пазом. Тележка 10 имеет подпружиненную опору 11, установленную с возможностью размещения в пазу ползуна 19, клещевые захваты 12 с электромагнитами 13 управления и с опорным элементом в верхней час-- ти и вилку 14, установленную с возможностью размещения в ней штока горизонтального СЦ 15 с упорами на штоке. Захваты 12 при подаче изделия
1
Изобретение относится к промышленному транспорту, а именно к устройствам для передачи изделий между конвейерами, расположенными на разных уровнях, например на разных этажах при автоматизации производственных процессов.
Цель изобретения - расширение технологических возможностей устройства путем передачи изделий между ковейерами различных типов и установки их на поддон.
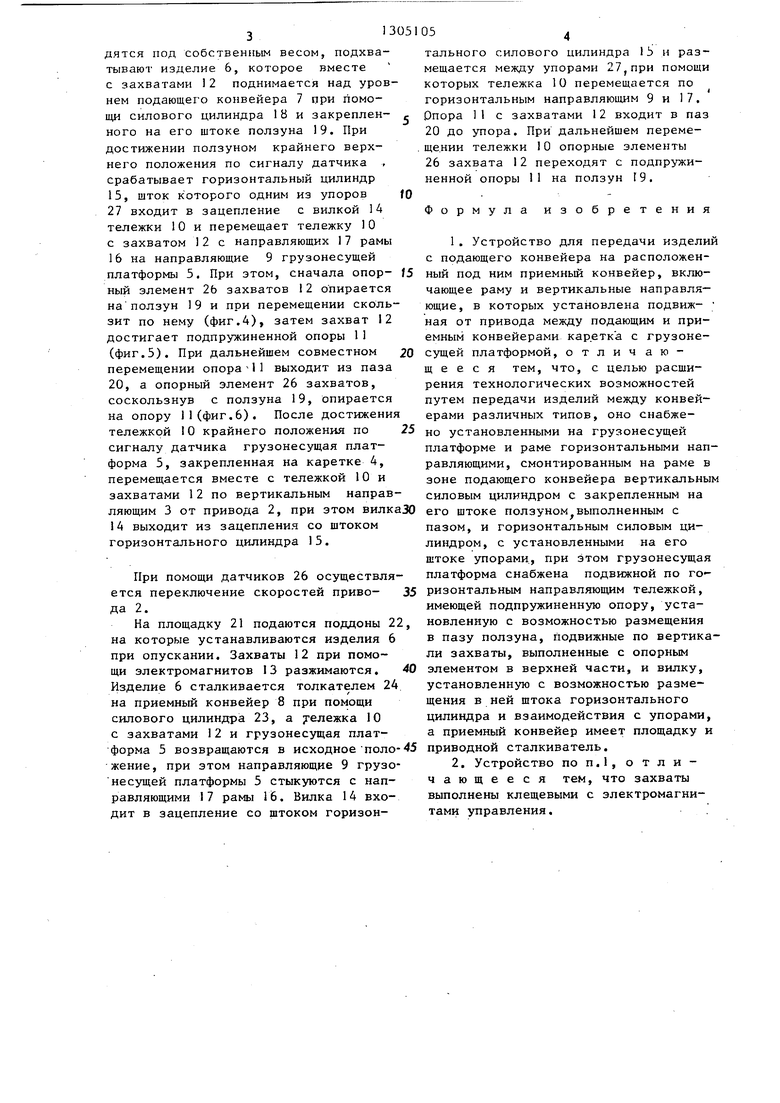
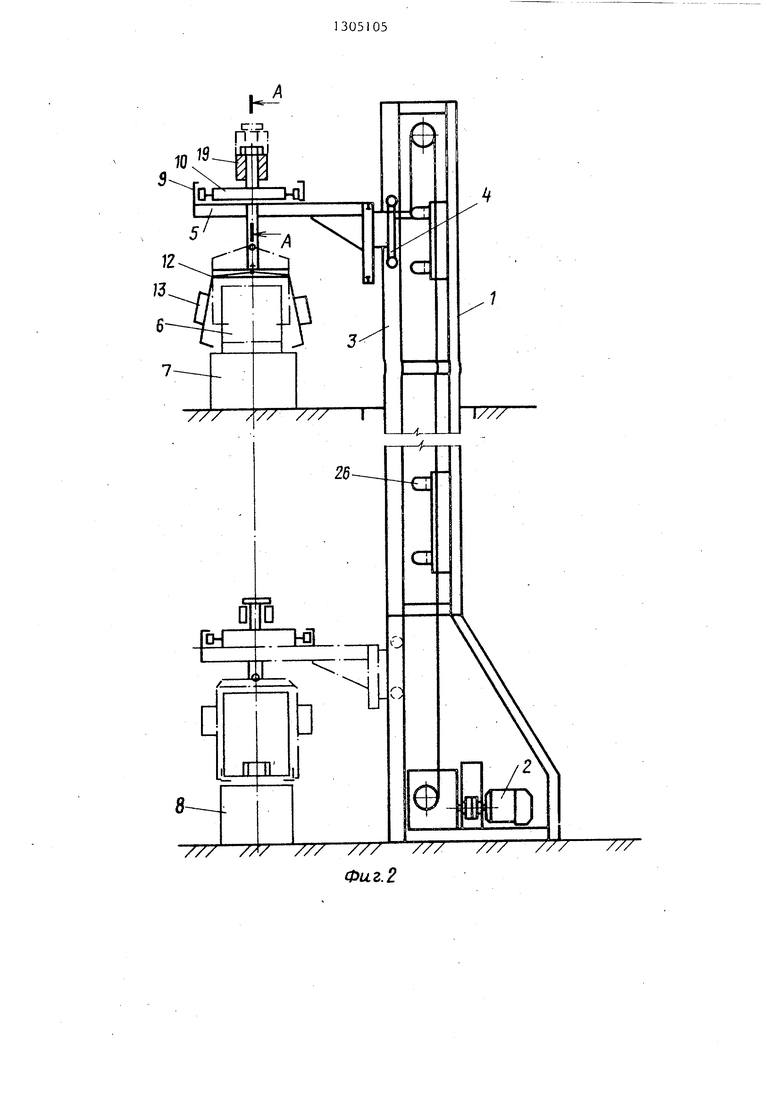
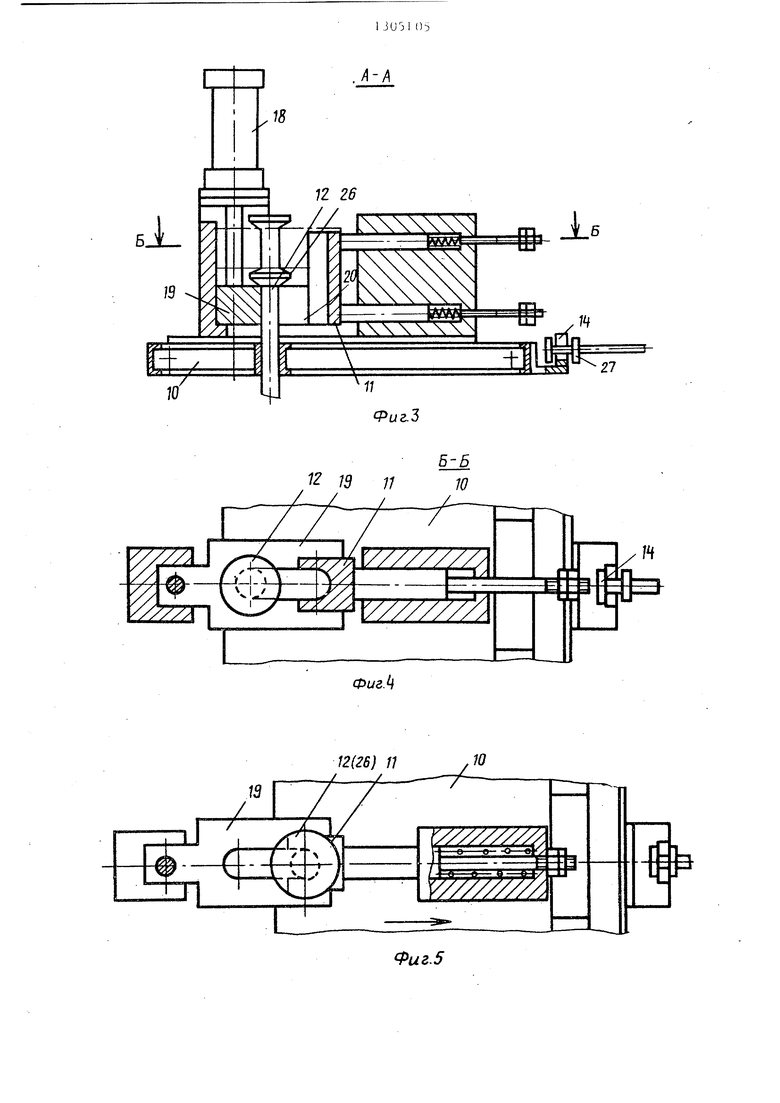
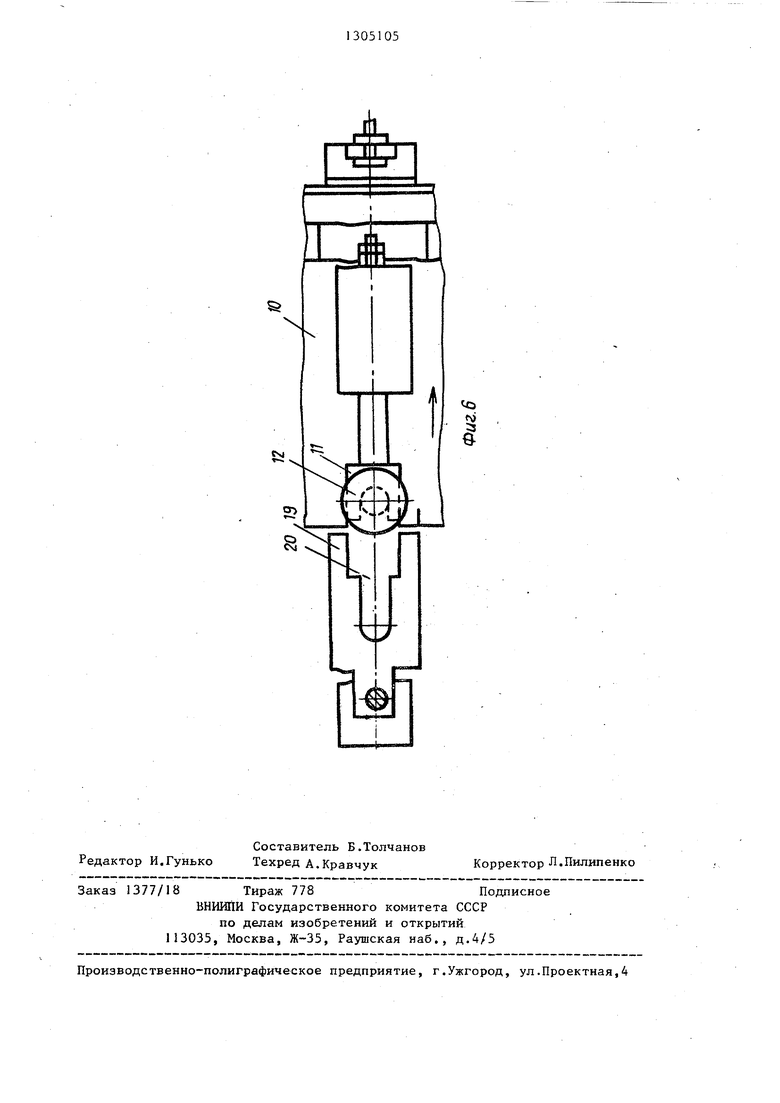
На фиг.1 изображено устройство, общий вид; на фиг.2 - то же, вид сбоку; на фиг.З - разрез А-А на фиг.2; на фиг.4 - сечение Б-Б на фиг.З, при расположении захвата опорным элементом на ползуне; на фиг.З - то же, при расположении захвата между ползуном и подпружиненной опорой; на фиг.6 - то же, при расположении захвата на подпружиненной опоре.
Устройство содержит станину 1 , на которой смонтированы привод 2 и вертикальные направляющие 3 с кареткой 4 и грузонесущей платформой 5, подвижной между подающим изделие 6 конвейером 7 и расположенным под ним приемным конвейром 8, и горизонтальные направляющие 9 и подвижную тележку 10, на которой закреплены подпружиненная опора 1I, клещевые захваты 12, управляемые от электромагнитов 13, и вилка 14, имеющая воз05
6 подхватывают его и поднимаются вместе с ним при помощи С11 18 и ползуна 19. В крайнем верхнем положении ползуна 19 срабатывает СЦ 15. Его шток одним из упоров входит в зацепление с вилкой 14 и перемещает тележку 10 с захватами 12 с Н 17 на Н 9. После достижения тележкой 10 крайнего положения платформа 5 вместе с ней перемещается по Н 3, и вилка 14 выходит из зацепления со штоком СЦ 15. На площадку 21 подаются поддоны 22. На них устанавливают изделие 6 при опускании. Захваты 12 разжимаются и изделие сталкивается на К 8. 1 з.п. ф-лы, 6 ил.
можность соединения со штоком горизонтального силового цилиндра 15, установленного на раме 16, выполненной с горизонтальными направляющими
i 7 и снабженной вертикальным силовым цилиндром 18, на штоке которого закреплен ползун 19 с пазом 20, а на приемном конвейере установлена площадка 21 с поддоном 22 и приводным от силового цилиндра 23 сталки- вателем 24. В зоне подающего конвейера установлен неподвижный упор 25 и размещены горизонтальный силовой Цилиндр 15, горизонтальные направляющие 17 и вертикальный силовой цилиндр 18. В верхней части захватов 12 имеются опорные элементы 26, а на штоке горизонтального силового цилиндра 15 установлены упоры 27.
Устройство работает следующим образом,
В исходном положении грузонесу- щая платформа 5 находится в крайнем верхнем положении, подвижная тележка 10 с захватами 12 расположена над подающим конвейером 7, захваты 12 раскрыты при помощи электромагнитов 13 и подвешены опорным элементом 26 на ползуне 19,. подпружиненная опора 11
находится в пазу 20 ползуна 19.
При подаче изделия 6 до неподвижного упора 25 электромагниты 13 отключаются, клещевины захватов 12 схо
дятся под собственным весом, подхватывают изделие 6, которое вместе с захватами 12 поднимается над уровнем подающего конвейера 7 при помощи силового цилиндра 1Ь и закреплен- , ного на его штоке ползуна 19. При достижении ползуном крайнего верхнего положения по сигналу датчика , срабатывает горизонтальный цилиндр 15, шток которого одним из упоров fO 27 входит в зацепление с вилкой 14 тележки 10 и перемещает тележку 10 с захватом 12с направляющих 17 рамы 16 на направляющие 9 грузонесущей платформы 5. При этом, сначала опор- 15 ный элемент 26 захватов 12 опирается на ползун 19 и при перемещении скользит по нему (фиг.4), затем захват 12 достигает подпружиненной опоры 11 (фиг.5). При дальнейшем совместном 20 перемещении опора 11 выходит из паза 20, а опорный элемент 26 захватов, соскользнув с ползуна 19, опирается на опору 11(фиг.6). После достижения тележкой 10 крайнего положения по 25 сигналу датчика грузонесущая платформа 5, закрепленная на каретке 4, перемещается вместе с тележкой 10 и захватами 12 по вертикальным направляющим 3 от привода 2, при этом вилкаЗО 14 выходит из зацепления со штоком горизонтального цилиндра 15.
При помощи датчиков 26 осуществляется переключение скоростей приво- 35 да 2.
На площадку 21 подаются поддоны 22, на которые устанавливаются изделия 6 при опускании. Захваты 12 при помощи электромагнитов 13 разжимаются. 40 Изделие 6 сталкивается толкателем 24 на приемный конвейер 8 при помощи силового цилиндра 23, а т ележка 10 с захватами 12 и грузонесущая платформа 5 возвращаются в исходное поло-45 жение, при этом направляющие 9 грузо- несущей платформы 5 стыкуются с направляющими 17 рамы 16. Вилка 14 входит в зацепление со штоком горизонтального силового цилиндра 13 и размещается между упорами 27,при помощи которых тележка 10 перемещается по горизонтальным направляющим 9 и 17. Опора 11 с захватами 12 входит в паз 20 до упора. При дальнейшем перемещении тележки 10 опорные элементы 26 захвата 12 переходят с подпружиненной опоры 11 на ползун F9.
Формула изобретения
1.Устройство для передачи издели с подающего конвейера на расположенный под ним приемный конвейер, включающее раму и вертикальные направляющие, в которых установлена подвиж- ная от привода между подающим и приемным конвейерами каретка с грузонесущей платформой, отличающееся тем, что, с целью расширения технологических возможностей путем передачи изделий между конвейерами различных типов, оно снабжено установленными на грузонесущей платформе и раме горизонтальными направляющими, смонтированным на раме в зоне подающего конвейера вертикальны силовым цилиндром с закрепленным на его штоке ползуном выполненным с пазом, и горизонтальным силовым цилиндром, с установленными на его штоке упорами., при этом грузонесущая платформа снабжена подвижной по горизонтальным направляющим тележкой, имеющей подпружиненную опору, установленную с возможностью размещения
в пазу ползуна, подвижные по вертикали захваты, выполненные с опорным элементом в верхней части, и вилку, установленную с возможностью размещения в ней щтока горизонтального цилиндра и взаимодействия с упорами, а приемный конвейер имеет площадку и приводной сталкиватель.
2.Устройство по п.1, о т л и - чающееся тем, что захваты выполнены клещевыми с электромагнитами управления.
10
/// /// ///
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи изделий с одного конвейера на другой | 1988 |
|
SU1518248A1 |
| Устройство для передачи изделий с одного конвейера на другой | 1988 |
|
SU1602825A2 |
| Устройство для передачи изделий с подающего конвейера на приемный | 1985 |
|
SU1316952A1 |
| Тележечный конвейер | 1988 |
|
SU1578053A1 |
| Устройство для загрузки и разгрузки подвесного конвейера | 1986 |
|
SU1323482A1 |
| Цепной тележечный конвейер | 1977 |
|
SU745812A1 |
| Транспортный конвейер | 1988 |
|
SU1609738A1 |
| Шаговый конвейер | 1977 |
|
SU662445A1 |
| Устройство для загрузки тележечного конвейера | 1976 |
|
SU659479A1 |
| Шаговый конвейер | 1990 |
|
SU1787880A1 |
Изобретение относится к промышленному транспорту и позволяет расширить .технологические возможности устр-ва путем передачи изделий между конвейерами (К) 7 и 8 различных типов и установки его на поддон. В вертикальных направляющих ( Н ) .3 устр-ва установлена подвижная от привода между подающим К 7 и приемным К 8 каретка 4 с грузонесущей платформой J5 i (Л оо о сд ел 
Фиг. 2
./1-Л
27
ФигЗ
Б-Б
ю п ю / / / /
Щ
ФигМ
12(26} 11
.5
Ч
Редактор И.Гунько
Составитель Б.Толчанов Техред А.Кравчук
Заказ 1377/18 Тираж 778Подписное
БНИИЙИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
- - -- ---- ------- ---------- - --- - -.- -.«...--. ... . .«.
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
Корректор Л.Пилипенко
| Перегрузочное устройство | 1983 |
|
SU1097544A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| 1971 |
|
SU418403A1 | |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
