f5
20
25
Изобретение относится к конструкции машин упаковочных роторного типа и может быть использовано в различных областях техники для обеспечения поворота роторов этих машин на строго 5 определенньй угол.
Цель изобретения - упрощение конст- руктдии и повьшение надежности работы привода.
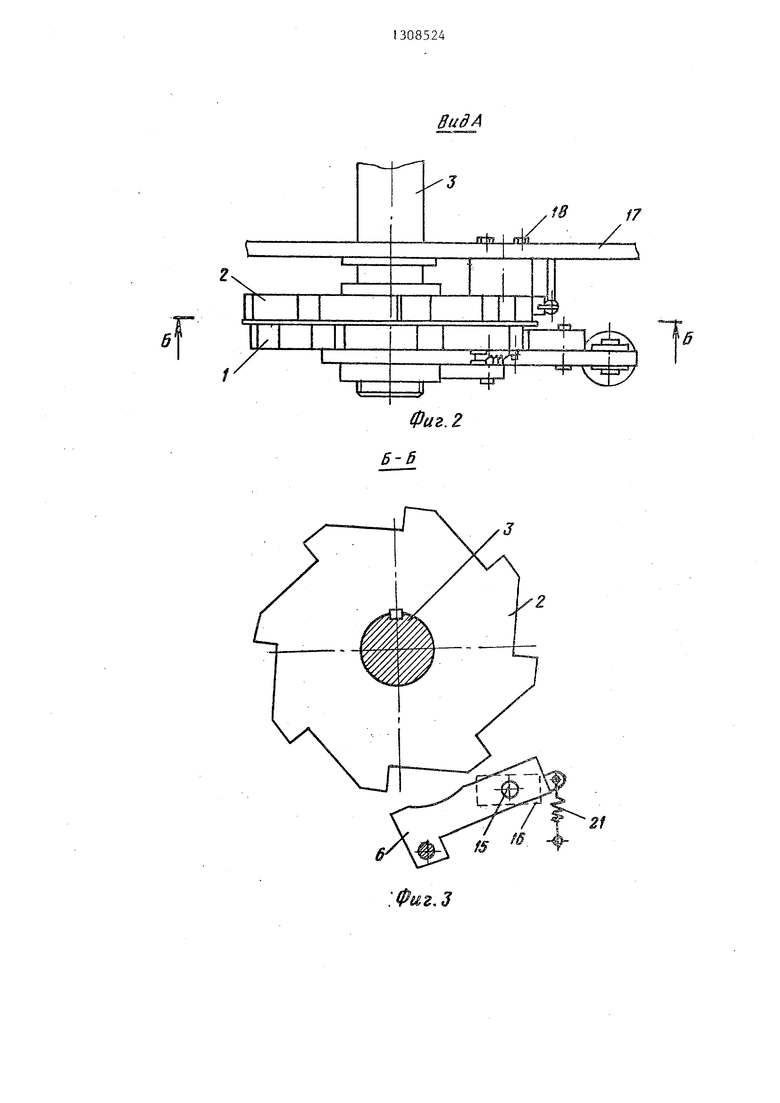
На фиг.1 изображен привод, общий О вид; на фиг.2 - вид А на фиг.1; на фиг.З разрез Б-Б на фиг,2; на фиг.4- разрез В-В на фигЛ; на фиг.З - вид Г на фиг.4.
Привод включает позиционный механизм, состоящий из храпового колеса 1 и зеркально расположенного по отношению к нему храпового колеса 2, жестко закрепленных на ведомом валу 3, приспособления периодического поворота позиционного механизма, содержащего кулису 4 и установленную на ней собачку 5 и приспособления фиксации позиционного механизма, содержащего ограничитальнзгю собачку 6 с пальцем 7 и рейку 8, в продольный паз 9 которой входит палец 7.
Кулиса 4 серьгой 10 связана со штоком 11 пневмоцилиндра 12. Рейка 8 осью 3 и собачка 5 осью 14 соединены с кулисой 4. Собачка 6 установлена на оси 15, закрепленной в корпусе 16, который крепится к станине 17 болтами 18, проходящими через пазы 19 в станине 17. Собачки 5 и маются к храповым колесам I и 2 пружинами 20 и 21, однако в исходном положении привода собачка 6 отведена от храпового колеса 2, так как ее палец 7 упирается в колец паза 9 рейки 8. Пневмоцилиндр 12 закреплен на станине 18 (не показано).
Вместо пневмоцилиндра 12 может быть использован другой механизм,, обеспечивающий периодический поворот 45 ку,-1исы 4 на заданный угол.
Привод работает следующим образом. Момент остановки привода регулируют путем изменения положения оси 15 собачки 6. Для этого отпускают 50 болты 18, корпус 16 с осью 5 и собачкой 6 передвигают вдоль пазов 19 в станине 17 в требуемое положение, после чего болты 18 затягивают. При этом меняется положение пальца 7 в 55 пазу 9 рейки 8,
Шток II пневмоцилиндра 12, воздействуя на кулису 4 через серьгу 10, собачкой 5 начинает поворачивать храповое колесо 1 позиционного механизма вместе с ведомым валом 3 и храповым колесом 2. Ограничительная собачка 6, которая до этого бьша отведена от храпового колеса 2 рейкой 8, под действием пружины 21 поворачивается и соприкасается с ним после того, как очередной зуб храпового колеса 2 1чинует точку соприкосновения.
Поворот храповых колес 1 и 2 и вала 3 продолжается до тех пор, пока собачка 6, скользя по тыльной стороне зуба хргшового колеса 2, не упрется в следующий зуб. Вал 3 вместе с позиционным механизмом останавливается, причем собачки 5 и 6 фиксируют его в строго определенном положении. Время выстоя вала 3 обуславливается технологическим циклом. После окончания выстоя вала 3 шток 11 пневмоцилиндра 12 возвращается в исходное положение вместе с кулисой 4, вводя собачку 5 в зацепление со следующим зубом храпового колеса 1. Б конце хода штока 11 кулиса 4 через рейку 8 воздействует на палец 7, вьгаодя собачку 6 из зацепления с храповым колесом 2, после чего цикл повторяется. Таким образом, укрепленный на ведомом валу позиционный механизм, состоящий из двух зеркально установленных храповых колес и приспособления фиксации механизма после поворота, 6 поджи- 35 включающего рейку с продольным пазом и подпружиненную собачку, имеющую палец, размещенный в пазу рейки, упрощают конструкцию привода прерывистого движения роторов упаковочных машин. Простота конструкции обеспечивает надежность работы привода.
30
40
Формула изобретения
Привод прерывистого движения роторов упаковочных машин, содержащий укрепленный на ведомом валу позиционный механизм, приспособление периоди- ческо1:о поворота последнего и приспособление фиксации позиционного механизма, включающее кулису, отличающийся тем, что, .с целью упрощения конструкции и повышения надежности, позиционный механизм состоит из двух зеркально установленных храповых колес, а приспособление фиксации включает рейку с продольным пазом и подпружиненную собачку, имеющую палец, размещенный в пазу рейки.
20
35
25
35
35
30
35
40
Формула изобретения
Привод прерывистого движения роторов упаковочных машин, содержащий укрепленный на ведомом валу позиционный механизм, приспособление периоди- ческо1:о поворота последнего и приспособление фиксации позиционного механизма, включающее кулису, отличающийся тем, что, .с целью упрощения конструкции и повышения надежности, позиционный механизм состоит из двух зеркально установленных храповых колес, а приспособление фиксации включает рейку с продольным пазом и подпружиненную собачку, имеющую палец, размещенный в пазу рейки.
ВидА
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод прерывистого движения роторов упаковочных машин | 1980 |
|
SU975504A1 |
| Привод прерывистого движения роторов упаковочных машин | 1986 |
|
SU1366445A1 |
| Автомат для насекания надфилей | 1979 |
|
SU772760A1 |
| Устройство для группирования стержнеобразных изделий | 1981 |
|
SU986823A1 |
| Привод прерывистого движения роторов и конвейеров упаковочных машин | 1985 |
|
SU1353692A1 |
| Привод прерывистого движения роторов и конвейеров упаковочных машин | 1985 |
|
SU1274970A1 |
| Устройство для перемещения материала на вышивальной машине | 1973 |
|
SU501125A1 |
| Устройство для нанесения клея на кромки обувных деталей из мягких материалов | 1990 |
|
SU1784202A1 |
| Устройство для нанесения клея на кромки обувных деталей | 1988 |
|
SU1574202A1 |
| Шурупозавертывающий многошпиндельный станок | 1988 |
|
SU1608041A1 |

Изобретеьше относится к технике для обеспечения поворота ротора упаковочных машин на строго определенный угол. Цель изобретения - упрощение конструкции и повьшение надежности. Кулисой 4 периодически поворачивают установленные на ведомом валу 3 храповые колеса позиционного механизма (ПМ). Подпружиненная собачка 6 фиксирует ПМ, упираясь в очередной зуб храпового колеса. Момент фиксации ПМ регулируют изменением положения пальца 7 собачки 6 в продольном пазу 9 рейки 8 приспособления фиксации. 5 ил. (Л с Риг.1 3д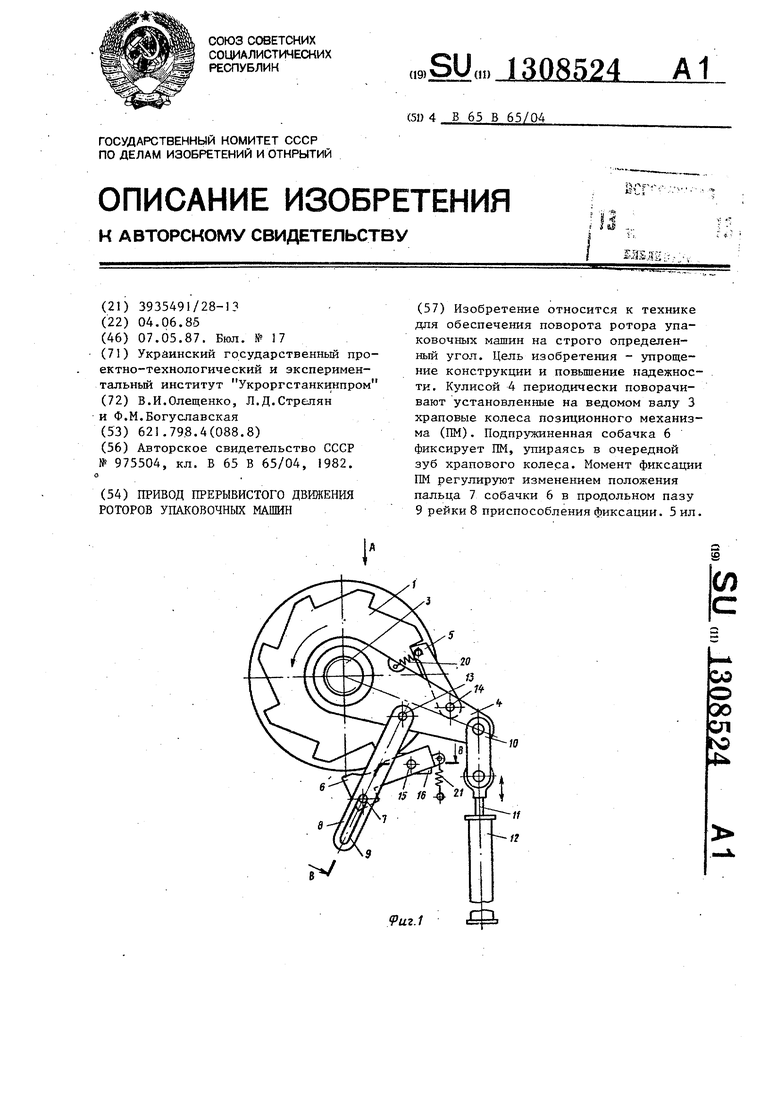
1В 19
-.7
.-7
21
-.7 . 5
-7
8
S
игЛ
Вид г
Составитель Е.Камаганова Редактор А.Шандор Техред Л.Олейник Корректор Е.Рошко
1670/16
Тираж 646Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий П3035, Москва, Ж-35, Ра ушская наб. , д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная Г
9Its. 5
| Привод прерывистого движения роторов упаковочных машин | 1980 |
|
SU975504A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| О | |||
