11
Изобретение относится к машиностроению, в частности к манипуляторам для автоматизации производственных процессов, и может быть исйользо вано для перегрузки .обуви с конвейера на конвейер.
Целью изобретения является повышение надежности за счет упрощения механизмов перемещения захватного органа.
На фиг.1 показан манипулятор, общий вид; на фиг.2 - разрез А-А на фиг,1; на фиг.З - разрез Б-Б на фиг.1; на фиг.4 - разрез В-Б на фиг.1; на фиг.З - разрез Г-Г на фиг.4.
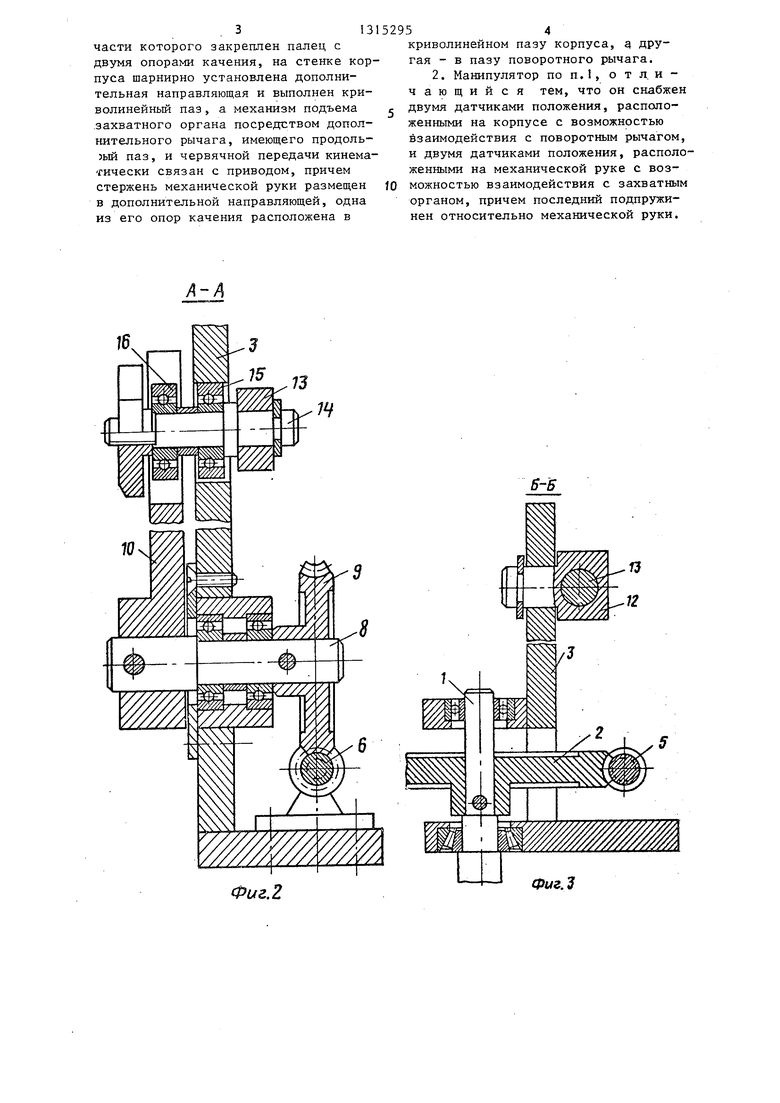
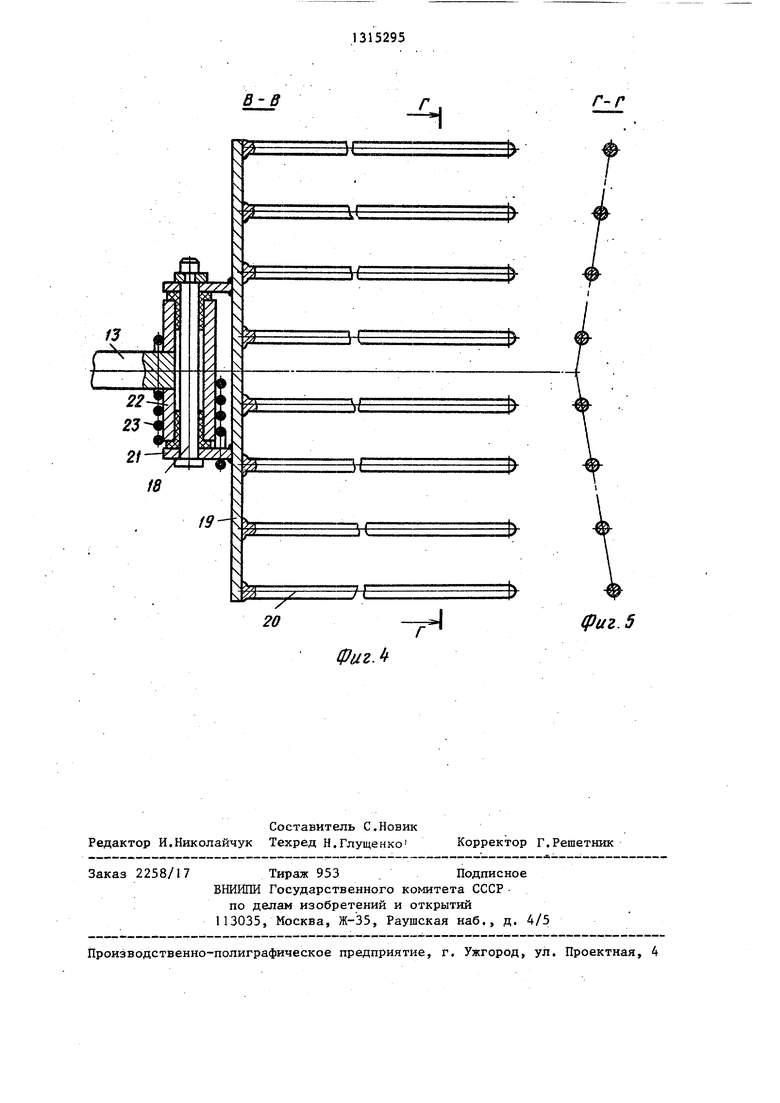
На опорном стержне 1 (вале) манипулятора закреплено червячное колесо 2 и смонтирован с возможностью поворота корпус 3, на опорной поверхности которого закреплен реверсивный двигатель 4 с двумя выходными валами, которые соединены с червяками 5 и 6, находящимися в опорах 7. На стойке корпуса смонтирован вал 8, на котором закреплены червячное колесо 9 и поворотный рычаг 10 с пазом 11. На этой же стойке шарнирно установлена направляющая 12, в которой с возможностью поступательного перемещения размещен стержень 13 механической руки манипулятора. Второй опорой этого стержня служит жестко закрепленный в нем палец 14, на котором установлены два подшипника 15 и 16. Подпшпник 15 расположен в криволинейном пазу 17, выполненном в стойке корпуса, а подшипьшк 16 - в пазу 11 рычага 10. Конец стержня 13 шарнирно с помощью оси 18 связан с захватным органом, состояш,им из поворотной пластины 19 и закрепленных на ней загнутых стальных прутьев 20 и щек 21. На конце стержня 13 закреплена втулка 22 с подшипниками скольжения. На втулке 22 размещена возвратная пружина 23 кручения для удержания захватного органа в приподнятом крайнем положении. На этой же втулке имеется кронштейн, на котором закреплены датчики 24 и 25 с возможностью взаимодействия своими чувствительными элементами с поворотной пластиной 19 в крайних положениях захватного органа.
)
На стойке корпуса 3 также закреплены два датчика 26 и 27, чувствительные элементы которых взаимодейст52
вуют с рычагом 10 в его крайних положениях ,
Манипулятор работает следующим образом.
В исходном положении (фиг,) зах- ват1шй орган манипулятора расположен в зоне трассы вертикального конвейера, в люльках которого размещены комютекты обуви. Если люлька пуста,
ее прутья проходят сквозь прутья 20 захватного органа и манипулятор не включается.
При подходе к манипулятору груженой люльки установленная на ней
обувь смещает захватный орган на угол d- (фиг.1). Пластина 19, поворачиваясь вокруг оси 18, воздействует на датчик 25, и включается двигатель 4, вращение вала которого приводит к повороту рычага 10 и перемещению пальца 14 с подшипником-15 в пазу стойки. При достижении рычагом 10 крайнего положения он воздействует на датчик 27, и двигатель 4 останавливается. Стержень 13 за это время успевает наклониться на угол ij- , а наклон захватного органа становится равным углу (f . При этом каблуки обуви в момент остановки захватного органа оказываются на уровне опорной поверхности люлек горизонтального конвейера, на которые обувь соскальзывает под действием собственного веса. Освобожденная от веса обуви
платформа под действием пружины 23 поворачивается вокруг оси 18, поворотная пластина 19 нажимает на датчик 24, и двигатель 4 включается на реверс, что приводит к возврату захватного органа манипулятора в исходное положение. При достижении рычагом 10 крайнего положения он воздействует на датчик 26, и двигатель останавливается .
Формула изобретения
1. Манипулятор, содержащий опорный вал, корпус, смонтированный на
нем с возможностью поворота, механическую руку с захватным органом, механизмы его подъема и выдвижения, смонтированные в корпусе, и привод, связанный с червячной передачей, о тличающийся тем, что, с целью повьш1ения надежности за счет упрощения механизмов перемещения захватного органа, механическая рука выполнена в виде стержня, в средней
. 3131
части которого закреплен палец с двумя опорами качения, на стенке корпуса шарнирно установлена дополнительная направляющая и выполнен криволинейный паз, а механизм подъема .захватного органа посредством дополнительного рычага, имеющего продоль- зый паз, и червячной передачи кинематически связан с приводом, причем стержень механической руки размещен в дополнительной направляющей, одна из его опор качения расположена в
52954
криволинейном пазу корпуса, а ДРУ гая - в пазу поворотного рычага.
2. Манипулятор по п. 1, о т л. и - чающийся тем, что он снабжен
с двумя датчиками положения, расположенными на корпусе с возможностью взаимодействия с поворотным рычагом, и двумя датчиками положения, расположенными на механической руке с возfO можностью взаимодействия с захватным органом, причем последний подпружинен относительно механической руки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1972 |
|
SU441141A1 |
| Установка для автоматической штамповки | 1980 |
|
SU867671A1 |
| Устройство для изготовления резиновой обуви | 1986 |
|
SU1360998A1 |
| Многоцелевой станок с ЧПУ | 1985 |
|
SU1351739A1 |
| Автоматизированный участок механической обработки изделий с центральным отверстием | 1983 |
|
SU1073077A1 |
| МАНИПУЛЯТОР АВТОСЦЕПКИ | 2010 |
|
RU2434734C1 |
| Устройство для отделения верхней заготовки от стопы и подачи ее в ориентированном положении | 1987 |
|
SU1454550A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Устройство для захвата и подачи в зону обработки объемного изделия | 1982 |
|
SU1094606A1 |
| Манипулятор | 1984 |
|
SU1333567A1 |
Изобретение относится к области машиностроения, в частности к манипуляторам для автоматизации производственных процессов, и может быть использовано для перегрузки обуви с конвейера на конвейер. Целью изобретения является пойышение надежности за счет упрощения механизма перемещения захватного органа. Манипулятор содержит смонтированный на опорном стержне 1 корпус 3 с механической рукой с захватным органом и привод. При загрузке захватного органа обувью по команде от датчика 25 включается двигатель 4 и через червячную передачу 6, 9 и рычаг 10 начинается отвод захватного органа от вертикального конвейера и далее опускание его с одновременным поворотом вместе с корпусом 3 вокруг стержня 1. В крайнем положении каблуки обуви касаются несущего органа горизонтального кон- Befiepa и соскальзывают на него. Да- лее по команде от датчика 24 двигатель 4 включается на реверс и возвращает захватный орган в исходное положение. 1 з.п. ф-лы, 5 ил. С & (Л 7 /иК I , , 7 J { 1 5 2 t 6-J( 3 26 с«А Фиг. со 3 26 Фиг.1
Фиг.2
Фиг.З
В-в
ФигЛ
Составитель С.Новик Редактор И.Николайчук Техред Н.Глущенко
Заказ 2258/17 Тираж 953Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Г-Г
(риг. 5
Корректор Г.Решетник
| Манипулятор | 1981 |
|
SU963847A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
