113
Изобретение относится к робототехнике, в частности к устройствам для нодачи в штамп и удахкшия из него штучных листовых заготовок,Целью изобретения является повышение производительности комплекса за счет возможности игтамповки листов различной толщины без его переналадки.
На чертеже схематически изображен предлагаемый комплекс, общий вид.
Роботизированный комплекс листовой штамповки содержит манипулятор с рукой 1, установленной на направляющих (не показаны) с возможностью перемеи1;ения перпендикулярно поверхности подъемного стола 2, снабженного приводом 3 его дозированного перемещения. На направляющих установлен концевой выключатель 4 с возможностью взаимодействия с рукой 1, несу-i щей исполнительный орган, например электромагнит 5, Позицией 6 обозначена стопа заготовок.
Роботизированный комплекс работае следующим образом.
Роботизированный комплекс может . осуществлять загрузку заготовок в щтамп пресса, или выгрузку и стапели рование деталей на подъемном столе. При работе на загрузку рука 1 мани- пулятора, опускаясь на стопу 6, захватывает электромагнитом 5 верхнюю заготовку и уносит ее в щтамп пресса. По мере работы манипулятора высота стопы 6 уменьшается, а вертикальный ход руки i увеличивается. При достижении определенной величины хода руки срабатывает кондевой выключатель 4, включающий привод 3 подъемного стола 2, стол поднимается на предварительно заданную фиксироСоставитель Ф Майоров Редактор Э.Слиган Техред Н.Глущенко Корректор В.Бутяга
Заказ 2386/12 Тираж 953Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-ЗЗ, Раушская наб,, д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
681
O
5
0
5
ванную величину, восстанавливая положение верхнег о листа заготовки.
В случае работы на выгрузку отштампованных деталей рука 1 манипулятора забирает деталь из пресса, опускается на стопу 6 заготовок, отключается питание электромагнита 5, и рука уходит, составляя деталь на стопе. При каждом опускании руки на стопу происходит срабатывание концевого выключателя 4, дающего сигнал о нахождении высоть стопы в допусти- мьп пределах. По мере работы манипулятора высота стопы увеличивается, а вертикальный ход руки 1 уменьшается. При достижении определенной высоты стопы 6 рука 1 манипулятора при укладке очередной детали на стопу не включает концевой выключатель 4. В этом случае включается привод подъемного стола 2, и стол опускается на предварительно заданную, фиксированную величину.
Формула изобретения
Роботизированный комплекс для листовой щтамповки, содержащий подъ- емный стол с приводом ег;о дозированного перемещения, имеющим цепь управления, манипулятор, рука которого установлена с возможностью перемещения перпендикулярно поверхности стола,, отличающийся тем, что, с целью повьщ1ения производительности путем обеспечения возможности щтамповки листов различной толщины без переналадки комплекса, он снабжен концевым выключателем, имеющим возможность взаимодействия с рукой манипулятора и включенным в цепь управления приводом стола.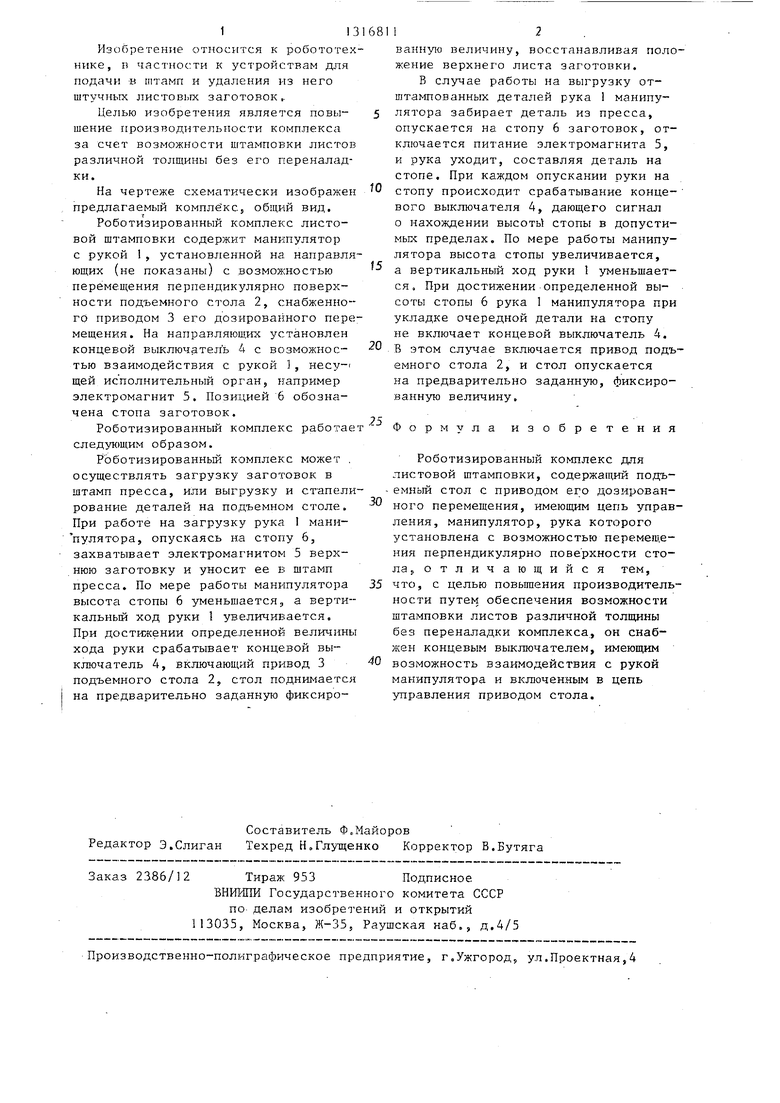
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Автоматизированная линия для листовой штамповки | 1985 |
|
SU1319981A1 |
| Автоматический комплекс для штамповки деталей из полосы | 1983 |
|
SU1177012A1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
| Линия штамповки деталей из листового материала | 1985 |
|
SU1278082A1 |
| Автоматизированный комплекс для многопереходной штамповки | 1986 |
|
SU1349851A1 |
| Устройство для подачи листового материала в рабочую зону пресса | 1979 |
|
SU824534A1 |
| Автоматическая линия безоблойной штамповки | 1980 |
|
SU889482A1 |
| Линия для многопереходной штамповки деталей из листового материала | 1987 |
|
SU1433587A1 |
Изобретение относится к области робототехники, в частности к устройствам для подачи в штамп и удаления из него штучных листовых заготовок. Целью изобретения является повьшение производительности роботизированного комплекса за счет возможности штамповки листов различной толщины без его переналадки. В случае работы на загрузку рука в манипуляторе, опускаясь на стопу 6, захватывает электромагнитом 5 верхнюю заготовку и уно- сит ее в штамп пресса. По мере работы манипулятора высота стопы 6 уменьшается/ а вертикальный ход руки 1 увеличивается. При достижении определенной величины хода руки срабатывает концевой выключатель 4, включающий привод 3 дозированного перемещения стола 2. Стол поднимается на предварительно заданную фиксированную величину, восстанавливая положение верхнего листа заготовки. В случае работы на выгрузку рука 1 при захвате заготовки взаимодействует с концевым выключателем 4, а привод 3 стола 2 включается , если нет взаимодействия руки 1 с выключателем 4, т.е. когда высота стопы превьшает заданную. 1 ил. с 9 (Л со а 00
| Робот к листоштамповочному прессу | 1977 |
|
SU677906A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
