I1
Изобретение относится к машиностроению, а именно к робототехнике.
Цель изобретения -- упрощение конструкции и расширение технологических возможностей охвата за счет обес печения возможности регулировки направления и усилия досылки заготовок.
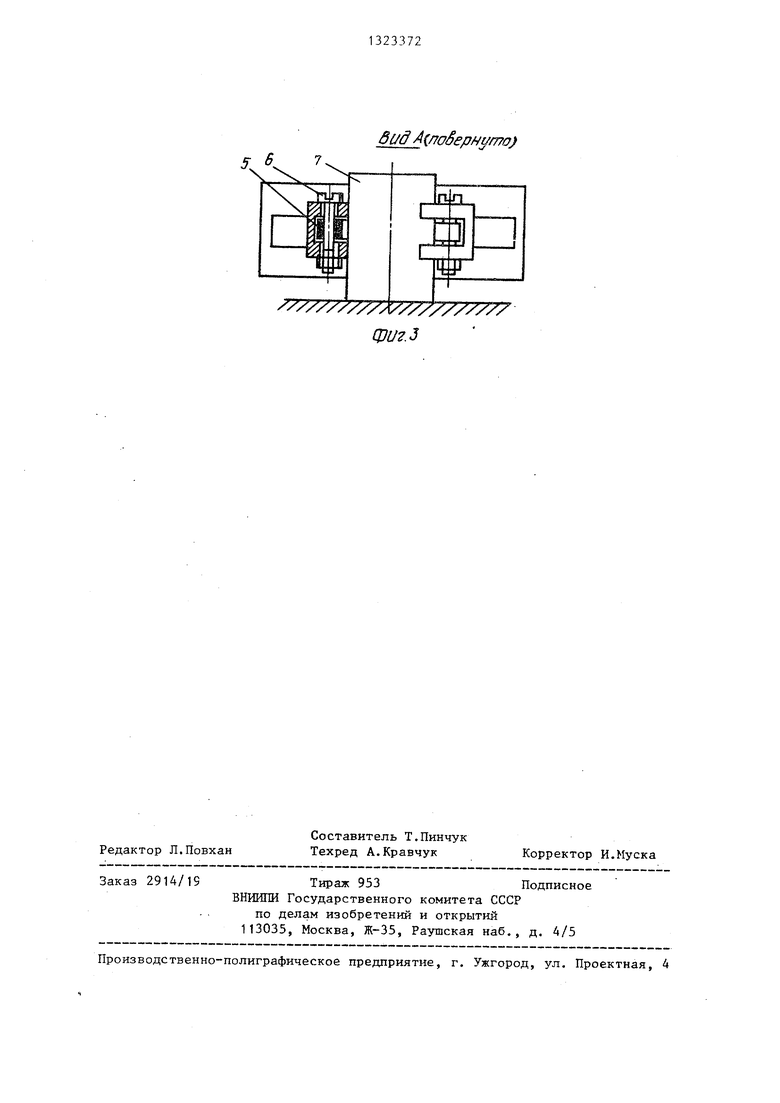
На .фиг. 1 изображен схват с зажа-- той деталью; на фиг. 2 - то же, с разделенными подвижными рычагами в момент досьшки заготовки; на фиг. 3- вид А на фиг. 1.
Схват содержит корпус 1, подви:к- ные рычаги 2 с захватными губками 3, в которых выполнены 4. Между захватными губками 3 установлена гибкая лента, концы которой посредством осей 6 закрепляются в пазах 4 с возможностью регулировочного ri -ipe- мещения вдоль паза 4 и фиксацией в таком положении.
Предлагаемый схват работает следующим образом.
Схват подводится к заготовке с разведенными подвижными рычагами 2, несущими захватные губки 3, до упора в нее гибкой ленты 5. При сведении пЬдвижных рычагов 2 с захватными губ3372
к а ми
10
15
20
25
3 одновременно происходит прогиб гибкой ленты 5. Зажатая заготовка 7 нереноситсл и устанавливается в положение, из которого требуется досылка, например при плотной укладке в в тару. При разведении подвижных рычагов 2 с захватными губками 3 г ибкая лента 5 выпрямляется, придавая заготовке 7 определенные направление и усилие перемещения, которь е могут регулироваться за счет возможности различного фиксированного за- крешшния концов гибкой ленты 5 осями 6 в пазах 4.
Формула изсбретения
Схват, содержащий корпус, подвижные рычаги с захватными губками и досьшатель заготовок, отличаю- щ и и с я тем,; что, с целью упрощения конструкции и расширения техноло- гкгческих возможностей, досьшатель заготовок выполнен в виде гибкой ленты, концы которой связаны с осями, а в захватных губках выполнены пазы, в которых расположены упомянутые оси с возможностью их регулировочного перемещения и фиксации.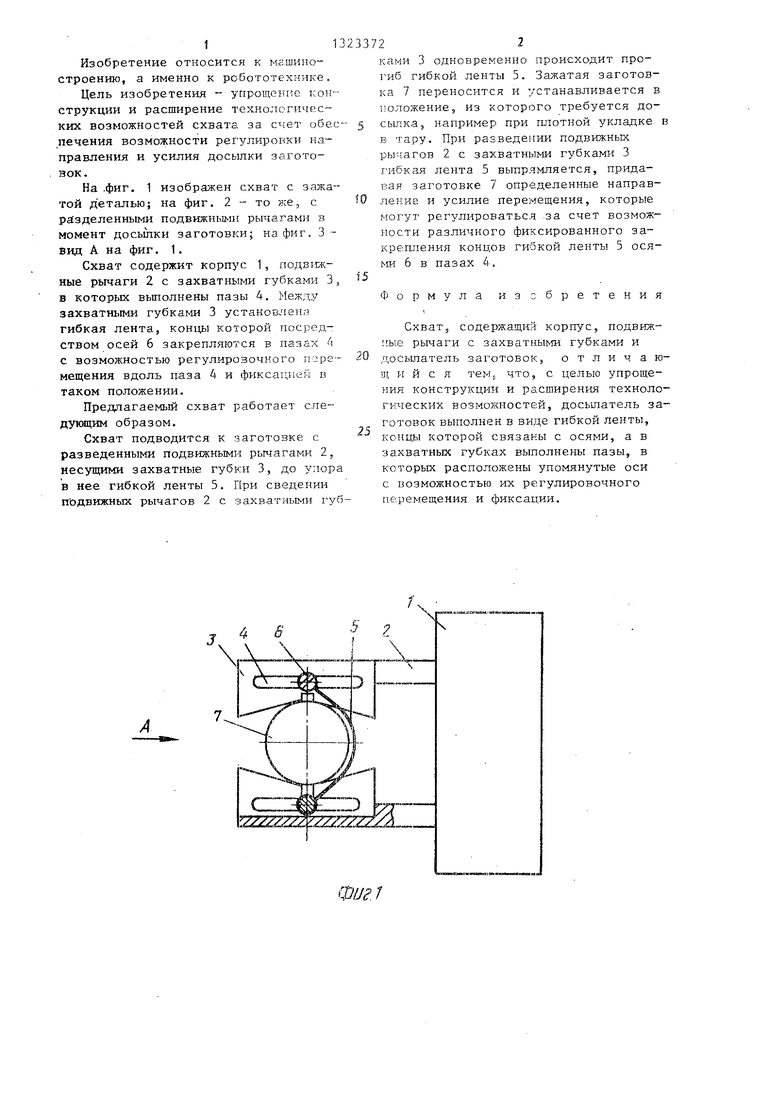
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1984 |
|
SU1184663A1 |
| Схват | 1986 |
|
SU1335450A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Автоматизированная линия для штамповки деталей из листового материала | 1987 |
|
SU1505639A1 |
| Устройство для подачи и удаления изделий из рабочей зоны пресса | 1990 |
|
SU1787058A3 |
| Схват | 1985 |
|
SU1289679A1 |
| Устройство для поштучной выдачи заготовок | 1986 |
|
SU1324728A1 |
| Захватное устройство | 1986 |
|
SU1342724A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Устройство для подачи листового материала в зону обработки | 1987 |
|
SU1442301A1 |
Изобретение относится к машиностроению, а именно к робототехнике. Цель - упрощение конструкции и расширение технологических -возможностей за счет обеспечения возможности регулировки направления и усилия досылки заготовок. Заготовка 7 устанавливается в положение, из которого требуется досылк а, например при плотной укладке в тару. Подвижные рычаги 2, несущие захватные губки 3, разводятся, гибкая лента 5 выпрямляется, придавая заготовке 7 определенные направление и усилие перемещения, которые могут регу.гшроваться за счет возможности различного фиксированного закрепления концов гибкой ленты 5 осями 6 в пазах 4. 3 ил. /
Фиг.1
бс/д А{/7о6ернул7о}
УУ77777
Редактор Л.Повхан
Составитель Т.Пинчук Техред А.Кравчук
Заказ 2914/19
Тираж 953Подписное
ВНИЖШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
ФигЗ
Корректор И.Муска
| Захватное устройство | 1976 |
|
SU558777A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
