Ичобрьчч ние отн(к-ится к мапппк нию.
lac i HocTH к чахватнпм
У;- гронстнам манипуляторов,
Цель изо1)ретеиия - расширение функциональных возможногте захват- ni.iro устройг.тва за счет обеспечения 1 с;зможности поворота заготовки, зажатой в охвате, относительно ег о оси ()ез дополнительного привода.
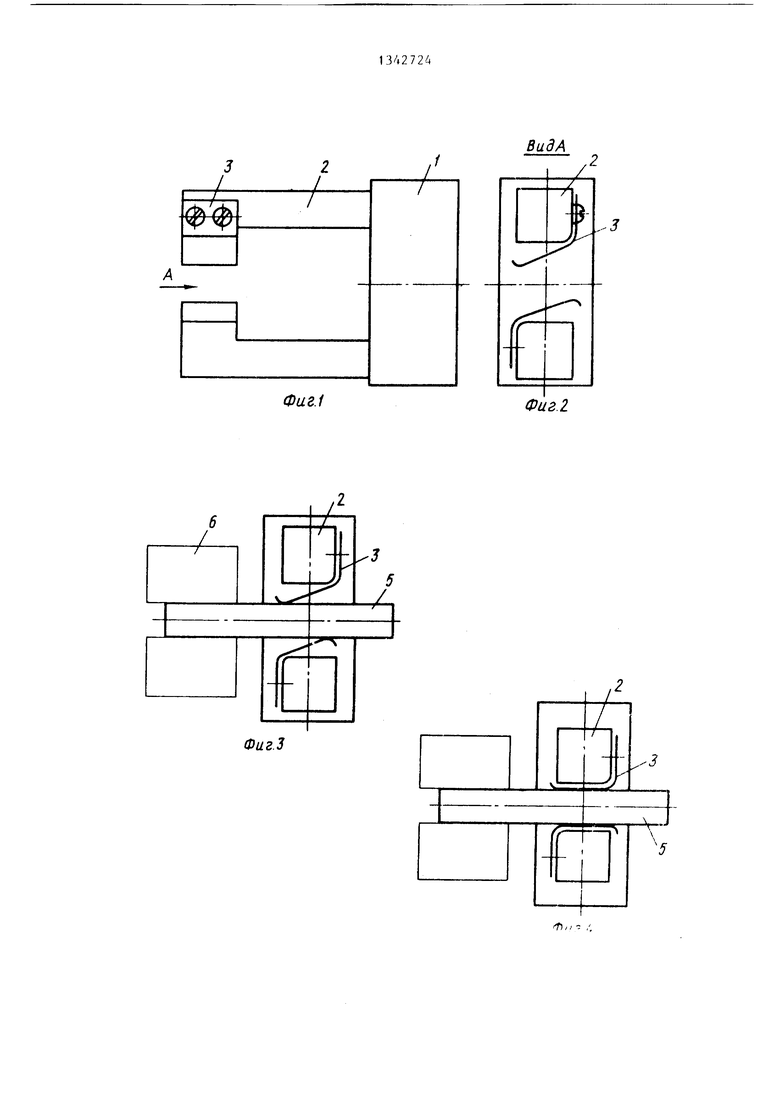
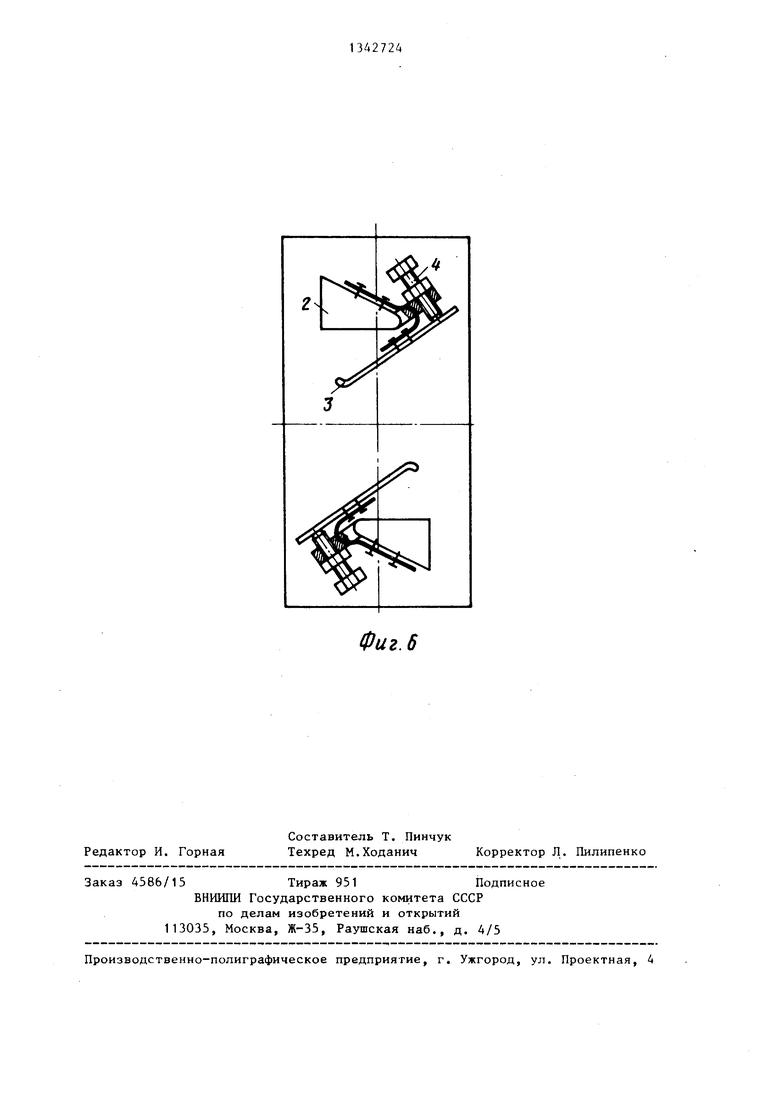
На фиг. 1 представлено захватное устройство, общш вид; на фиг. 2 - иид А на фиг. 1; на фиг. 3 - подвод захватного устроГютва к заготовке, зажатой в тисках; на фиг. 4 - зажим заготовки; на фиг. 5 - поворот заготовки, зажатой в захватном устройстве; на фиг. 6 - выполнение регулировки угла наклона губок к плоскости с имметрии схвата.
Захватное устройство состоит из корпуса 1 f приводом,пальцами 2, ус- тановленн1)1ми в корпусе 1 с возмож- HocTbft линейного перемещения. На пальцах 2 закреплены одним концом гуОки 3, Н1 1полнснн1,1е в виде пластин- чат|11х пружин. Их рабочие концы размещены го с тороны рабочих участков пальцев 2 и смонтированы под углом к плоскости симметрии схвата, причем п.чоскости губок 3 выполнены параллельными одна друг ой, а закрепление (зв - осесимметричнь;м.
Ут ол наклона губок 3 относительно плоскости симметрии схвата, а соответственно и угол поворота заготовки зажатой в схвате, относительно его оси могут быть выполнены регулируе- М1)1ми, например, за счет установки регу;1ировочных винтов-упоров 4, взаимодействующих с губками 3,
Захватное устройство работает следующим образом.
Заготовка
расположенная, например, в тисках 6 (фиг. 3), захватывается пальцами 2.Ось захватного уст- рой -тва располагается параллельно оси заг(1Топки. При этом происходит прогиб губок 3, в.1П1х;иснных в виде
5
S
0
6
0
В
пластинчатых пружин, до положения, 11арал 11 лы1ого оси заг отовки.
При разведении пальцев 2 на величину, fie большую величину подъема свободного конца пластинчатых пружин, под действием упругих сил заготовка поворачивается, будучи зажатой относительно оси захватного устройства.
Угол поворота определяется величиной разведения пальцев 2 и фиксируется упором 4. Кроме регулировки конечного Ш ложения заготовки в процессе режима, упор 4 благодаря тому, что пластинчатые пружины в конце своего подъема остаются в напряженном состоянии, обеспечивает достаточное усилие для осуществления поворота заготовки до трег-уемого конечного положения. Освобождение заготовки происходит при дальнейшем разведении губок.
Предлагаемое захватное устройство несложно в изготовлении, технологические возможности его расширены, поскольку поворот заготовки осуществляется без использования дополнительного привода.
Формула изобретения
1.Захватное устройство, содержащее корпус, привод, пальцы с закрепленными на них одним концом губками, отличающееся тем, что, с целью расширения функциональных возможностей, губки выполнены в виде пластинчатых пружин, расположенные осесимметрично, причем их рабочие концы размещенв, со стороны рабочих участков пальцев и смонтированы под углом к плоскости симметрии схвата.
2.Устройство по п. 1, отличающееся тем, что каждый палец снабжен регулировочным винтом-упором, взаимодействующим с губкой и определяющим угол ее наклона
к плоскости симметрии схвата.
Фиг.1
Фиг
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1983 |
|
SU1119842A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Схват промышленного робота | 1983 |
|
SU1177150A2 |
| Гибкий производственный модуль | 1987 |
|
SU1541017A1 |
| Схват | 1985 |
|
SU1289679A1 |
| Схват | 1986 |
|
SU1335450A1 |
| Устройство для подачи детали в зону контроля после шлифования | 1990 |
|
SU1763142A1 |
| Схват | 1986 |
|
SU1390021A1 |
| Схват | 1984 |
|
SU1180267A1 |
| Самоцентрирующие тиски | 1991 |
|
SU1796436A1 |
Изобретение относится к области машиностроения, в частности к захватным устройствам манипуляторов. Цель - расширение функциональных возможностей за счет обеспечения поворота заготовки, зажатой в захватном устройстве, относительно его оси без дополнительного привода. Это достигается зажимом пальцами 2 заготовки 5, фиксированной, например, тисками. Ось захватного устройства располагается параллельно оси заготовки 5. При этом происходит прогиб губок 3, выполненных в виде пластинчатых пружин, до положения, параллельного оси заготовки 5. При разведении пальцев 2 на величину, не большую величины подъема свободного конца пластинчатых пружин, под действием упругих сил заготовка 5 поворачивается, будучи зажатой относительно оси захватного устройства. Угол поворота может быть выполнен регулируемым. 1 з.п. ф-лы, 6 ил. i (Л Фиг 5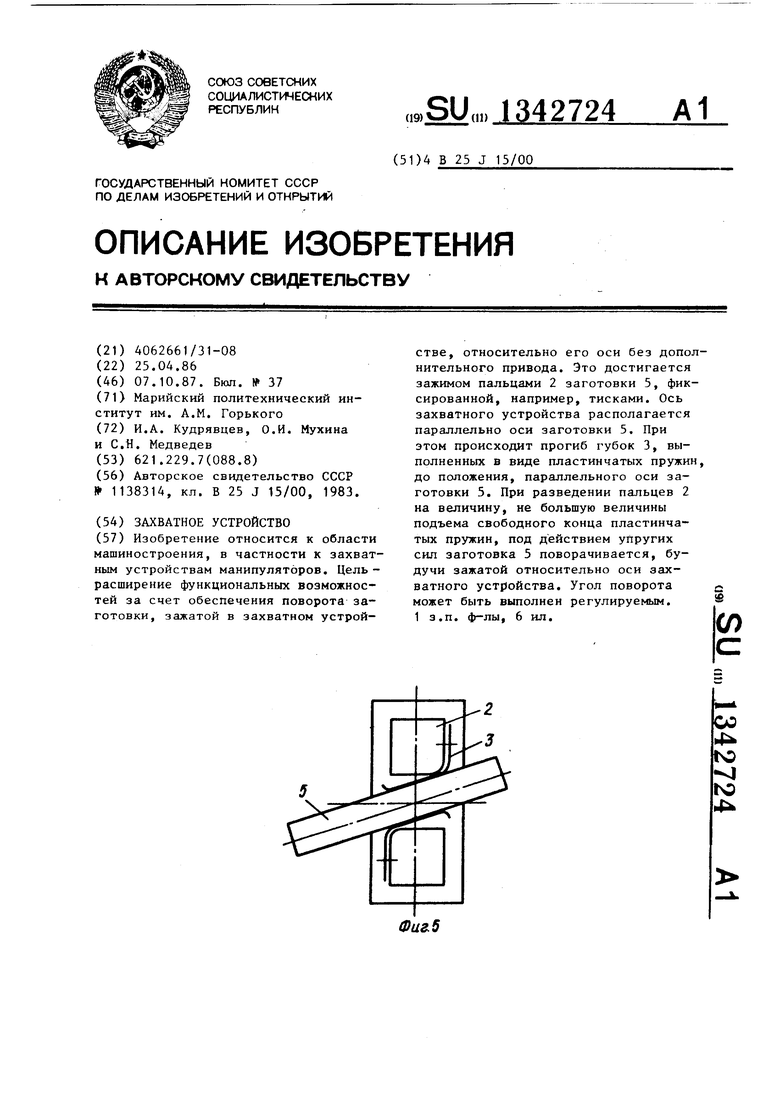
Фаг.З
-3
Редактор И. Горная
Составитель Т. Пинчук Техред М.Ходанич
Заказ 4586/15Тираж 951Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г Ужгород, ул. Проектная, 4
Фиг. 6
Корректор Л. Пилипенко
| Схват | 1983 |
|
SU1138314A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
