Изобретение относится к сельскохозяйственному машиностроению, в частности к механизмам привода подающего транспортера кормораздатчика.
Целью изобретения является упрощение конструкции и повышение надежности в работе.
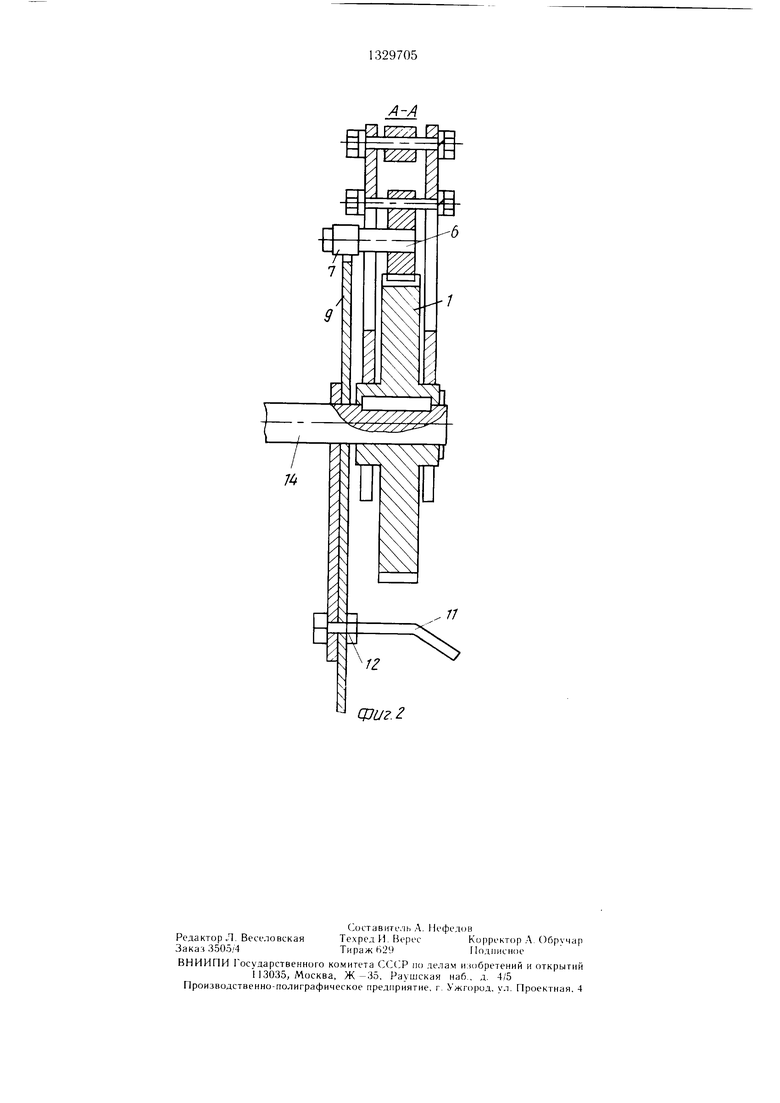
На фиг. 1 схематично изображен механизм привода подающего транспортера, общий вид; на фиг. 2 - разрез А-А на фиг. I.
Л Уеханизм привода включает храповое колесо 1, взаимодействующее с ведущей собачкой 2, шарнирно соединенной с кулисой 3, которая связана с щатуном 4 криво10
чатого регулирования скорости транспортера. При установке пластины 9 в крайнее левое положение она не воздействует на собачку 2. В этом случае последняя работает с храповым колесом 1 на полную длину дуги, определяемую размерами кривошипа 5 и шатуна 4. В результате за каждый оборот кривошипа 5 подающий транспортер получает максимальное перемешение, обеспечивая максимальную производительность кормораздатчика. При перемещении пластины 9 вправо она воздействует на ролик 7, приподнимая его, а через палец 6 также и собачку 2, не позволяя ей войти в зацепление с храповым колесом 1 на полную длину ее
типа 5. Ведущая собачка 2 снабжена жест- 15рабочего хода. В результате производителько прикрепленным к ней пальцем 6 с роли-ность кормораздатчика уменьшается. Во
ком 7 и установлена щарнирно на оси корпу-избежание больших динамических нагрузок
са механизма. Ролик 7 контактирует с ра-на lapy храповое колесо - собачка выходбочей кромкой 8 пластины 9 для ограниче-ной участок 10 рабочей кромки 8 пластины 9
20
ния длины активной части хода ведущей собачки. Пластина размещена параллельно торцу храпового колеса. Рабочая кромка 8 расположена концентрично храповому колесу и выполнена с выходным участком 10, размешенным под углом 30-60° к ее касательной. Фиксация пластины в нужном положении при ее повороте вокруг оси храпового колеса 1 осуществляется резьбовой рукояткой 1 1 и гайкой 12 в направляющей 13, расположенной по дуге окружности. Храповое колесо закреплено на ведущем валу 14 подающего транспортера кормораздатчика.
Механизм привода работает следующим образом.
Движение через кривощип 5, щатун 4,
выполнен наклонным под углом 30-60°, что обеспечивает также надежное зацепление собачки с храповым колесом.
25
30
Формула изобретения
1. Механизм привода подающего транспортера, включающий храповое колесо, взаимодействующее с ведущей собачкой, снабженной пластиной для ограничения длины активной части ее хода, размещенной параллельно торцу храпового колеса, контактирующей своей рабочей кромкой с роликом, закрепленным на пальце ведущей собачки, и имеющей приссюсобление для поворота вокруг оси храпового колеса, отличающийся тем, что, с целью упрощения конкулису 3, собачку 2, храповое колесо 1 35 струкции и повышения надежности в рабо- передается на ведущий вал 14 подающеготе, рабочая кромка пластины размещена
транспортера. Изменение длины активной части рабочего хода собачки 2 путем вывода ее из зацепления с храповым колесом 1 осуществляется пластиной 9, которая воздействует на собачку через ролик 7 и палец 6. Направляющая 13, резьбовая рукоятка 11 и гайка 12 обеспечивают фиксацию пластины 9 в любом положении для бесступен40
концентрично храповому колесу и выполнена с выходным участком, расположенным под углом 30-60° к ее касательной.
2. Механизм по п. 1, отличающийся тем, что приспособление для поворота пластины вокруг оси храпового колеса выполнено с направляющей, расположенной по дуге окружности.
чатого регулирования скорости транспортера. При установке пластины 9 в крайнее левое положение она не воздействует на собачку 2. В этом случае последняя работает с храповым колесом 1 на полную длину дуги, определяемую размерами кривошипа 5 и шатуна 4. В результате за каждый оборот кривошипа 5 подающий транспортер получает максимальное перемешение, обеспечивая максимальную производительность кормораздатчика. При перемещении пластины 9 вправо она воздействует на ролик 7, приподнимая его, а через палец 6 также и собачку 2, не позволяя ей войти в зацепление с храповым колесом 1 на полную длину ее
рабочего хода. В результате производительвыполнен наклонным под углом 30-60°, что обеспечивает также надежное зацепление собачки с храповым колесом.
Формула изобретения
1. Механизм привода подающего транспортера, включающий храповое колесо, взаимодействующее с ведущей собачкой, снабженной пластиной для ограничения длины активной части ее хода, размещенной параллельно торцу храпового колеса, контактирующей своей рабочей кромкой с роликом, закрепленным на пальце ведущей собачки, и имеющей приссюсобление для поворота вокруг оси храпового колеса, отличающийся тем, что, с целью упрощения кон
концентрично храповому колесу и выполнена с выходным участком, расположенным под углом 30-60° к ее касательной.
2. Механизм по п. 1, отличающийся тем, что приспособление для поворота пластины вокруг оси храпового колеса выполнено с направляющей, расположенной по дуге окружности.
CPU г. г
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для насекания надфилей | 1979 |
|
SU772760A1 |
| Механизм привода реверсивного транспортера кормораздатчика | 1987 |
|
SU1493204A1 |
| Механизм привода реверсивного транспортера машины для распределения сыпучего материала | 1989 |
|
SU1648270A1 |
| Устройство для привода продольного транспортера кормораздатчика | 1988 |
|
SU1576083A1 |
| МЕХАНИЗМ ПРИВОДА РЕВЕРСИВНЫХ ТРАНСПОРТЕРОВ, | 1968 |
|
SU209910A1 |
| Механизм привода транспортера кормораздатчика | 1989 |
|
SU1644844A1 |
| Устройство для привода продольных транспортеров кормораздатчиков | 1986 |
|
SU1327857A1 |
| Устройство для перегрузки яиц из ячеечной тары на транспортер | 1972 |
|
SU490739A1 |
| Устройство для упаковывания цилиндрических изделий | 1984 |
|
SU1303496A1 |
| Устройство для погрузки на полочные вагонетки камерных сушил пустотелых керамических блоков | 1951 |
|
SU95524A1 |
И; обретение относится к се, 1ьско 0- яйственному ман1иностроению. Ц(.Ч1) изобретения - упрощение конструкции и повышение надежности в работе. Механизм чает см(;нтированное на ведущем валу транс- нортера храновое колесо , движени - которому передается от кривонпша 5 мере. uia- гун 4, кулису 3 и собачку 2. Изменение длины активной части рабочего хода собачки путем вывода ее из зацепления с храповым колесом осуп1ествляется поворотной ктас- типой 9. Последняя своей рабочей кро.мкой 8 воздействует на собачку через ролик 7 и па. кш ti. Выходной участок 10 рабочей кромки нластины выполнен наклонным под уг.юм 30 -60° к ее касательной. 1 з.п. ф-лы, 2 ил. (О (Л со N3 СО О ел Фиг.1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механизм привода реверсивногоТРАНСпОРТЕРА КОРМОРАздАТчиКА | 1979 |
|
SU793519A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
