Толкатель 5, размещенный на платформе 2, при помощи цепной передачи и привода 7 перемещается вправо до упора 15, закрепленного на платформе 2, переталкивая деталь на приемный стол накопителя станочного модуля. При этом привод 7, продолжая работать и выбирая цепь цепной передачи 6, заставляет звездочку 13 перемещаться влево. Рычаг, закрепленный на звездочке 13, взаимодействуя с конечным выИзобретение относится к машиностроению и может быть использовано для перегрузки спутников станочных модулей в гибких производственных системах.
Цель изобретения - повышение надежности работы устройства за счет исключения инерции исполнительных элементов при их перемещении.
На фиг. 1 изображено устройство,
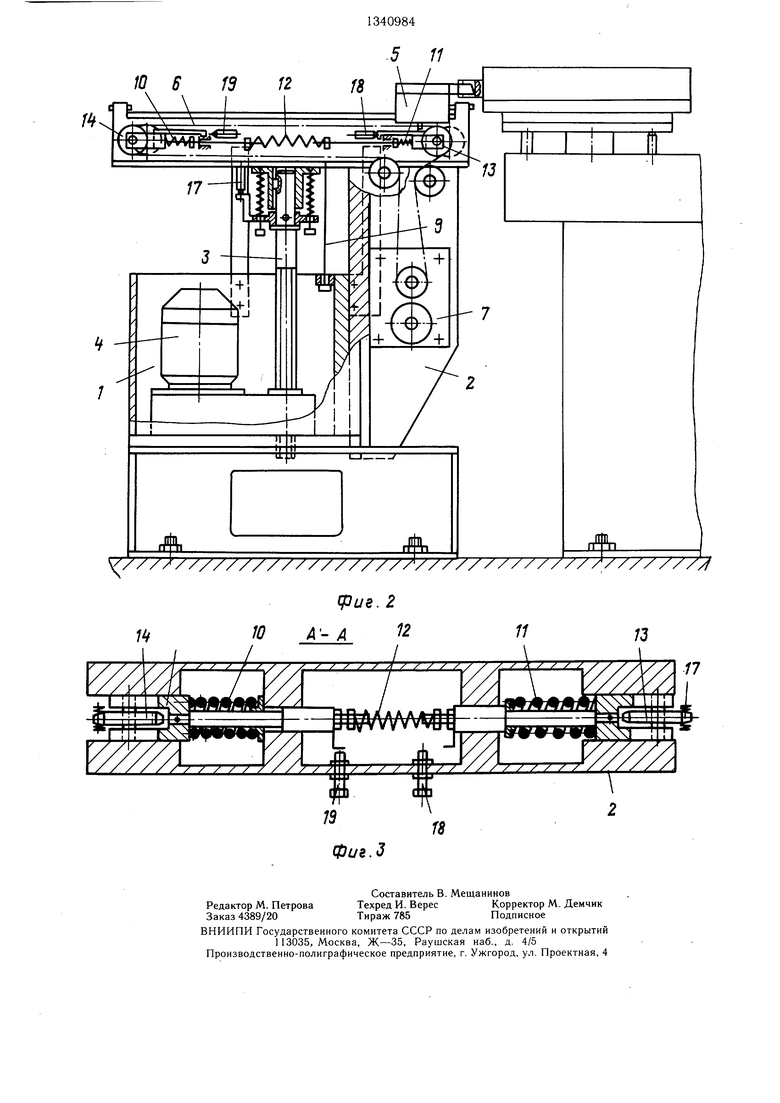
общий вид; на фиг. 2 - то же, в., ,,,
момент подачи детали на приемный стол ключателем 18, отключает привод 7, а упру- накопителя; на фиг. 3 - разрез А-А нагое компенсационное звено в виде пруфиг. 1 (компенсационное звено цепной пере- жин 10, II и 12 перемещает вторую звез- дачи толкателя).дочку 14 также влево, выбирая расчетУстройство для подачи деталей содер-ную величину провиса цепи (фиг. 2).
жит основание 1, платформу 2, установлен- Происходит точное базирование толкателя 5 ную на ходовом винте 3 привода 4 ееи гашение возникающих при его перемеподъема, и толкатель 5, размещенный нащении инерционных сил. Далее платформа
Платформе 2 и связанный цепной переда-2 опускается, а толкатель 5, возвращаясь
чей 6 с приводом 7 его перемещения.в исходное левое положение (фиг. 1),
доходит до упора 16 и останавливается.
Платформа 2 выполнена подпружинен- 20 Звездочка 14 цепной передачи 6 своим ры- ной относительно ходового винта 3 пружи-чагом, взаимодействуя с конечным выключателем 19, останавливает привод 7 толкаНами 8 и установлена на нем с возможностью возвратно-поступательного перемещения, причем на ней закреплен упор 9, ограничивающий верхнее ее положение относительно основания 1.
Толкатель 5 снабжен компенсационным упругим звеном в виде пружин 10, 11 и 12, связывающих звездочки 13 и 14 его цеп- иой передачи. Сами звездочки 13 и 14 устателя 5.
25
Формула изобретения
Устройство для подачи деталей, содержащее основание, платформу, связанную с ходовым винтом привода ее подъема, толкатель, установленный с возможностью возновлены на платформе 2 с возможностью ,Q вратно-поступательного перемещения пос
возвратно-поступательного перемещения.
На платформе 2 установлены упоры 15 и 16 конечных положений толкателя 5. Система управления работой исполнительных элементов выполнена на конечных выключателях 17, 18 и 19.
Устройство работает следующим образом.
Деталь типа спутника станочных модулей перемещается на опоры основания 1. Включением привода 4 ходовой винт 3 поднимает платформу 2 до верхнего конечредством цепной передачи, связывающей его с приводом, и систему управления приводами в виде конечных выключателей, отличающееся тем, что, с целью повышения надежности работы за счет исклю- ., чения инерции исполнительных элементов.
платформа подпружинена относительно ходового винта привода подъема и установлена с возможностью возвратно-поступательного перемещения относительно него, а толкатель размещен на платформе и снабжен ного положения, ограниченного упором 9, 40 компенсационным упругим звеном, связы- упирающимся в основание 1. В моментвающим между собой звездочки цепной
останова платформы 2 привод 4, продолжая работать, перемещает ходовой винт 3 вверх относительно неподвижной платформы 2 и, сжимая пружины 8, преодолевает их усилие и замедляет ход. При этом рычаг, закрепленный на винте 3, взаимодействуя с конечным выключателем 17 системы управления, останавливает привод 4 (фиг. 2).
передачи, при этом звездочки установлены на платформе с возможностью возвратно- поступательного перемещения и связаны с конечными выключателями системы управле- 45 ния привода, а основание и платформа снабжены упорами для ограничения соответственно конечных положений платформы и толкателя.
Толкатель 5, размещенный на платформе 2, при помощи цепной передачи и привода 7 перемещается вправо до упора 15, закрепленного на платформе 2, переталкивая деталь на приемный стол накопителя станочного модуля. При этом привод 7, продолжая работать и выбирая цепь цепной передачи 6, заставляет звездочку 13 перемещаться влево. Рычаг, закрепленный на звездочке 13, взаимодействуя с конечным вы., ,,,
ключателем 18, отключает привод 7, а упру- гое компенсационное звено в виде прутеля 5.
25
Формула изобретения
Устройство для подачи деталей, содержащее основание, платформу, связанную с ходовым винтом привода ее подъема, толкатель, установленный с возможностью возвратно-поступательного перемещения пос
редством цепной передачи, связывающей его с приводом, и систему управления приводами в виде конечных выключателей, отличающееся тем, что, с целью повышения надежности работы за счет исклю- чения инерции исполнительных элементов.
платформа подпружинена относительно ходового винта привода подъема и установлена с возможностью возвратно-поступательного перемещения относительно него, а толкатель размещен на платформе и снабжен компенсационным упругим звеном, связы- вающим между собой звездочки цепной
передачи, при этом звездочки установлены на платформе с возможностью возвратно- поступательного перемещения и связаны с конечными выключателями системы управле- 45 ния привода, а основание и платформа снабжены упорами для ограничения соответственно конечных положений платформы и толкателя.
Ю 6
Фиг.З
Составитель В. Мещанинов
Редактор М. ПетроваТехред И. ВересКорректор М. Демчик
Заказ 4389/20Тираж 785Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
1 13035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4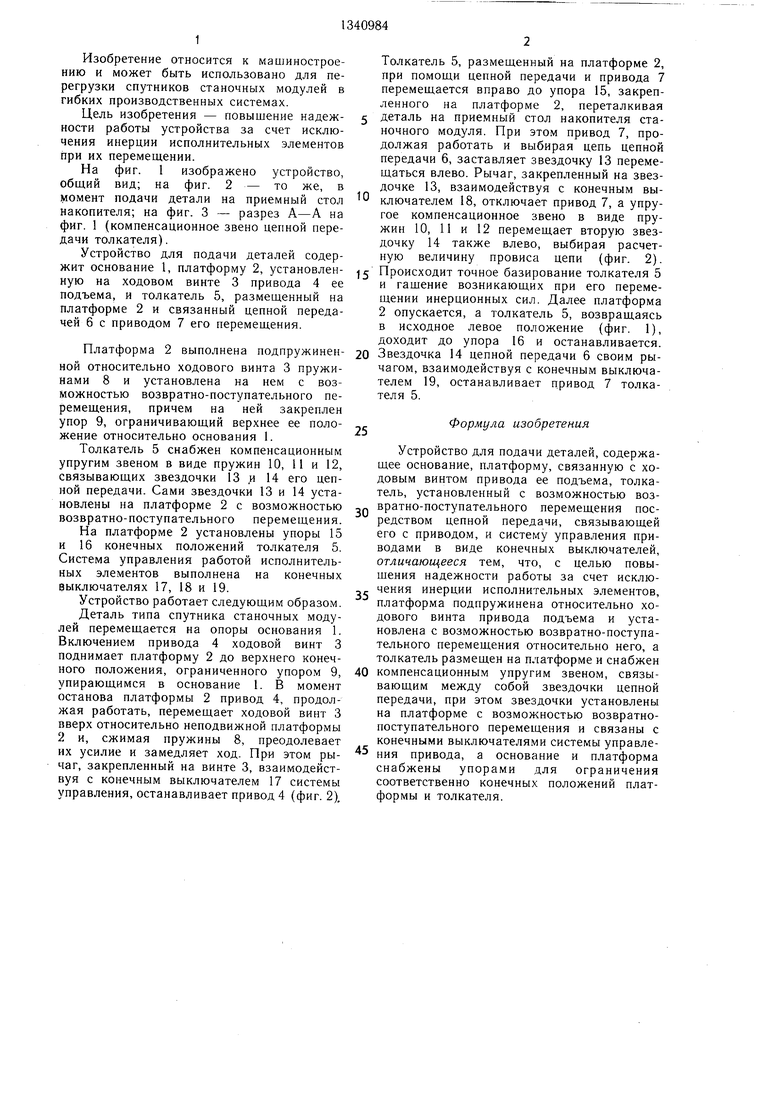
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки паковок | 1990 |
|
SU1710475A1 |
| Передаточная тележка | 1990 |
|
SU1787882A1 |
| Устройство для перегрузки изделий | 1980 |
|
SU948817A1 |
| Привод шаговых перемещений | 1990 |
|
SU1778048A1 |
| Механизм перегрузки паковок | 1991 |
|
SU1779234A3 |
| Автоматизированная сборочная линия | 1983 |
|
SU1174229A1 |
| Автомат для маркирования деталей краской | 1981 |
|
SU1061879A1 |
| Устройство для подачи многослойного настила к вырубочному прессу | 1981 |
|
SU1066925A1 |
| Машина для чесания меховых шкур | 1975 |
|
SU558940A1 |
| Телескопический грузозахват | 1986 |
|
SU1384482A1 |
изобретение относится к машиностроению и может быть использовано для перегрузки спутников станочных модулей в гибких производственных системах. Целью изобретения является повышение надежности работы за счет исключения инерции исполнительных элементов устройства. Для этого платформа 2, установленная на ходово.м винте 3 привода 4 ее подъема, при перемещении в строго заданное верхнее конечЮ 6 12 18 ное положение вначале останавливается упором 9, а затем выключается привод 4- ее перемеш,ения. При этом ходовой винт 3 некоторое время перемеодается относительно неподвижной платформы 2, сжимая пружины 8 и гася инерцию, а только потом концевой выключатель 17 отключает привод 4 его перемещения. Деталь, размещенная на опорах основания 1, при помощи толкателя 5, связанного с приводом 7 цепной передачей 6, перемещается вправо на приемный стол накопителя. При этом толкатель 5, дойдя до жесткого упора 15, останавливается, а привод 7, продолжая работать и выбирая цепь, заставляет звездочку 13 переместиться влево и выключить при помощи концевого выключателя 18 привод 7 его перемещения. Звездочка 14 после останова привода 7, перемещаясь влево под действием пружин 10-12 компенсационного звена, выбирает расчетную величину провиса цепи. Это звено гасит инерцию исполнительных элементов его привода 7. 3 ил. (О (Л 16 Ю5 оо 4 о со 00 N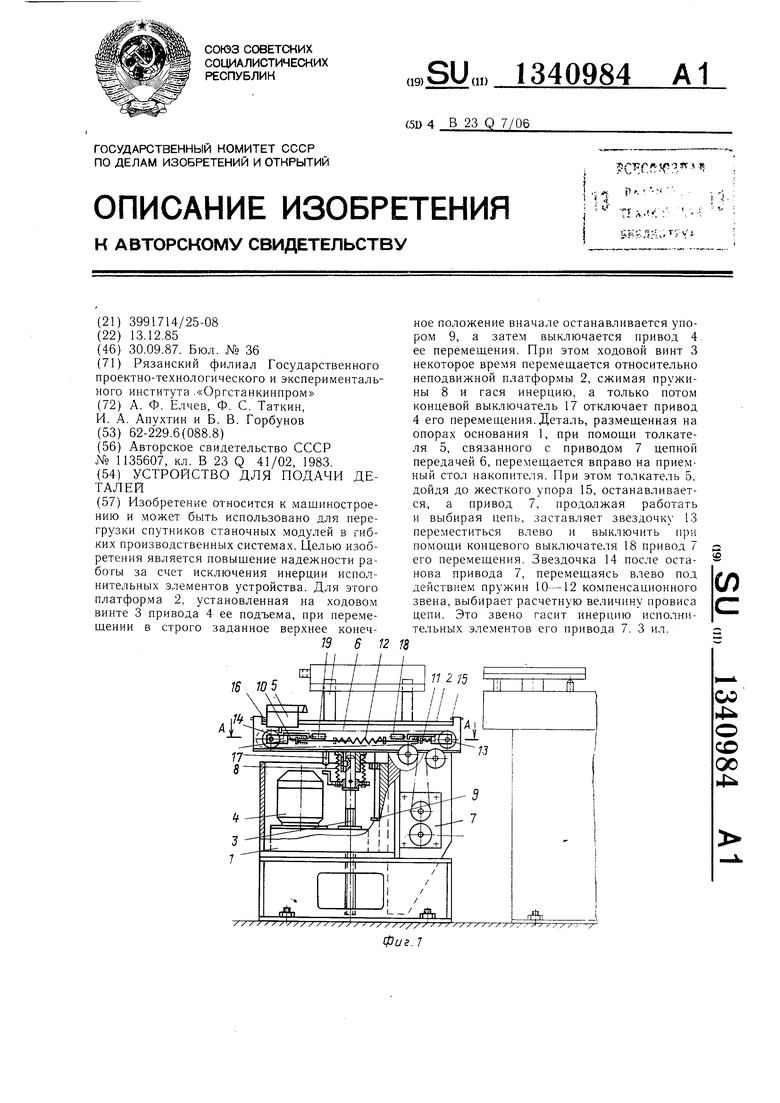
| Автоматическая линия для механической обработки цилиндрических деталей | 1983 |
|
SU1135607A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
