Изобретение относится к электротехнике и может быть использовано в электроприводах различного назначения для регулирования угла поворота вала асинхронного электродвигателя.
Целью изобретения является минимизация потерь энергии в электродвигателе в процессе позиционирования.
На чертеже показана структурная схема частотно-управляемого асинхронного электропривода
Электропривод содержит асинхронный электродвигатель 1, статорные обмот- ки которого подключены к выходам статического преобразователя 2 частоты, вычислительный блок 3, соединенный выходами через блоки управления частотой 4 и напряжением 5 с управля- ющими входами статического преобразователя 2 частоты, датчик 6 частоты вращения, датчик 7 статического момента, подключенные входами к асинхронному электродвигателю 1, датчик 8 ускорения, вход которого соединен с вторым выходом датчика 6 частоты вращения, программные переключатели задания угла поворота 9 и уровня по35
терь 10,первый, второй, третий, чет- зо щепринятые обозначения в декарто- вертый и пятый входы вычислительного блока 3 соединены соответственно с первым выходом датчика 6 частоты вращения и выходами программного переключателя 9 задания угла поворота, .программного переключателя 10 задания уровня потерь, датчика 8 ускорения и датчика 7 статического момента.
Для асинхронного электропривода,- динамика которого описывается полной системой дифференциальных уравнений в полярных координатах
40
вой системе координат: и, ы - напряжение и частота п тания статора; р , р - модули потокосцепления
статора и ротора; Л If - угол между потокосцепл
ниями статора и ротора lU - момент сопротивления,
может зависеть от V прерывно и монотонно; О - частота вращения ротор I - момент инерции привода a,b,c,h, - константы;
р и cos - - d PJ + с р ,
и . .
-с - S in у + С - S in л L/ + (jJ ,
в р о pg
р hpg cos dgi - bf,, ,
., H.i,(c-t
sinuif- pV,
I 3 - s( .
Pe P,-
на основе асимптотической магистральной теории аналитически определен оптимальный позиционный процесс, Обобщенный критерий качества взят :В виде
т I - {Л,р + Д - Aj л) ) dt - min
i(2)
где , AI 9 ъ неотрицательные
весовые множители.
Критерий (2) учитывает быстродействие, потери и производительность и получен как взвешенная сумма критериев
Т т
J о
X dt
т
J
Q dt
0
min
(, Ipx
1 dt
.Jdt
min;
max.
(3) (4)
(5)
0
В (1) все величины выражены через параметры схемы замещения и об
щепринятые обозначения в декарто-
вой системе координат: и, ы - напряжение и частота питания статора; р , р - модули потокосцепления
статора и ротора; Л If - угол между потокосцеплениями статора и ротора; lU - момент сопротивления,
может зависеть от V непрерывно и монотонно; О - частота вращения ротора; I - момент инерции привода; a,b,c,h, - константы;
т
- Lf arctg
.
в - угол поворота ротора; угол поворота вектор косцепления статора;
L/ - угол поворота вектора пото
Vg..- проекция вектора потокосцепления статора на ось А ; Vf: проекция вектора потокоСцепленция статора на ось с( ; B(3)i и ij - квадраты токов в роторе и статоре; и Rj и R., - сопротивление статора и ротора.
3
Учитываем ограничения ление
О .и .. и„„,, ,
(с
и фазовые координаты 0 р, . р
5 WOKC
О f, Р
Г макс
-1- d.i. Rj:L(i -.), fi / (kl
pp sin (2lvT/(46L)5.
де L ---i-Ljr-l-b-..
L , L , индуктивности статора, poTQpa, взаимная:
p - число пар полюсов.
Значение } м делено из формулы
Значение } может быть опре ) +Д2
где а
I( Rr)
2 (L)
6
Зр
При разгоне имеем
(Pst ) (; arccos Х,),(9)
РПР X - I-i- -l-I -e + с/ , где X, - -.,
-,
2- Лз-0
При торможении
.Д,
на участке I (%|„ у V 7/ -О ---)
5. . (f,v) (1; 0,5 arccos Х2),(10)
U -ps f b Cos 4()2- -(c - sin 2 4 + btg J(+ p )
Таким образом, получены аналитиче-угла поворота 9 поступают в вычисли- ские выражения для оптимального втельный блок 3, где по заранее постсмысле критерия (2) управления асин-роенным таблицам определяется Д, и хронным электроприводом. gg Да (параметр Д полагается равЭлектропривод работает следующимным 1). Далее вычислительный блок 3
образом.рассчитьшает значение Vn по формуСигналы с программных переключа-ле (8) и г ъ каждом
телей задания уровня потерь 10 итакте управления выполняет (до тех
363536
Решение задачи минимизации функционала (2) при условиях (1) находят по выражению ( Vt
argmin ( Р. , i V ) для разгона, 5 AAV -IS
имеющего место до достижения )
значения )п (при этом / : и . ) и по выражению (fg , V ) argnax F( р , dv) торможения Р (при Ътом lUj : (Uj ), где . ,
на участке II ,
(|),4(/t) (1; -0,5 arccos Xj),(11)
где Xj
1 1 Jl l.l 1. . (T +,)+ Л Г
Управления U и w, удерживающие систему (1) в точках ( р , 25 UL( ) при разгоне и(р , ) при торможении, определяются как
U)
мин
« l -МИН J
w V
ш,
1.
1 1
i 1 -мин
I м«КС I 1 W ,
и,, и, и„„,, ,
(12)
и
(13)
где
макс
, и, 7
UMOKC т
ш btg Vp + -7- (
- С
45
-ь - )
(14)
X sin |Ug) ,
(15)
51
пор, пока асинхронный двигатель 1 не отработает заданный программным переключателем 9 угол поворота ротора
6j ) следующую процедуру: рассчитывается jt/ f , U , со, . Теперь значения U и ,w с выхода вычислительного блока 3 поступают на входы блоков управления напряжением 4 и частотой 5,. которые через статический преобразователь 2. частоты управляют асинхронным двигателем 1. Информация о состоянии двигате Ья (.значение скорости, ускорения, статического момента) через датчики частоты вращения 6, статического момента 7 и ускорения 8 поступает на входы вычислительного блока 3, который переходи к следующему такту управления.
Алгоритм работы вычислительного блока 3 позволяет существенно снизить количество арифметических операций и отказаться от вычисления прямых и обратных тригонометрических функций.
При его выполнении приняты следующие обозначения и допущения. Для всего процесса -р 1, что позволяет этот сомножитель исключить из выражений (14) и (15).
ДЬ
k
1 - при разгоне на участке I торможения,
-1 - на участке II торможения.
Ингредиент (|д р| sin 2u(f
из.формулы (15) представляет собой преобразованную правую часть уравнения } (ju - 5 )/1, т.е. ускорение.
В (14) и (15) имеются члены Cos dq- , sin 2 , tg iif , где
-aw - магистральные значения ((9) - реализуются в вычислительном блоке 3. (11)). На основании известных три- гонометрических соотношений
Знак - в формулах соответствует второму участку торможения, где 0.
Учитьшая указанные выводы запи- шем вьфажения для U и w , которые
,y(fb.-b--).p,
t 1 - ,
2 - 52.ir 2jL 5I 2E2BllCos 4tf
55
Алгоритм, реализованный в вычисли тельном блоке 3, выглядит в общем виде так:
вычисление и задание постоянных
коэффициентов;
k, -1 признак разгона), k,2 :
1 + Cos (t arccos x-,2 ) . 2 разгон (x X,), пока -J Vn i
2
-(. ill I SS - - - i ) tg c - I 2 (fo.sTrc coTs Xi,J
x« tJ/1 .
X
1,1
1 + X
1,2
sin 2dL/ t 1 - (t 0,5
arccos X
f,2
) iVT
i
Введем обозначения
X при разгоне.
х
25
X, при торможении.
Ь fT- x+i
где
k
1 - при разгоне на участке I торможения,
-1 - на участке II торможения.
реализуются в вычислительном блоке 3.
Знак - в формулах соответствует второму участку торможения, где 0.
Учитьшая указанные выводы запи- шем вьфажения для U и w , которые
реализуются в вычислительном блоке
45
,y(fb.-b--).p,
.
1 + X . 10
50
где A a - - (1 + x ) .
Алгоритм, реализованный в вычислительном блоке 3, выглядит в общем виде так:
вычисление и задание постоянных
коэффициентов;
ц : 1 (признак торможения);
торможение (первый участок), л ка V / )к ;
kj (знак - перед у) - признак участка II торможения;
торможение, пока V О ;
останов;
Выражение для х упрощается следующим образом.
Пусть
z 1 + (У ; z г, + 1 . Тогда
л .1
(oiV + 2 о, +
+ 1) -ь в - 1 (z )
- 1 Zj - 1,
откуда
X
..
В табличной записи алгоритма используются следующие соотнощения:
46L Зр 261 L
f.J-
k;; «. # V - 1 - V J OU X - I т X ,
2b
л) л)р; .B - ; A a - kj. X
b
x
U min (U, U,o,x );
U)mir |niax(u.,u))j,
где d, g, kj - константы; x,, B,ZjfZjg- промежуточные результаты.
435368
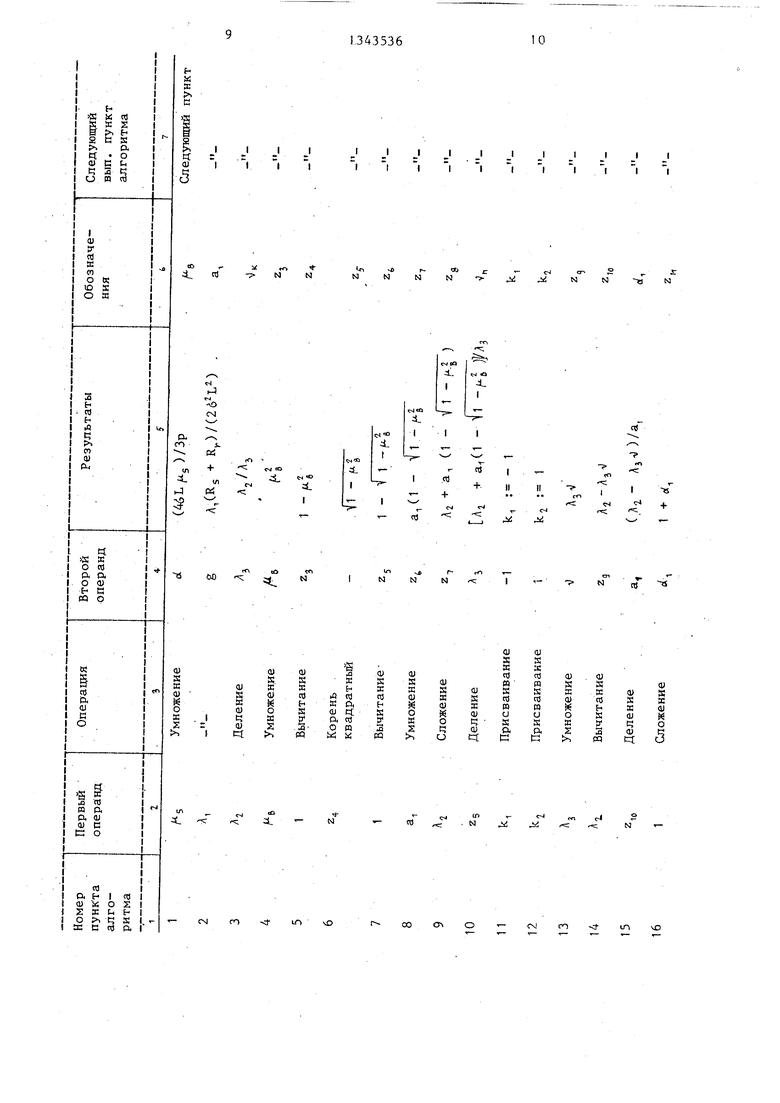
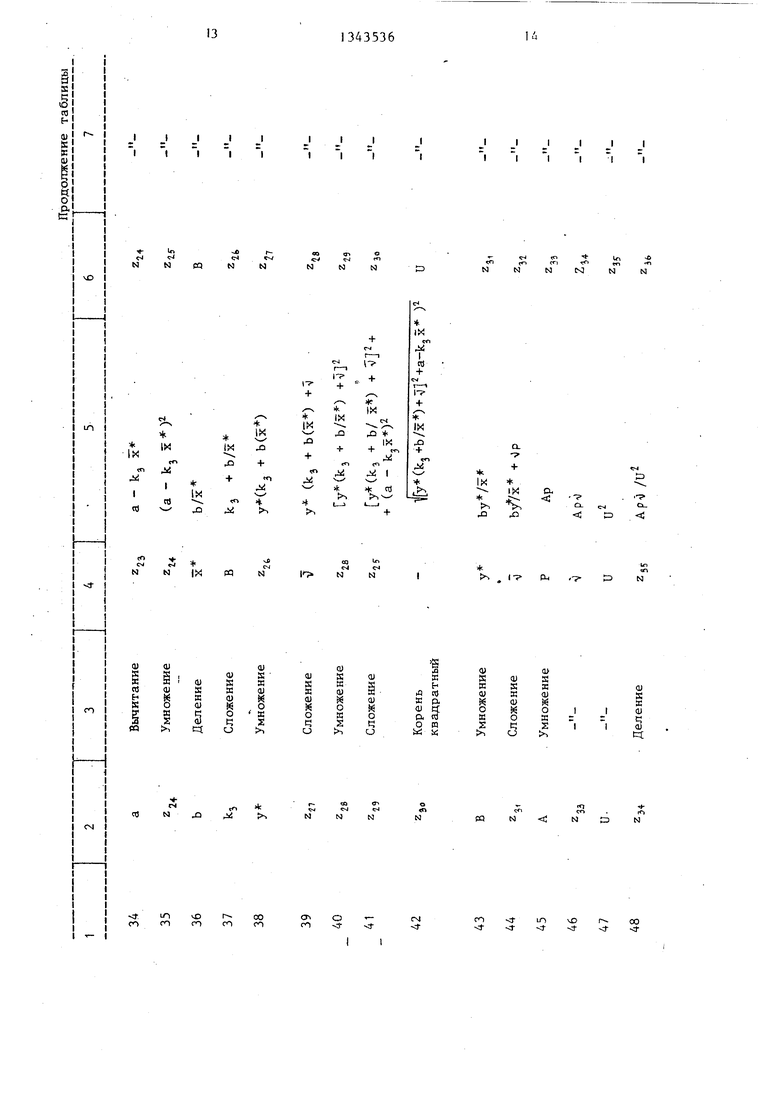
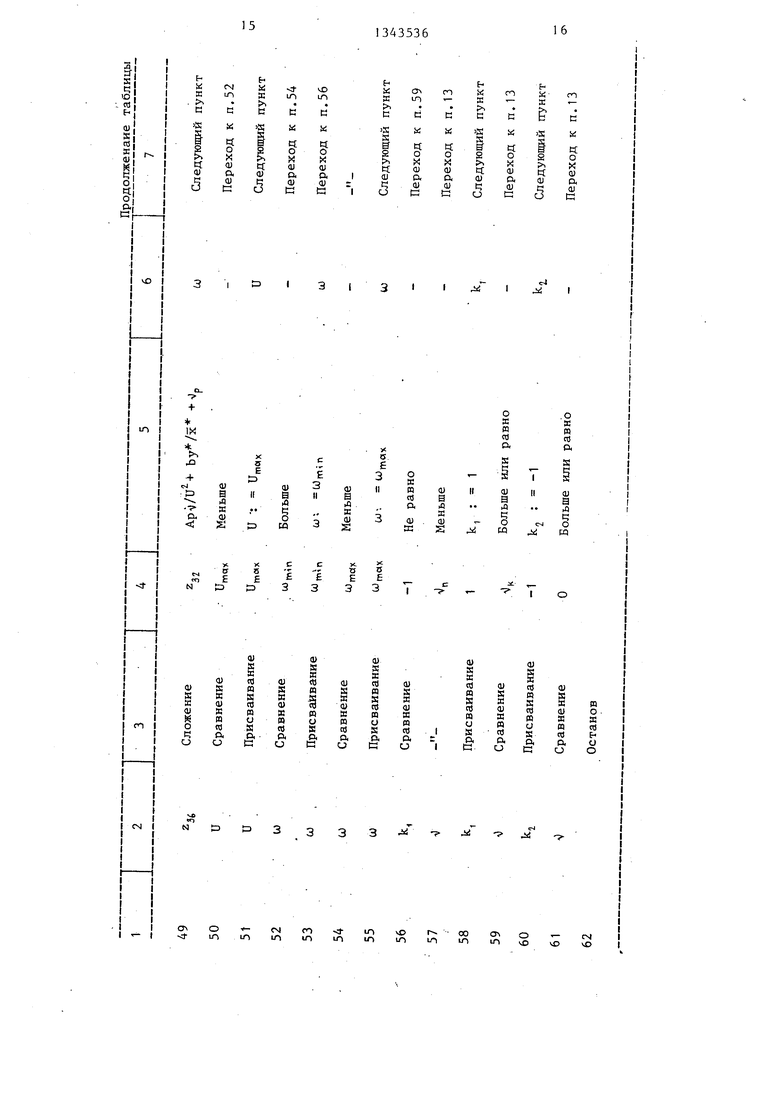
Таблица описывает алгоритм работы вычислительного блока 3 как последовательность вычислительных операций.
Таким образом, применение в структуре электропривода программных переключателей задания уровня потерь 10 и угла поворота 9 датчиков момента 7 и ускорения 8 и использование 1Q указанного алгоритма работы вычислительного блока 3 позволяет электроприводу за минимальное время срабатывать заданный угол поворота 0j при заданном уровне потерь энергии
IS QSФормула изобретения
Частотно-управляемый асинхронный
2Q электропривод, содержащий асинхронный электродвигатель, статорные обмотки которого подключены к выходам статического преобразователя частоты, вычислительньш блок, соединенный
25 выходами через блоки управления напряжением и частотой с управляющими входами статического преобразователя частоты, датчик частоты вращения ротора асинхронного электро3Q двигателя, первый выход которого подключен к первому входу вычислительного блока, отличающи й- с я тем, что, с целью минимизации потерь энергии в электродвигателе в процессе позиционирования, введены программные переключатели задания угла поворота и уровня потерь, датчик статического момента, датчик ускорения, второй, третий, четвертый
Q и пятый входы вычислительного блока соединены с выходами соответственно программного переключателя задания угла поворота, программного переключателя задания уровня по.терь, датчика ускорения и датчика статического момента, а вычислительный блок функционирует в соответствии с алгорит- мом, представленным в таблице.35
45
Ox
о
CMCS
СЧ
cs
CM
m
чО CM
f CM
CO CM
04 CM
о
m
CN
M
ГО- ГО
ы
N
Ш S
к
О
к
Oi
ro
о
t3
м
+
IX
rO
cx f
PLI
I
ж
ЕlO ей X p,
01cr
ara
оn
ии
m
rf
N
ГО f
r r
Ю
}4D
Г-- )OO
-




| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-управляемый электропривод | 1985 |
|
SU1332504A1 |
| Способ торможения асинхронного электродвигателя | 1983 |
|
SU1136286A1 |
| Частотно-регулируемый электропривод | 1985 |
|
SU1288887A1 |
| Электропривод переменного тока | 1984 |
|
SU1515322A1 |
| Электропривод | 1985 |
|
SU1309244A1 |
| Устройство для управления асинхронным электроприводом лифта | 1979 |
|
SU773883A1 |
| Устройство для управления асинхронным электродвигателем | 1979 |
|
SU864479A1 |
| Частотно-регулируемый электропривод | 1979 |
|
SU866681A1 |
| Частотно-управляемый тяговый электропривод | 1982 |
|
SU1072231A1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором и устройство для его осуществления | 1987 |
|
SU1515323A1 |
Изобретение относится к области электротехники и может быть исf f 7 пользовано в электроприводах различного назначения для регулирования угла поворота вала асинхронного электродвигателя. Целью изобретения является минимизация потерь энергии в электродвигателе в процессе позиционирования. Применение в структуре электропривода программных переключателей задания уровня потерь 10 и угла поворота 9, датчиков момента 7 и ускорения 8 наряду с датчиком 6 частоты вращения при использовании вычислительного блока 3, реализующего заданный вычислительный алгоритм, позволяет электроприводу за минимальное время обрабатывать заданный угол поворота 6j при заданном уровне потерь энергии Qj.1 ил. 1 табл. I (Л
| Частотно-управляемый электропривод | 1974 |
|
SU587589A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для регулирования асинхронного двигателя | 1975 |
|
SU629618A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
