Изобретение относится к оборудованию складов, в частности к. конструкциям устройств управления перегрузочными органами стеллажного крана-штабелера.
Цель изобретения - упрощение конструкции и надежности.
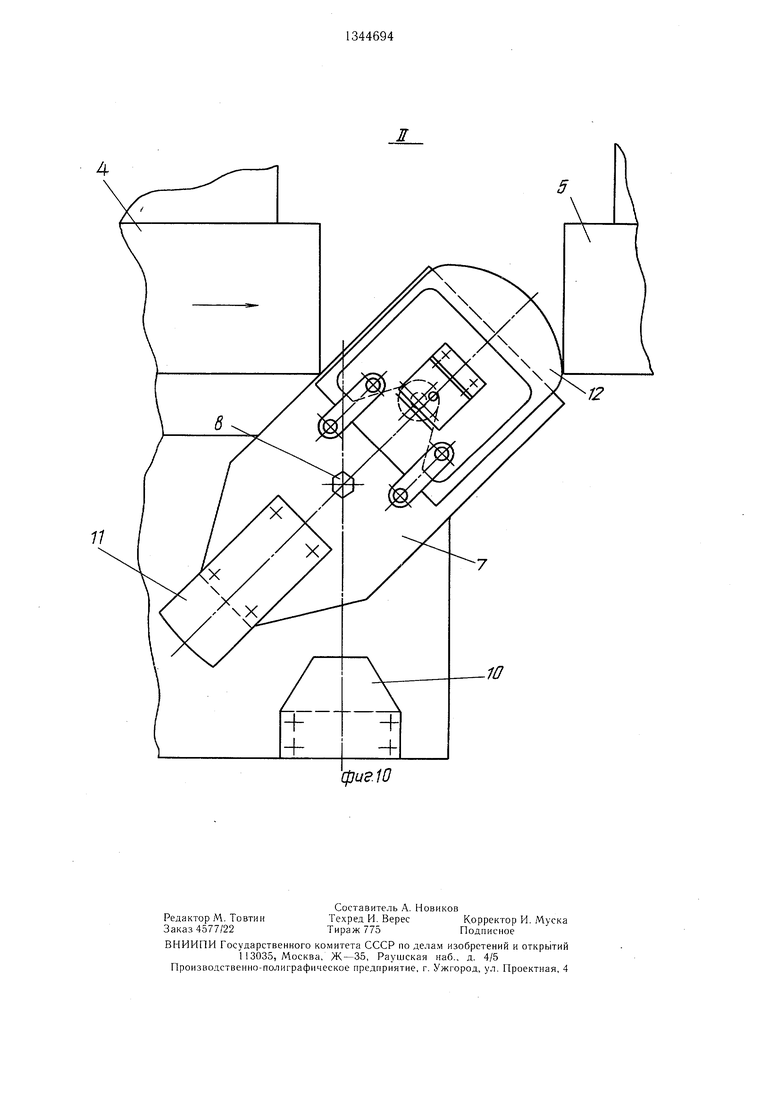
На фиг. 1 изображена грузоподъемная площадка с устройствами для управления приводом перегрузочного органа; на фиг. 2 - то же, при загрузке груза в ячейку стеллажа, когда ячейка стеллажа занята; на фиг. 3 - то же, при загрузке груза в ячейку стеллажа, когда ячейка свободна; на фиг. 4 - то же, после загрузки груза в ячейку; на фиг. 5 - то же, при выгрузке груза из ячейки стеллажа, когда на площадке находится груз; на фиг. 6 - то же, при выгрузке груза из ячейки, когда на площадке груза нет; на фиг. 7 - то же, после выгрузки груза из ячейки стеллажа; на фиг. 8 - узел I на фиг. 1 на фиг. 9 - сечение А-А на фиг. 8; на фиг. 10 - узел II на фиг. 2.
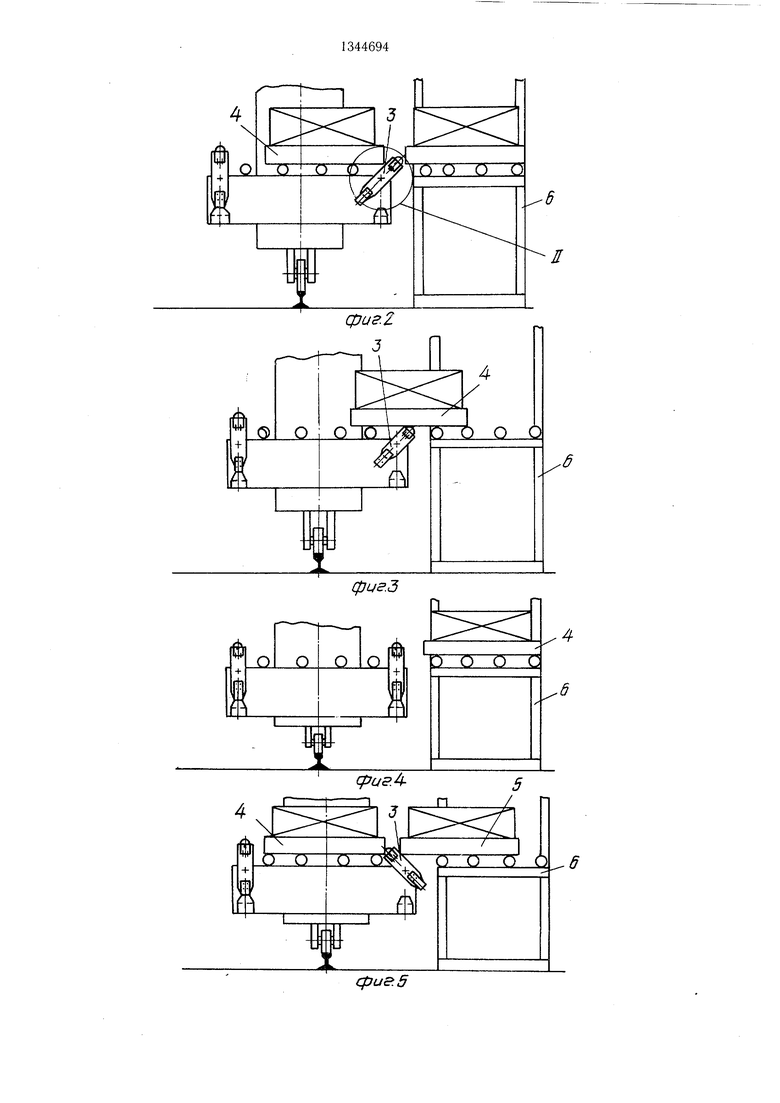
Устройство смонтировано на грузоподъем- ной площадке стеллажного крана-щтабелера которая содержит основание 1 с роликовым конвейером 2 и привод загрузки-выгрузки (не показан). На обоих торцах основания 1 площадки установлены упомянутые устройства 3 для управления приводом. Каждое из этих устройств 3 размещено с возможностью взаимодействия с грузами 4 и 5, находящимися на грузоподъемной площадке и на стеллажах 6 в исходном положении (фиг. 1). Каждое из упомянутых устройств 3 выполнено в виде поворотного двуплечего рычага 7, самоустанавливающегося по вертикали за счет, например, расположения его центра тяжести ниже оси 8, при помощи которой рычаг 7 присоединен к раме 1 грузоподъемной площадки. Рычаг 7 может также самоустанавливаться по вертикали за счет его подпружинивания в вертикальном направлении или при помощи магнита, расположенного у нижнего конца рычага 7. Рычаг 7 несет на своем верхнем конце датчик 9 наличия груза 4 или 5. Этот датчик 9 установлен с возможностью подключения во время загрузки или выгрузки груза к элементам управления упомянутым приводом посредством реле времени (не показано), настроенного на время, меньшее времени загрузки или выгрузки каждой единицы груза. Для включения упомянутого реле времени под нижним концом рычага 7 установлен путевой переключатель 10, пластина 11 которого прикреплена к нижнему концу рычага 7. Датчик 9 наличия груза содержит выпуклую плавающую рамку 12, предназначенную для непосредственного контакта с грузом 4 или 5 в контролируемой зоне (фиг. 8, 9). Плавающая рамка 12 опирается на боковую поверхность рычага 7 посредством плоской поперечины 13, выполненной в виде клинообразного выступа 14. Указанная поперечина 13 несет на одной плоскости выступа 14 (фиг. 8) зацеп 15 для
подпружинивания рамки 12 вдоль оси выступа 14, а на другой плоскости выступ 16, предназначенный для взаимодействия с толкателем 17 конечного выключателя 18.
Подпружинивание рамки 12 вдоль оси зуба 14 осуществляется при помощи пружины 19, один конец которой присоединен к упомянутому зацепу 15, а другой к зацепу 20, ycтaнoвлeннdмy на рычаге 7. Плавающая рамка 12 подвижно присоединена к рычагу 7 посредством накладок 21, а выступ 14 своими кромками 22 контактирует с двумя роликами 23, оси которых закреплены на рычаге 7. Для обеспечения самовозврата датчика наличия груза 9 в исходное поло5 жение служит пружина 19 и ролики 23. Выключатель 18 установлен на рычаге 7 при помощи кронштейна 24.
Основным преимуществом датчика 9 является то, что датчик срабатывает при воздействии на выпуклую часть рамки 12 как
0 под прямым, так и под острым углом к ее поверхности. Рамкой 12 обеспечивается большой ход без поломки датчика 9, предохраняемого от такой поломки корпусом рычага 7.
г Кран-штабелер, несущий грузоподъемную площадку, как правило, располагают, в проходах между стеллажами 6 (фиг. 1). Грузоподъемная площадка работает следующим образом.
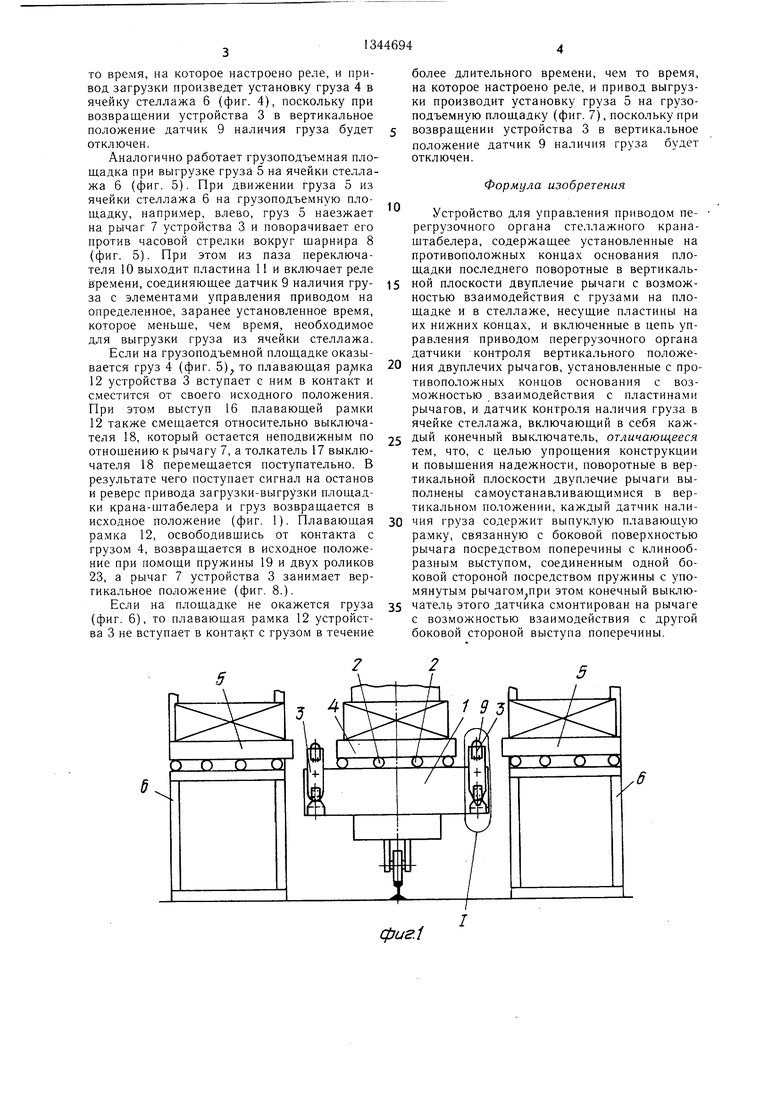
При движении груза 4 с грузоподъемQ ной площадки крана-штабелера в ячейку стеллажа 6, например, вправо (фиг. 2, 10) груз 4 наезжает на рычаг 7 устройства 3 и поворачивает его по часовой стрелке вокруг шарнира 8. При этом из паза переключателя 10 выходит пластина II и вклюг чает реле времени, соединяющее датчик 9 наличия груза с элементами управления приводом на определенное, заранее установленное время, которое меньшее, чем время, необходимое для загрузки груза.
Если в ячейке стеллажа 6 оказывается
0 груз 5 (фиг. 2), то плавающая рамка 12 устройства 3 вступает с ним в контакт и смещается от своего исходного положения (фиг. 10). При этом выступ 16 плавающей рамки 12 также смещается относительно выключателя 18, который остается неподвижным по отнощению к рычагу 7, а толкатель 17 выключателя 18 перемещается поступательно. В результате чего поступает сигнал на останов и реверс привода загрузки-выгрузки площадки крана-щтабелера, и
Q груз 4 возвращается в исходное положение (фиг. 1). Плавающая рамка 12, освобо- дивщись от контакта с грузом 5, возвращается в исходное положение при помощи пружины 19 и двух роликов 23 (фиг. 8), а рычаг 7 устройства 3 занимает вертикаль5 ное положение (фиг. 1, 8).
Если в ячейке стеллажа 6 груза не окажется (фиг. 3), то плавающая рамка 12 устройства 3 не вступает в контакт с грузом в течение более длительного времени, чем
5
то время, на которое настроено реле, и привод загрузки произведет установку груза 4 в ячейку стеллажа 6 (фиг. 4), поскольку при возвращении устройства 3 в вертикальное положение датчик 9 наличия груза будет отключен.
Аналогично работает грузоподъемная площадка при выгрузке груза 5 на ячейки стеллажа 6 (фиг. 5). При движении груза 5 из ячейки стеллажа 6 на грузоподъемную площадку, например, влево, груз 5 наезжает на рычаг 7 устройства 3 и поворачивает его против часовой стрелки вокруг шарнира 8 (фиг. 5). При этом из паза переключателя 10 выходит пластина 1 и включает реле времени, соединяющее датчик 9 наличия груза с элементами управления приводом на определенное, заранее установленное время, которое меньще, чем время, необходимое для выгрузки груза из ячейки стеллажа.
Если на грузоподъемной площадке оказывается груз 4 (фиг. 5) то плавающая 12 устройства 3 вступает с ним в контакт и сместится от своего исходного положения. При этом выступ 16 плавающей рамки 12 также смещается относительно выключателя 18, который остается неподвижным по отнощению к рычагу 7, а толкатель 17 выключателя 18 перемещается поступательно. В результате чего поступает сигнал на останов и реверс привода загрузки-выгрузки площадки крана-щтабелера и груз возвращается в исходное положение (фиг. 1). Плавающая рамка 12, освободивщись от контакта с грузом 4, возвращается в исходное положение при помощи пружины 19 и двух роликов 23, а рычаг 7 устройства 3 занимает вер- гикальное положение (фиг. 8.).
Если на площадке не окажется груза (фиг. 6), то плавающая рамка 12 устройства 3 не вступает в контакт с грузом в течение
0
5
0
5
0
5
более длительного времени, чем то время, на которое настроено реле, и привод выгрузки производит установку груза 5 на грузоподъемную площадку (фиг. 7), поскольку при возвращении устройства 3 в вертикальное положение датчик 9 наличия груза будет отключен.
Формула изобретения
Устройство для управления приводом перегрузочного органа стеллажного крана- щтабелера, содержащее установленные на противоположных концах основания площадки последнего поворотные в вертикальной плоскости двуплечие рычаги с возможностью взаимодействия с грузами на площадке и в стеллаже, несущие пластины на их нижних концах, и включенные в цепь управления приводом перегрузочного органа датчики контроля вертикального положения двуплечих рычагов, установленные с противоположных концов основания с возможностью взаимодействия с пластинами рычагов, и датчик контроля наличия груза в ячейке стеллажа, включающий в себя каждый конечный выключатель, отличающееся тем, что, с целью упрощения конструкции и повыщения надежности, поворотные в вертикальной плоскости двуплечие рычаги выполнены самоустанавливающимися в вертикальном положении, каждый датчик наличия груза содержит выпуклую плавающую рамку, связанную с боковой поверхностью рычага посредством поперечины с клинообразным выступом, соединенным одной боковой стороной посредством пружины с упомянутым рычагом при этом конечный выклю- чателЕр этого датчика смонтирован на рычаге с возможностью взаимодействия с другой боковой стороной выступа поперечины.
фuг.i
I
О
ТУ
о О
OOP (J
/
фиг2 J
я
4
X
о„
Q Ю уш
V
о о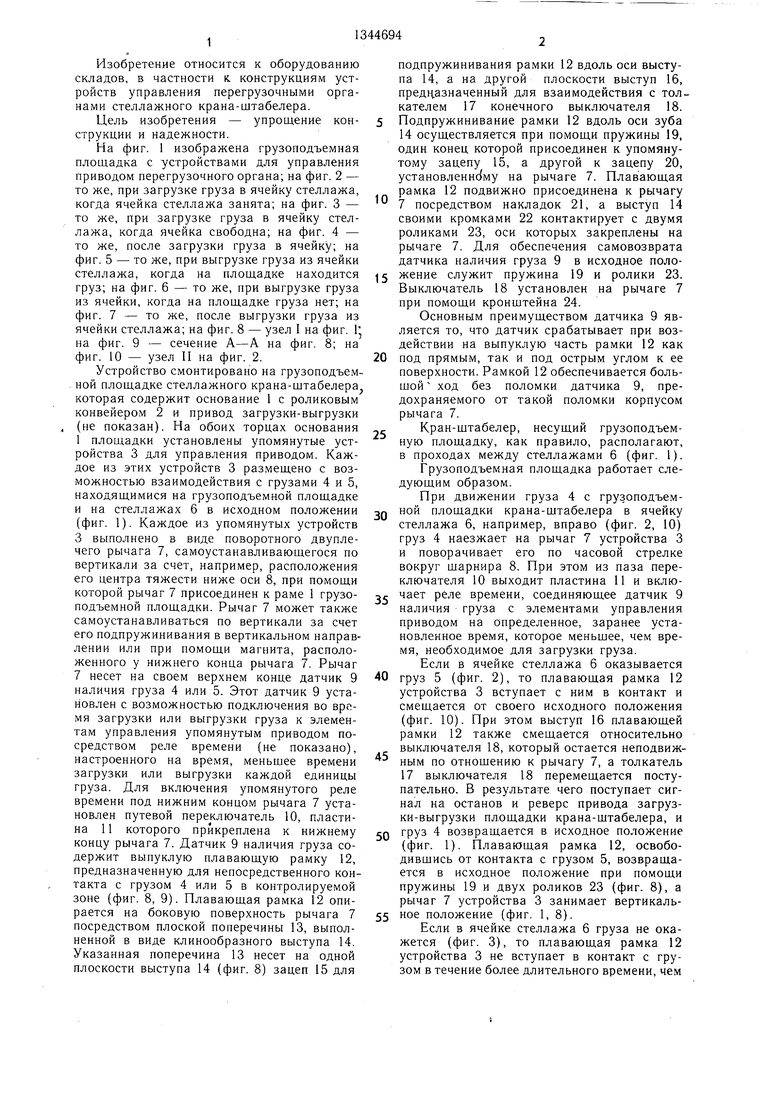
| название | год | авторы | номер документа |
|---|---|---|---|
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| Склад для хранения штучных грузов | 1977 |
|
SU735494A1 |
| Грузоподъемная площадка крана-штабелера | 1982 |
|
SU1131779A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1000353A1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО АВТОМАТИЗИРОВАННОГОСКЛАДА | 1971 |
|
SU299418A1 |
| Грузоподъемная площадка крана-штабелера | 1981 |
|
SU1014788A1 |
| Устройство для центрирования грузов | 1985 |
|
SU1310309A1 |
| Склад для хранения штучных грузов | 1985 |
|
SU1324958A1 |
| Кран-штабелер для длинномерных грузов | 1979 |
|
SU867818A1 |
| Грузоподъемная площадка крана-штабелера для поддонов с пазами под грузозахватные элементы | 1982 |
|
SU1058835A1 |
Изобретение относится к оборудованию складов, в частности к устройствам управления приводом перегрузочного органа стеллажных кранов - штабелеров. Цель изобретения - упрощение конструкции и повышение надежности. Устройство содержит поворотные Б вертикальной плоскости и прикрепленные с противоположных концов основания 1 перегрузочного органа, смонтированного на площадке крана-щта- белера, двуплечие рычаги 7, самоустанавливающиеся в вертикальном положении. На основании 1 установлены датчики контроля вертикального положения рычагов 7, на которых размещены датчики контроля наличия груза в ячейке стеллажа, содержащие каждый плавающую рамку 12, связанную поперечиной 13 с боковой поверхностью соответствующего рычага 7. На рычагах 7 смонтированы конечные выключатели 18, взаимодействующие с одной из боковых сторон выступа 14, расположенного на поперечине 13. Датчик контроля наличия груза в ячейке стеллажа срабатывает при воздействии груза на выпуклую часть рамки 12 как под прямым, так и под острым углом к ее поверхности. 10 ил. S (Л со N 4 о: Х) N
фиаЗ
cfjue:5
О
о
L
О Ю
L
Ю
ООП
б
фиг. 6
OOP
X
10
фие.Ю
Составитель А. Новиков
Техред И. ВересКорректор И. Муска
Тираж 775Подписиое
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
13035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1000353A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
