Изобретение относится к области машиностроения, а именно к копирующим манипуляторам, предназначенным для механизации погрузочно-разгрузочных работ, и может найти применение в различных отраслях техники.
Цель изобретения - повышение удобства обслуживания за счет облегчения копирования оператором отслеживаемой траектории.
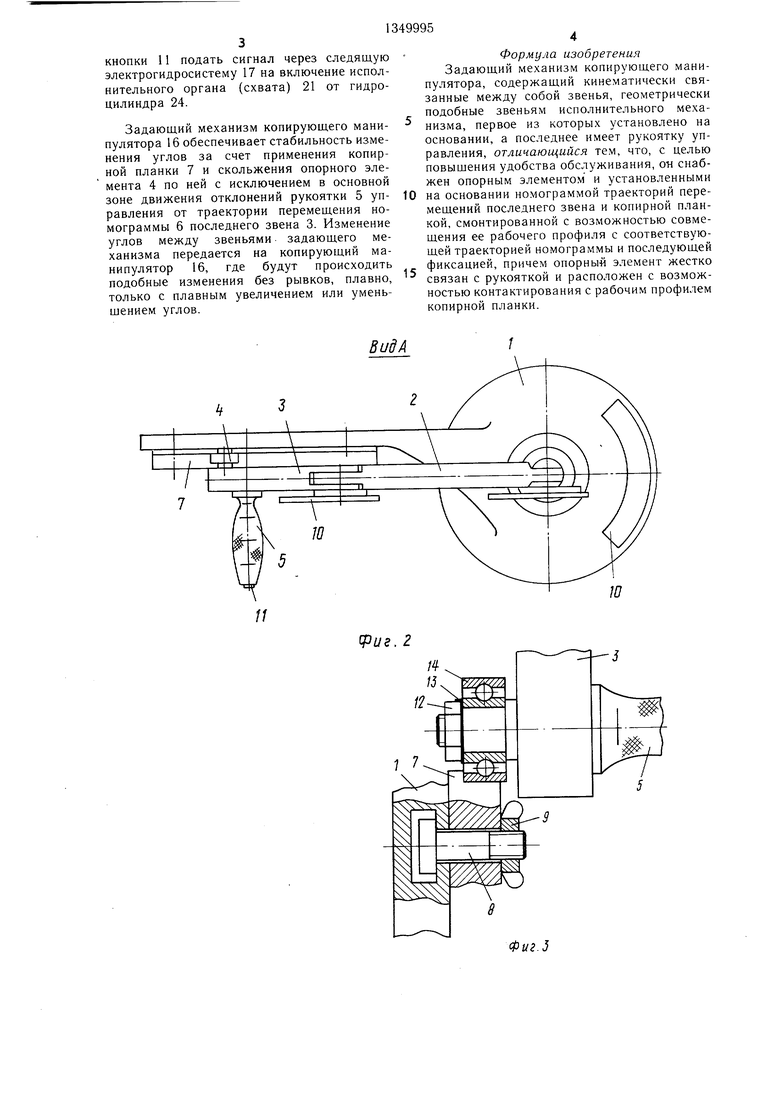
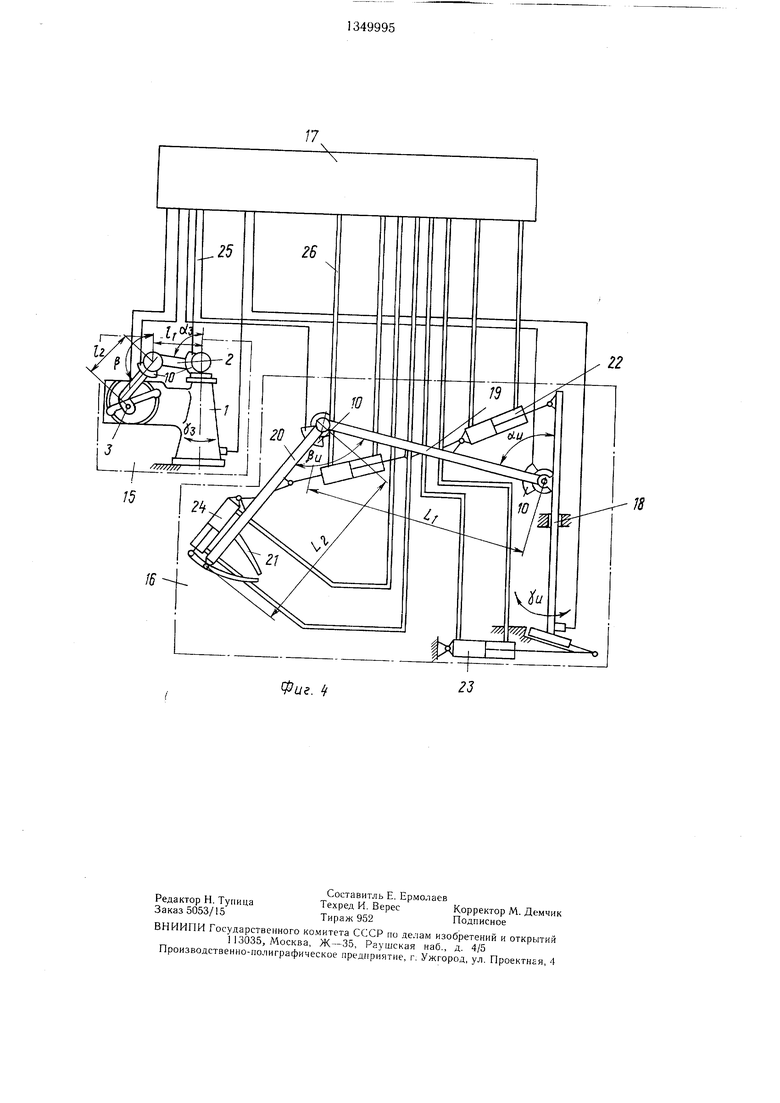
На фиг. 1 изображен задаюш,ий копи- 10 рующий манипулятор, обпдий вид; на фиг. 2- вид А на фиг. 1; на фиг. 3 - конструктивная схема исполнения опорного элемента и крепления копирной планки; на фиг. 4 - фиункциональная схема копирующего манипулятора с задаюш,им механизмом.
Задаюший механизм копируюш,его манипулятора (фиг. 1) содержит основание 1, звенья 2 и 3, опорный элемент 4, рукоятку 5 управления, номограмму 6 траекторий перемеш,ений звена 3, копирную планку 7, 2п болты 8 и гайки 9 крепления копирной планки 7, датчики 10 угловых смещений звеньев, кнопку 11 включения исполнительного органа (фиг. 2).
Пример конструктивного выполнения опорного элемента 4, рукоятки 5 управления 25 и устройства фиксации копирной планки 7 показан на фиг. 3. Копирная планка 7 крепится болтом 8, имеющим возможность смещаться в пазах основания 1 вместе с копирной планкой 7, которая фиксируется гайПри достижении равенства
, , Т.З Т4
(2)
элементы задающего механизма и копирующего манипулятора 16 занимают в пространстве геометрически подобное положение. С датчиков 10 задающего механизма и копирующего манипулятора 16 идут по электроцепям 25 одинаковые электрические сигналы. При неравенстве углов появляются на электроцепях разные сигналы. Эти сигналы рассогласования по величине пропорциональны разнице углов, т. е.
15
/7р рз-р4
-V4,
(3)
где и а,
/7р, U-i - сигналы рассогласования между цепями 25 задающего механизма и копирующего манипулятора 16. Сигналы (3) воздействуют через электроцепи 25 на следящую электрогидросистему 17. В результате меняется поток жид- кЬсти в трубопроводах 26, гидроцилиндрах 22 и 23. Изменения происходят до снижения сигнала рассогласования до нуля, т. е. выражение (3) станет равным нулю. Задающий механизм копирующего манипулятора работает следующим образо.м. Перед началом управления задающим
кой 9. Опорный элемент 4 может быть вы- 30 механизмом оператор выбирает по номополнен с опорой качения, конструктивно связанной с опорным эле.менто.м гайкой 12 и стопорной щайбой 13 и представляющей собой подщипник 14.
Функциональная схема (фиг. 4) включает
грамме 6, нанесенной на основание 1 (фиг. 1), траекторию перемещений последнего звена 3. При этом, отвернув гайки 9 и освободив болты 8, оператор совмещает рабочую (верхнюю) поверхность копирной планки 7
меха-низмом и исполнительный механизм - копирующий манипулятор 16, следящую электрогидросистему 17. Копирующий манипулятор 16 включает в себя Ефащающуюся
в себя пульт 15 управления с задаюш,им 35 с требуемой траекторией номограммы 6 и
фиксирует копи рную планку 7 болтом 8 и гайкой 9 (фиг. 3). Затем оператор рукой воздействует на руь;оятку 5 управления. При этом он добивается, чтобы опорный элемент 4 колонку 18, звенья 19 и 20, исполнитель- . своим подщипником 14 (фиг. 3) прижималный орган (схват) 21, гидроцилиндры 22--- --- --
24, датчики 10 угловых смещений звеньев, линии электроцепей 25 и трубопроводы 26 гидросистемы.
Длины звеньев манипулятора 16 и задающего механизма (фиг. 4) подобны, т. е. 45
ся и скользил по копирной планке 7.
Перемещая опорный элемент 4 по рабочей поверхности копирной планки 7, оператор обеспечивает плавные изменения углов аз и рз звеньев задающего механизма, постепенное из.мен,ение сигналов (3), вводимых в следящую электрогидросисте.му 17 (фиг. 4) и, таким образом, плавное изменение потока жидкости в трубопроводах 26 и гидроцилиндрах 22 и 23 копируюLt
Рг
:i:
Перемещая опорный элемент 4 по рабочей поверхности копирной планки 7, оператор обеспечивает плавные изменения углов аз и рз звеньев задающего механизма, постепенное из.мен,ение сигналов (3), вводимых в следящую электрогидросисте.му 17 (фиг. 4) и, таким образом, плавное изменение потока жидкости в трубопроводах 26 и гидроцилиндрах 22 и 23 копируюгде - длины звеньев 19 и 20 манипулятора 16;
/I, 2 - длины звеньев 2 и 3 задающего 50 щего манипулятора 16. При этом происходит механизма;копирование без рывков и скачкообразных
/С - масщтаб копирования.
Датчики 10 угловых смещений звеньев задающего механизма и копирующего манипулятора 16 могут быть выполнены в виде круговых потенциометров. Они фиксируют 55 углы «3, РЗ, УЗ и «4, р4, 74 смещений соответственно задающего механизма и копирующего манипулятора 16 (фиг. 4).
изменений углов «4 и р4 смещения звеньев копирующего манипулятора (фиг. 4) до обеспечения равенства (2).
После выхода из зоны копирной планки 7 оператор может при необходимости рукояткой 5 управления произвести некоторые дополнительные манипуляции, а с помощью
При достижении равенства
, , Т.З Т4
(2)
элементы задающего механизма и копирующего манипулятора 16 занимают в пространстве геометрически подобное положение. С датчиков 10 задающего механизма и копирующего манипулятора 16 идут по электроцепям 25 одинаковые электрические сигналы. При неравенстве углов появляются на электроцепях разные сигналы. Эти сигналы рассогласования по величине пропорциональны разнице углов, т. е.
/7р рз-р4
-V4,
(3)
где и а,
/7р, U-i - сигналы рассогласования между цепями 25 задающего механизма и копирующего манипулятора 16. Сигналы (3) воздействуют через электроцепи 25 на следящую электрогидросистему 17. В результате меняется поток жид- кЬсти в трубопроводах 26, гидроцилиндрах 22 и 23. Изменения происходят до снижения сигнала рассогласования до нуля, т. е. выражение (3) станет равным нулю. Задающий механизм копирующего манипулятора работает следующим образо.м. Перед началом управления задающим
механизмом оператор выбирает по номомеханизмом оператор выбирает по номограмме 6, нанесенной на основание 1 (фиг. 1), траекторию перемещений последнего звена 3. При этом, отвернув гайки 9 и освободив болты 8, оператор совмещает рабочую (верхнюю) поверхность копирной планки 7
с требуемой траекторией номограммы 6 и
-- --- --
ся и скользил по копирной планке 7.
Перемещая опорный элемент 4 по рабочей поверхности копирной планки 7, оператор обеспечивает плавные изменения углов аз и рз звеньев задающего механизма, постепенное из.мен,ение сигналов (3), вводимых в следящую электрогидросисте.му 17 (фиг. 4) и, таким образом, плавное изменение потока жидкости в трубопроводах 26 и гидроцилиндрах 22 и 23 копирующего манипулятора 16. При этом происходит копирование без рывков и скачкообразных
щего манипулятора 16. При этом происходит копирование без рывков и скачкообразных
изменений углов «4 и р4 смещения звеньев копирующего манипулятора (фиг. 4) до обеспечения равенства (2).
После выхода из зоны копирной планки 7 оператор может при необходимости рукояткой 5 управления произвести некоторые дополнительные манипуляции, а с помощью
кнопки 11 подать сигнал через следящую электрогидросистему 17 на включение исполнительного органа (схвата) 21 от гидроцилиндра 24.
Задающий механизм копирующего манипулятора 16 обеспечивает стабильность изменения углов за счет применения копир- ной планки 7 и скольжения опорного элемента 4 по ней с исключением в основной зоне движения отклонений рукоятки 5 управления от траектории перемещения номограммы 6 последнего звена 3. Изменение углов между звеньями задающего механизма передается на копирующий манипулятор 16, где будут происходить подобные изменения без рывков, плавно, только с плавным увеличением или умень- щением углов.
0
5
Формула изобретения Задающий механизм копирующего манипулятора, содержащий кинематически связанные между собой звенья, геометрически подобные звеньям исполнительного механизма, первое из которых установлено на основании, а последнее имеет рукоятку управления, отличающийся тем, что, с целью повыщения удобства обслуживания, он снабжен опорным элементом и установленными на основании номограммой траекторий перемещений последнего звена и копирной планкой, смонтированной с возможностью совмещения ее рабочего профиля с соответствующей траекторией номограммы и последующей фиксацией, причем опорный элемент жестко связан с рукояткой и расположен с возможностью контактирования с рабочим профилем копирной планки.
ВидА
Ш
иг. 2
22
Фие. if
гз
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления рабочим оборудованием экскаватора | 1978 |
|
SU885458A1 |
| Манипулятор | 1975 |
|
SU529072A1 |
| СУСТАВ ЗАДАЮЩЕГО ОРГАНА ДИСТАНЦИОННОГО КОПИРУЮЩЕГО МАНИПУЛЯТОРА | 1970 |
|
SU278371A1 |
| Устройство управления машиной манипуляторного типа | 1978 |
|
SU701792A1 |
| МАНИПУЛЯТОР | 1970 |
|
SU271252A1 |
| Манипулятор | 1982 |
|
SU1073086A1 |
| Устройство для измерения неплоскостности | 1973 |
|
SU478174A1 |
| Устройство дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1730712A1 |
| Устройство для управления звеном очувствленного манипулятора | 1974 |
|
SU517483A1 |
| МАНИПУЛЯТОР | 1971 |
|
SU313653A1 |
Изобретение относится к области машиностроения, а именно к копирующим манипуляторам, предназначенным для механизации погрузочно-разгрузочных работ, и может найти применение в различных областях техники. Цель изобретения - повышение удобства обслуживания за счет облегчения копирования оператором отслеживаемой траектории. Задающий механиз.м копирующего манипулятора содержит основание 1, звенья 2 и 3, датчики 10 угловых смещений звеньев, опорный элемент 4, который контактирует с рабочим профилем копирной планки 7 и жестко связан с рукояткой управления 5. Номограмма 6 траекторий перемещений последнего звена размещена на основании 1. Задающий механизм обеспечивает стабильность изменения углов за счет применения копирной планки 7 и скольжения опорного элемента 4 по ней с исключением в основной зоне движения отклонений рукоятки управления 5 от траектории перемещения номограммы 6 последнего звена 3. Изменение углов между звеньями задающего механизма передается на копирующий манипулятор, где будут происходить подобные изменения без рывков, плавно. 4 ил. $ (О со 4 СО со со ел 10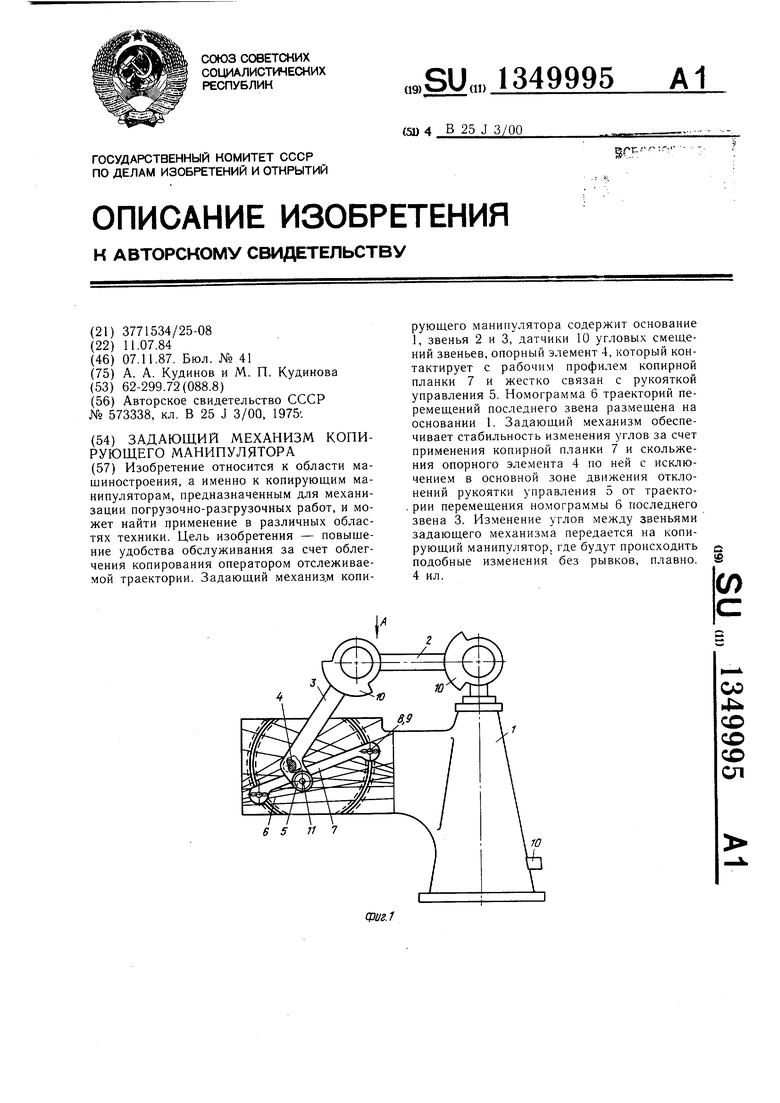
| Копирующий манипулятор | 1975 |
|
SU573338A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
