возможностей. При рабочем ходе штока 11, когда литник 23 окажется между губками 4, упоры 21 тяг 18 взаимодействуют с упорами 20, в результате чего корпус останавливается. Траверса 10 продолжает движение и нажимает на траверсу 8. Клин 7 соединенный с траверсой 8, раздвигает распорные поверхности 5 зажимных рычагов 3, которые, поворачиваясь.
Изобретение относится к машине- строению, в частности к переработке linacTMacc литьем под давлением, и может быть использовано при изготовлении манипуляторов, в частности, предназначенных для удаления и раздельного сбора литников и изделий при обслуживании литьевых форм с туннельными литниками.Целью изобретения является расширение функциональных возможностей.
На чертеже схематически показано захватное устройство в момент выноса захваченного им объекта-литника, разрез.
.Захватное устройство содержит корпус, состоящий из щек 1, между кторыми на осях 2 смонтированы зажимные рычаги 3 с губками 4, имеющими накатку на рабочей поверхности и с распорными поверхностями 5. Пружина 6 поднима-ет ра с-порные поверхности 5 к клину 7, жестко соединенному с траверсой 8, которая подпружинена пружинами 9, отжимающими ее в сторону траверсы 10, жестко соединенной Со штоком 11 силового цилиндра 12, Траверса 10 может перемещаться внутри корпуса между упорами 13 и траверсой 8. К клину 7 пружиной 14 поджимаются эксцентрики 15, оси 16 которых закреплены в щеках 1 и проходят, через эксцентрики 15 в квадрантах, наиболее удаленных от рабочего торца и продольной оси клина 7 С эксцентриками 15 жестко соединены рычаги 17, выступающие за габариты корпуса. Щеки 1 жестко соединены с тягами 18, проходящими через отверстия 19 в упорах 20, жестко з-акрепзажимают губками 4 литник. При обратном ходе штока 11 траверса 10 отходит от траверсы 8, освобождая клин 7, который остается неподвижным, так как зажат эксцентриками 15, поджимаемыми пружиной 14. Освобождение литника возможно только при воздействии на рычаги 17, связанные с эксцентриками 15. 1 ил.
ленных на корпусе силового цилиндра 12, и снабженными упорами 21, положение которых на тягах 18 может регулироваться. В щеках 1 со стороны
губок 4 имеется клиновидный вырез, кромки 22 которого расположены под углом, меньшим угла расхождения рабочих поверхностей губок 4 при их полном раскрытии перед захватом
объекта, например литника 23.
Устройство работает следующим образом. ; В исходном положении шток 11 си лового цилиндра 12 поднят, траверса
10 поджата к упорам 13, клин 7 под действием пружин 9 выведен из контакта с распорными поверхностями 5 зажимных рычагов 3, благодаря чему
I губки 4 под действием пружины 6
разведены. После завершения рабоче- iro хода штока 11, когда литник 23 Доказывается между губками 4, упоры 21 на тягах 18, перемещающихся в отверстиях 19, ложатся на упоры 20, что приводит к прекращению поступательного движения корпуса. Согласование момента остановки корпуса с достижением последним литника 23
осуществляется регулировкой положения упоров 21 на тягах 18. После остановки корпуса траверса 10 продолжает движение под действием штока 11 силового цилиндр а 12 и нажимает на траверсу 8. Клин 7, соединенный с траверсой 8, продвигаясь между зксдентриками 15, раздвигает распорные поверхности 5 зажимных рычагов 3, которые, поворачиваясь вокруг осей 2, губками 4 с накаткой зажимают литник 23. Затем шток 11 силово
го цилиндра 12 поднимается, траверса 10 отходит от траверсы 8 и, прижимаясь к упорам 13, поднимает вверх щеки 1 со всеми механизмами схвата. При этом литник 23 продолжает удер- живаться губками 4 схвата, так как благодаря смещению осей 16 эксцентрики 15, поджимаемые пружиной 1А, заклинивают клин 7, не позволяя ему выйти из распорных поверхностей 5 зажимных рычагов 3. Освобождение литника 23 возможно только при принудительном разводе эксцентриков 15 воздействием сверху на рычаги 17. При этом губки 4, расходящиеся под действием пружины 6, заходят за кромки 22 клиновидного вьфеза в щеках 1 корпуса, что обеспечивает гарантированный сброс литников 23 даже при зали- пании их на накатке губок 4.
Редактор А.Маковская
Составитель А.Алексеев Техред Л.Олийнык
Заказ 5525/13
Тираж 952 . Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4.
Формула изобретения
Захватное устройство, содержащее корпус, на котором шарнирно устаной- лены с возможностью взаимодействия с клином зажимные губки, а также привод линейного перемещения, о т- личающееся тем, что, х: целью расширения функциональных возможностей устройства, оно снабжено установленными на корпусе эксцентриками, связанными между собой пружиной, причем клин равмещен между эксцентриками и подпружинен относительно корпуса, а подвижный элемент привода размещен между клином.и дополнительно введенными упорами, закреп- ленньми накорпусе с зазором,при этом эксцентрики выполнены с рычагами,предназначенными для взаимодействия с до- полнительно введенными элементами.
Корректор Л.Патай
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1986 |
|
SU1366391A1 |
| Схват | 1983 |
|
SU1138313A1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Устройство для снятия грата при контактной стыковой сварке рельсов | 1976 |
|
SU697275A1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Схват манипулятора | 1982 |
|
SU1068281A1 |
| Схват | 1983 |
|
SU1144878A1 |
| Схват манипулятора | 1987 |
|
SU1470500A1 |
| Схват промышленного робота | 1981 |
|
SU1014701A1 |
Изобретение относится к области машиностроения и может быть использовано при изготовлении манипуляторов для удаления литых изделий из пластмасс и т.п. Целью изобретения является расширение функциональных 11 18 21 (Л со ел vl со я тз 3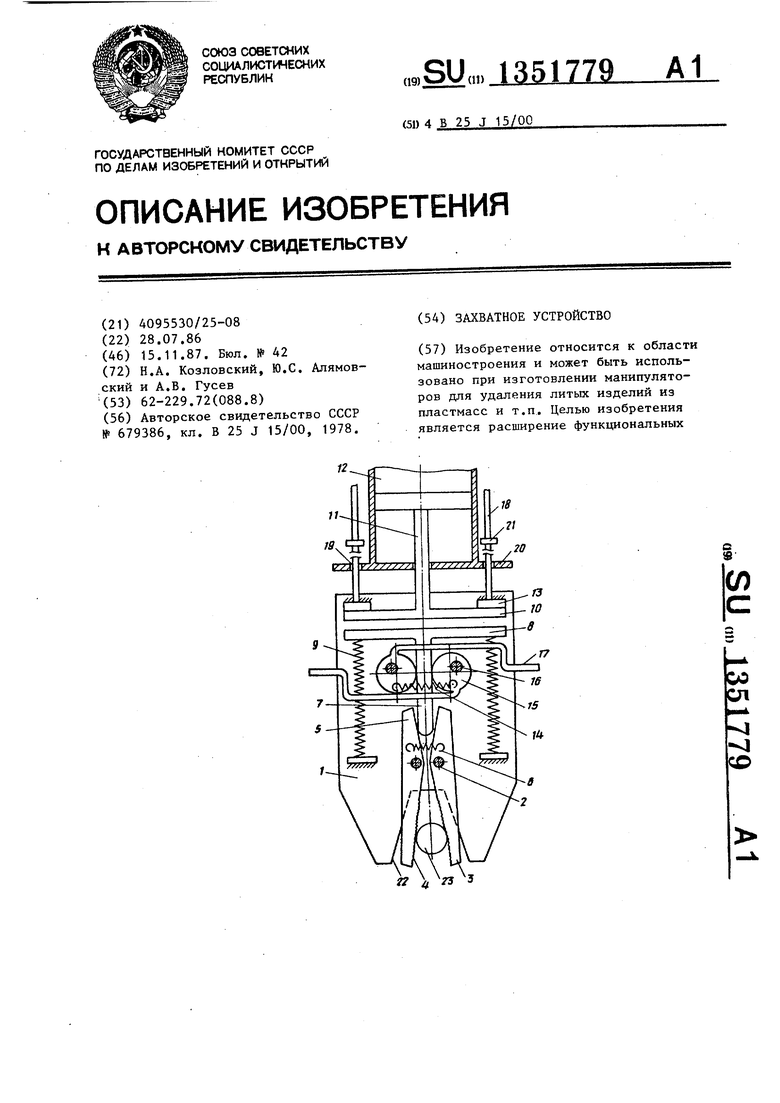
| Привод исполнительного органа промышленного робота | 1978 |
|
SU679386A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
