Изобретение относится к машиностроению, в частности к производству машин для контактной точечной сварки, и может быть использовано при изготовлении арматурных каркасов в строительной индустрии.
Целью изобретения является упрощение конструкции, расширение технологических возможностей, повьшение надежности и производительности.
На фиг.1 показана предложенная машина, вид сверху; на фиг.2 то же, вид сбоку; на фиг.З - гибочное устройство; на фиг.4 - пластина гибочного устройства; на фиг.5 - гибочное устройство, вид сбоку.
Машина для контактной точечной сварки арматурных каркасов содержит ст анину 1, правильное устройство 2, механизм 3 для подачи стержней 4-6 с кареткой 7 и цанговыми .захватами 8, устройство 9 для сварки с электродами 10-13, сварочными трансформд. ми 14, 15 и фиксаторными вилками 16, приемньй стол 17 и прижимной вал 18. Между механизмом 3 подачи и устройством 9 для сварки смонтировано гибочное устройство 19;, имеющее корпус, состоящий из параллельно расположенных с зазорами под заданные диаметры стержней и скрепленных между собой двух и более пластин 20. В пла ,тинах 20 имеются соответствующей кон |фигурации пазы 21-23 для перемещения в них гибочногб 24, огибаемого 25 и зажимного 26 ролико,в.
Гибочный ролик 24 закреплен на отдельном двузвенном шарнирном рычаге 27, который с возможностью поворота вокруг стержня 28 установлен на го- рийонтальной плоскости с пазом 29 кронштейна 30, являющегося продолжением гибочного рычага 31.
Огибаемьй ролик 25 вмонтирован в приводной ползун 32, установленный на направляющих 33 с возможностью перемещения от цилиндра 34 вдоль паза 22.
I
Зажимной ролик 26 установлен на одном из плечей двуплечего подпружиненного рычага 35, ось 36 поворота которого закреплена на верхней Ълас- тине 20 корпуса в конце паза 22 огибаемого ролика 253 второе плечо ры- .ча.га 35 повернуто к огибаемому ролику 25 и взаимодействует с ним.
К корпусу гибочного устройства 19 прикреплены направляющие 37, по кото
рым перемещается стойка 38 с упорными роликами 39. Стойка 38 соединена шар- нирно с гибочным рычагом 31 тягой 40, „ Гибочный рычаг 31 выполнен двуплечим, плечи рычага образуют угол, соответствующий углу предварительно изогнутого стержня, с вершиной в шарнире 41 поворота. Ось поворота шарни- 0 ра 41 расположена на П-образном кронштейне 42, который закреплен на верхней пластине 20 корпуса.
Концы плечей гибочного рычага 31 шарнирно соединены со стоками 43 ци- 5 линдров 44, оси которых являются схо дяящмися.
Машина работает следующим образом;
Предварительно арматура из бухт в виде трех непрерывных стержней 4, 5, 6 подается в правильное устройство 2 и распределяется по трем рядам правильных роликов,, затем протаскивается через цанговые захваты 8 механизма 3,подачи. Далее средний стержень 5, пройдя упорные ролики 39, поступает в один иа соответствую1г1их диаметру стержня зазоров корпуса гибочного устройства 19, где протаскивается через зону действия роликов: 30 гибочного 24, огибаемого 25 и заг сим0
25
ого 26.
Два остальных крайних стержня 4, 6р пройдя под корпусом гиб(5чного устройства 19 по направляющим втулкам, поступают на нижние электроды 10-13 машины
После окончания заправки машины арматурой по команде оператора ера-. батывает по определенной программе
цилиндр 34 огибаемого ролика, и огибаемый ролик 25 по пазу 22 перемещается в рабочее положение, где вместе с взаимодействующим с тлкм зажимным: роликом 26 подгибает и фиксирует вьтуск изгибаемого стержня 5,
Включаются цилиндры 44 гибочнсго ролика 24 и происходит по дуге паза его движение и вместе с ним перемещение упорйых роликов 39, закрепленных на стойке 38, связанной с гибочным рычагом 31 при помош;И тяги 40, в процессе чего осуществляется формирование зигзагообразного стержня 5, имеющего поперечные и наклонные
участки относительно крайних стержней 4, 6.
Во время движения гибочного 24 и упорных 39 роликов происходит путем вытяжки из бухты дополнительная подача стержня 5, затем при помощи приводов огибаемый 25, зажимной 26, гибочньш 24 и упорные 39 ролики возвращаются в исходное положение.
Во избежание деформации наклонно- го участка стержня 5 и его изогнутого колена гибочный ролик 24 возвращается в исходное положение не по прежней траектории, а, встретив упругое сопротивление наклонного ууаст ка стержня, переходит на другую более прямую траекторию движения в пре делах пазов 21, 29 корпуса гибочного устройства 19 и кронштейна 30 гибочного рычага 31.
Конфигурация конечных участков и расположение пазов 21. и 29 в корпусе гибочного устройства и в кронштейне 30 на гибочном рычаге поз
,воляет гибочному ролику 24 снова за- 20 жимного роликов, установленных парал- нять исходное положение с заданным радиусом для гибки.
Приводнйя каретка механизма 3 подачи с некоторой задержкой или за- медлением движения по сравнению с возвращением роликов в исходное положение перемещает стержни 4, 5, 6 при помощи цанговых захватов 8 строго на заданный шаг, а с учетом распололельно друг другу с зазорами, двуплечего гибочного рычага, шарнирно закрепленного на наружной пластине дву- звенного шарнирного рычага, подпружи- 25оненного поворотного двуплечего рычага, привод рычажно-шарнирной системы содержит три автономных цилиндра, гибочный ролик размещен в пазах пластины и кронштейна и закреплен на одном
жения гибочного устройства относитель-ЗО звене двузвенного шарнирного рычага.
но электродов сварочного устройства на величину, кратную шагу подачи, поперечный участок изогнутого стержня 5 устанавливается точно под электродами
сварочного устройства. Точки пересе- 5 плечо гибочного рычага шарнирно соедичения указанных стержней попадают на электроды 10-13 и фиксируются прижимным валом 18 и вилочными штырями при опускании верхних электродов.
Сварочный ток подводится к электродам по односторонней шунтовой схеме от вторичных обмоток сварочных трансформаторов 14, 15. Опусканием верхних электродов машины производится сварка каркаса и поочередно всех пересечений Сваренный каркас далее перемещается на приемный стол 17, где разрезается на отрезки заданной длины.
Использование изобретения обеспечивает упрощение конструкции машины, расширение ее технологических возможно тей, повьш1ение надежности и произ-55 бочного .рычага, сходятся в одной
водительности.
fO5407 4
Формула изобретения 1. Машина для контактной точечной сварки арматурных каркасов, преимущественно с Z-образными элементами, содержащая станину, правильное устройство, механизм подачи стержней, гибочное устройство с приводной рычаж- но-шарнирной системой, гибочным роликом и устройством для сварки, о т - лич ающа я с я тем, что, с це
лью упрощения конструкции, расширения технологических возможностей, повьш1е- ния надежности и производительности, гибочное устройство выполнено в виде огибаемого и зажимного роликов, стойки с упорными роликами, кронштейна с фигурным пазом и стержнем, корпуса из пластин с фигурными пазами для перемещения гибочного огибаемого и зажимного роликов, установленных парал-
лельно друг другу с зазорами, двуплечего гибочного рычага, шарнирно закрепленного на наружной пластине дву- звенного шарнирного рычага, подпружи- ненного поворотного двуплечего рычага, привод рычажно-шарнирной системы содержит три автономных цилиндра, гибочный ролик размещен в пазах пластины и кронштейна и закреплен на одном
другое звено которого шарнирно смонтировано на стержне кронштейна, стойка с упорными роликами шарнирно закреплена на стержне кронштейна, одно
нено с первым цилиндром привода ры-- чажно-шарнирной системы, другое плечо смонтировано на стержне кронштейна и шарнирно связано с вторым цилиндром, огибаемый ролик шарнирно соединен с третьим цилиндром с возможностью перемещения по пазу пластины, зажимной ролик размещен в пазу пластины и закреплен на одном плече
подпружиненного поворотного двуплечего рычага, установленного на оси, смонтированной на наружной пластине, с возможностью взаимодействия другим плечом с огибаемым роликом.
2. Машина поп.1, отличающаяся тем, что, с целью повышения экономичности привода и надежности гибочного ролика, оси цилиндров j связанных с двумя плечами гиточке.
П
cd
-Ч
J7
2
QJUZ.3
VvV
ФигЛ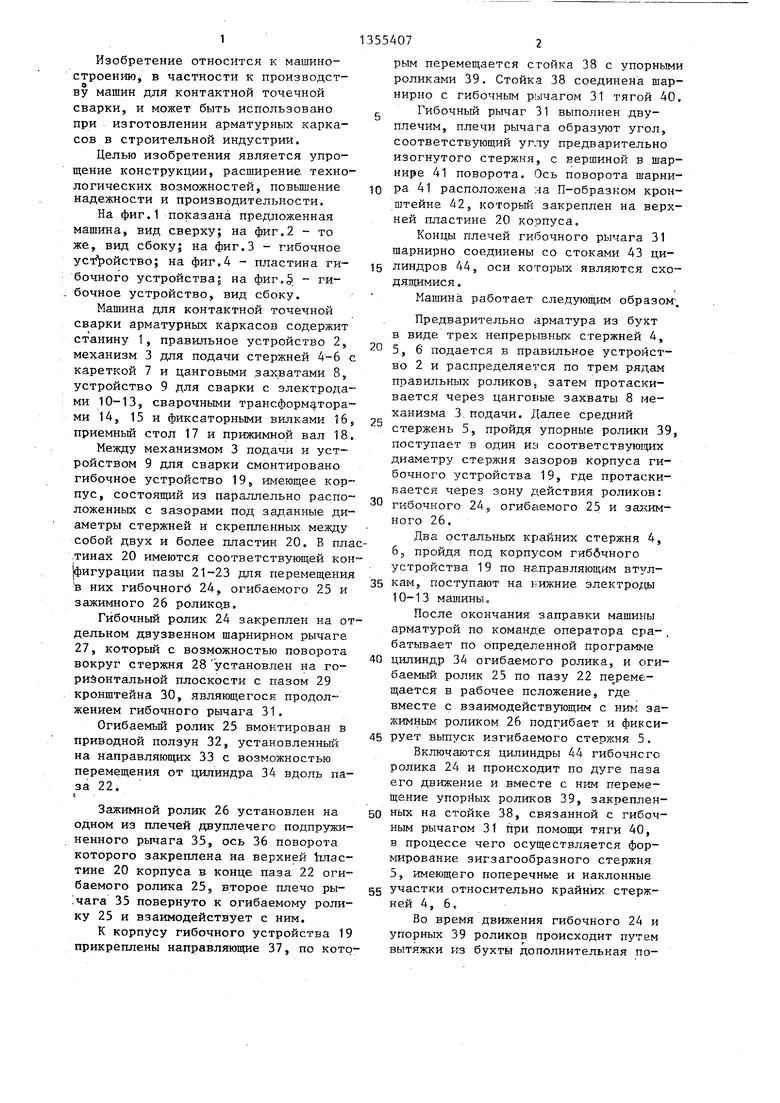
| название | год | авторы | номер документа |
|---|---|---|---|
| Линия для изготовления арматурных каркасов | 1985 |
|
SU1297977A1 |
| УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ АРМАТУРНЫХКАРКАСОВ | 1972 |
|
SU435888A1 |
| Машина для контактной сварки арматурных каркасов | 1987 |
|
SU1590275A1 |
| Устройство для изготовления пространственных арматурных каркасов | 1986 |
|
SU1409435A1 |
| Клещевая подача для универсально-гибочных автоматов с приводом от центральной шестерни | 1987 |
|
SU1547916A1 |
| Машина для контактной точечной сварки арматурных сеток | 1986 |
|
SU1348117A1 |
| Линия для изготовления пространст-ВЕННыХ АРМАТуРНыХ KAPKACOB | 1977 |
|
SU804134A1 |
| Способ изготовления арматурных каркасов и линия для его осуществления | 1985 |
|
SU1399040A1 |
| Автоматическая линия для изготовления арматурных каркасов | 1984 |
|
SU1337176A1 |
| Устройство для многоколенной гибки труб | 1990 |
|
SU1734907A1 |


Изобретение относится к машиностроению, в частности к производству машин для контактной точечной сварки, и может найти применение при изготовлении арматурных каркасов в строительной индустрии. Целью изобретения является упрощение конструкции, расширение технологических возмож. ностей, повьш1ение надежности и произ- .водительности. Стержень 5, подвергаемый деформированию, пропускают через упорные ролики 39, гибочный 24, огибаемьй 25 и зажимной 26 ролики. Цилиндр перемещает огибаемый ролик 25 по пазу 22 и совместно с зажимным роликом 26 подгибает и фиксирует выпуск стержня 5. Приводом перемещают гибочный ролик 24 и упорные ролики 39. В результате этого осуществляется формирование зигзагообразной формы стержня 5. Ролик 24 возвращается в исходное положение по пазам 21 и 29 гибочного устройства и кронштейна 30 гибочного рычага 31. Гибочное устройство машины позволяет частично совместить операции отвода роликов гибки в исходное положение и подачи всех стержней на шаг. Благодаря схождению осей цилиндров, связанных с двумя плечами гибочного рычага, в одной точке снижаются усилия, раз:виваемые цилиндрами. 1 з.п. ф-лы, 5 ил. (Л со ел Сл 4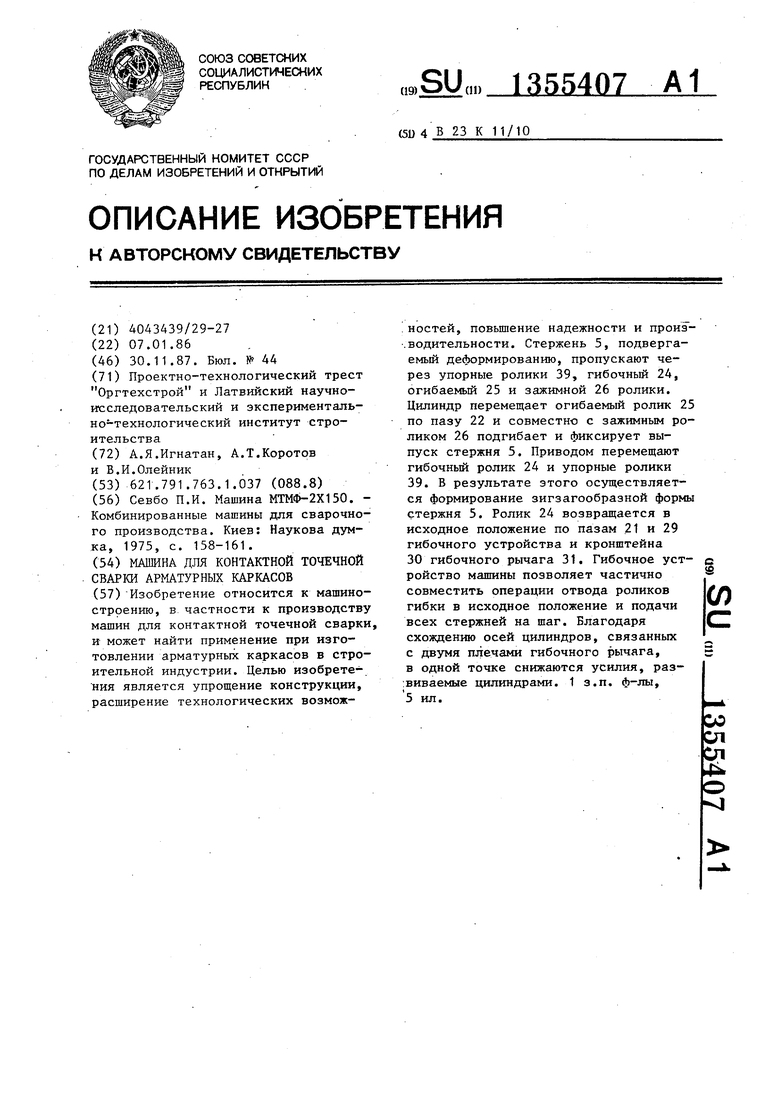
Г т
33
я J/ 1 ;
/ / /
(fftfsS
Редактор М.Келемеш
Составитель Э.Ветрова Техред Л. Олийньпс
Заказ 5745/14Тираж 970Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий - 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор И. Эрдейи
| Севбо П.И | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| - Комбинированные машины для сварочного производства | |||
| Киев: Наукова думка, 1975, с | |||
| Система механической тяги | 1919 |
|
SU158A1 |
