Изобретение относится к автоматизации машиностроеиия и может быть использовано для загрузки металлорежущего оборудования с применением иромышленных роботов.
Целью изобретения является иовышенне производительности за счет обеснечения выдачи детали при холостом ходе подъемного механизма.
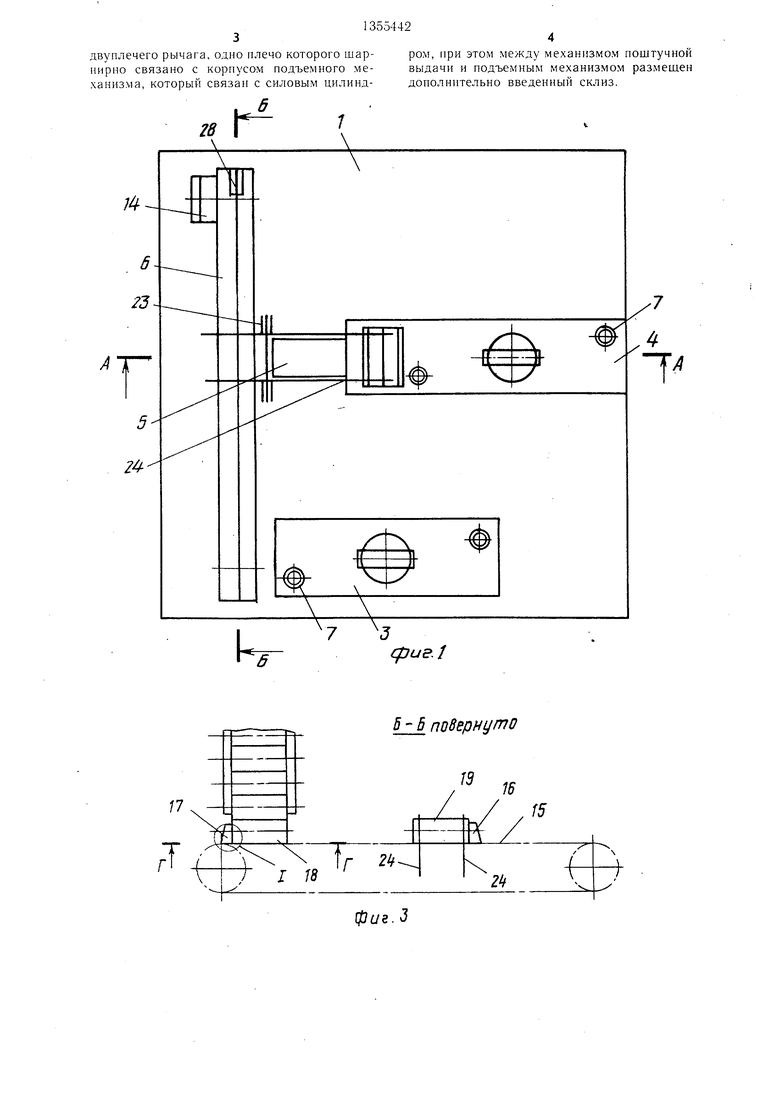
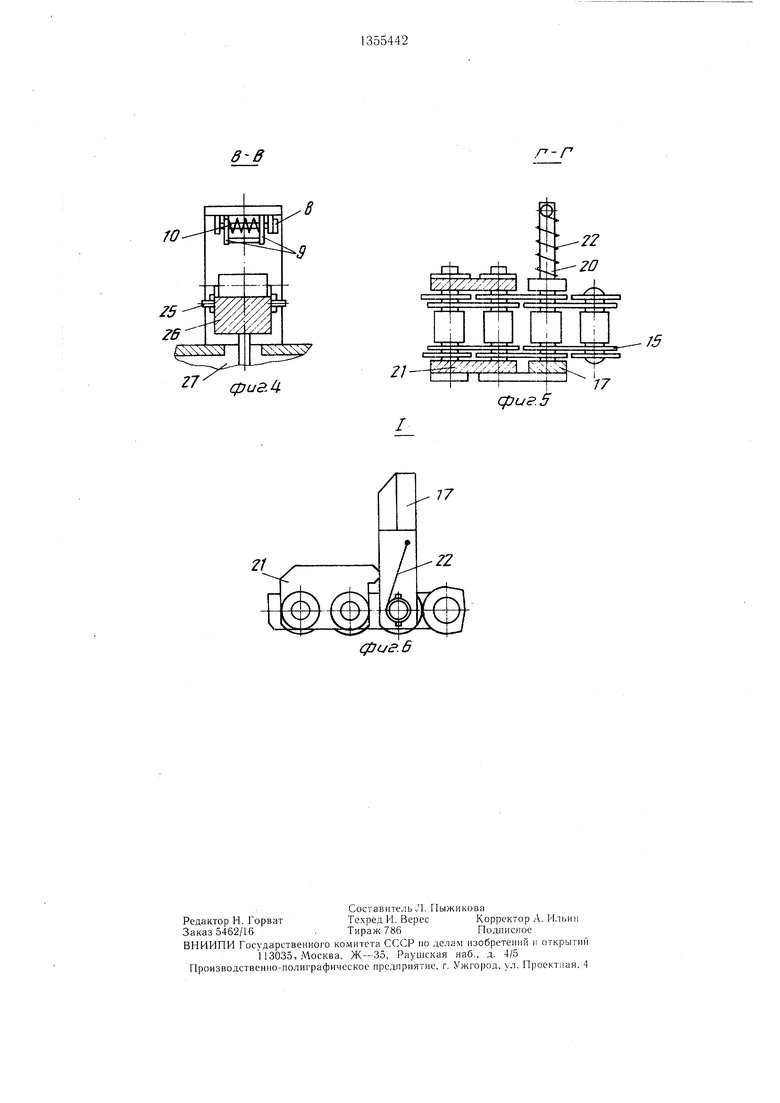
На фиг. 1 показано устройство, вид в плане; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. I; на фиг. 4 - разрез В-В на фиг. 2; на фиг. 5 - разрез Г-Г на фиг. 3; на фиг. 6 - узел I на фиг. 3
Загрузочное устройство содержит осно- вапи е 1 с закрепленными на нем кронпггей- ном 2 выдающего контейнера 3, кронштей- пом ириемпого контейнера 4, наклоины.м скатом 5 и направляющей 6. На верхней плоскости кронщтейиов 2 установлены пальцы 7 для точного базирования контейнеров. На кронштейне приемного контейнера 4 на осях 8 размещены отсекатели 9, ноднружи- ненные пружиной 10 на упор 11.
В направляющей 6 па осях 12 сидят звездочки 13, одна из которых нолучает вращение от привода 14. Эти звездочки взаимодействуют с приемным механизмом, выпо.1- иенным в виде бесконечной цени 15, на которой размен1ены ведуп 1не зубья 16 и 17, причем расстояние .между зубьями соответствует расстоянию между крайними торцами деталей, одна из которых находится на позпции выгрузки (заготовка 18), а другая - па позпции загрузки (обработаппая па техиоло- гическом оборудовании деталь 19). Зуб 17 сидит на оеи 20 и взаимодействует с упо- ро.м 21 через пружину 22. В пазах направляющей 5 размещен механизм нон1туч1юй выдачи, выполненный в виде установленных па оси 23 нары двуплечих рычагов 24, размеп.1ен пых но обе стороны от ската 4, первые п;1ечи которых через оси 25 связаны с механизмом подъема, выполненным в виде шибера 26. Шибер 26 закреплен па штоке пневмоци- линдра 27, который установлен на основании I. На нанрав.ляющей 5 со стороны, про- тивоположпой кропштейпу 2, размепхен страховочный упор 28.
В ко1ггейнерах 7 размещены заслонки 29. На кронштейне 2 установлен механизм зажима 30 контейнера 7.
В исходном положении на кронпггейнс 2 установлен контейнер с заготовками 18, а на дру1 ом -- пустой контейнер, при этст его закреиляют меха1шзмом зажима 30. Из контейнеров 7 выдвигают заслонки 29. По си налам конечников {все имеющиеся конечпнки не ноказаны) «Заелонки BI LTBH- нуты - загружаемая тара закренлепа пггок пневмопилиндра 27 выдвигается и шибер 26 зани.мает крайнее верхнее ноложение.
Ведущие зубья 16 и 17 расноложепы, как изображено на фиг. 3, нри этом заготов
5
0
5
0
5
0
5
0
5
ка 18 находится на иризме направляюнаей 5, а обработанная деталь 19 на приз.ме направляющей 5 отсутствует.
Устройство работаег следующим образом.
Нри врагценни звездочки 13 от н)ивода 14 зуб 17 неременлает заготовку IS до страховочного упора 28, нри этом срабатывает конечный выключатель, размещен1Нз1Й в не.м, и зуб 17 останавливается. Заготовка выдана в зону захвата. Схват промышленного робота (не показан) берет заготовку 18 и юдает ее в зону обработки. После обработки njjOMbinj- лениый робот забирает дета-ль из технологического оборудования и в(хзвращает ее па- зад, т. е. па направляющую 5 в ЗОНУ между упором 28 и ведущим зубом 17, привод 14 реверсирует. При этом обработанную деталь 19 подхватывает ведущий зуб 16, и транспортирует ее в зону де1 |ствия гов 24. При этом ведущий зуб 17 под л.ей- ствием вееа деталей 18 отклоняется, а выйдя за габарит деталей 18, занимает исходное иоложение нод де к твием нруЖ1 11ы 22 нри взаимодействии с упором 21. По сигналу конечных 15ыключателей о том, что ведущие зубья 16 и 17 заняли 1-1Сходное положение, срабатывает нпевмоц :;п 1ндр 27. При этом шток его зани.мает крайнее нижнее но- . ложение. Вместе со ИГРОКОМ неремещается 1нибер 26, опуская вниз нравыс плечи рыча- г ов 24, а левые, воздействуя па дета.;1Ь 19, сталкивают ее на скат 4. Скатываясь, деталь 19 нонадает на призму 1ппбера 26. По сигналу конечного выключателя шток ннев.моцилиндра 27 идет вверх, а вместе с ним и шибер 26 с деталью 19. Под действием детали 19 отсекателн 9 расходятся, п.ро- ворачиваясь на осях 8, а после того, как дета,.чь перестанет на ннх воздействовать, отсекут ее нод дейетвнем пружин 10, не давая упасть при очередно.м ходе 1 ибера 26 вниз. Таким образом, за1 отовка из ко1ггей- iiepa, установленного на кронштейне 2, после обработкн на технологическом оборудовании попадает в коптейнер, раз.меп1енпый на кронштеЙ1 е 2. В дальпейн)ем цикл повторяется до тех иор, пока не опорожнится контейнер на KpOHrirreiin.e 2. Затем запо.лненный обработанньп деталями контейнер на крон- П1тейпе 3 переме1паю г на апалошчное устройство другого робсгготех Клл отчее кого комн.лекса.
Формула изобретения
Загрузочное устройство, содержащее основание, 1 1одаюп1ПЙ механизм. меха1шзм но- пггучной выдачи, нодъе.мпый мехапиз.м н силовой цилиндр, от ли чаю шее с.ч тем, что, е целью повышепия производительпости, ме- ха1гизм поштучной выдачи выиолпеп в виде 1иар1П1рно уета11овле1шого па основании
двуплечего рычага, одно плечо которого шар- нирно связано с корпусом подъемного механизма, который связан с силовым цилинд28
К
/
ром, при этом между механизмом поштучной выдачи и подъемным механизмом размешен дополнительно введенный склиз.
74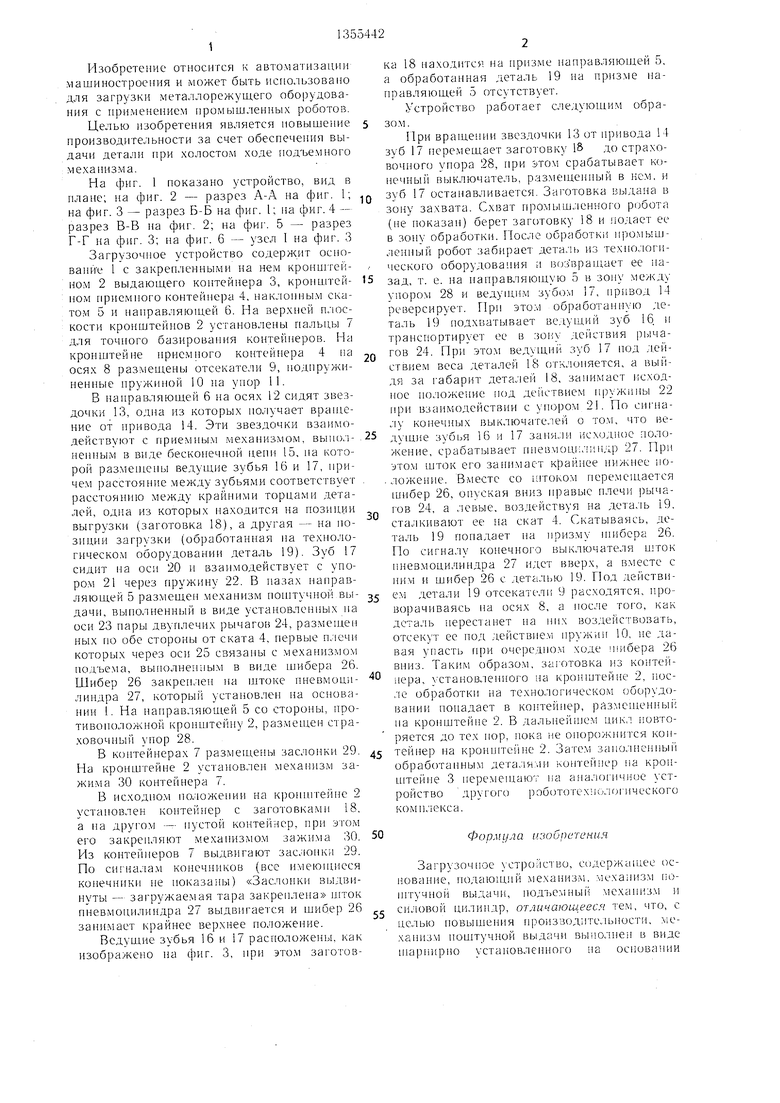
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство | 1990 |
|
SU1774910A3 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1532149A1 |
| Линия для изготовления клееных деревянных балок | 1984 |
|
SU1172712A1 |
| Устройство для загрузки длинномерных заготовок | 1990 |
|
SU1803305A1 |
| Автоматическая линия для изготовле-Ния издЕлия пЕРЕМЕННОгО СЕчЕНия | 1979 |
|
SU814533A1 |
| Загрузочное устройство | 1991 |
|
SU1814607A3 |
| Автоматическая линия | 1985 |
|
SU1296373A1 |
| Производственный модуль для штамповочных работ | 1988 |
|
SU1685576A1 |
| Двухсторонний разгружатель для передачи деталей | 1964 |
|
SU212018A1 |
| Автоматизированный комплекс для штамповки | 1987 |
|
SU1540907A1 |
Изобретение относится к автоматизации маи иностроения и может быть использовано для загрузки мeтav лope кylцero оборудования е применением промьинленны.ч роботов. Целью изобретения является повышение нроизводительности, что достигается за счет установки между механизмом но- штучной выдачи, выполненным в виде шар- нирно установленного на основании 1 дву- илечего рычага 24, одно плечо которого связано с подъемным механизмом, представляющим собой шибер 26. и последним склиза. С приемного механизма деталь ноштучно подается на склиз, при этом шибер 26 совершает пере.мешение вверх, при опускании последнего осупдествляется удерживание деталей на приемном механизме. 6 ил. (Л со О СП 4 4:; ьо фиг. 2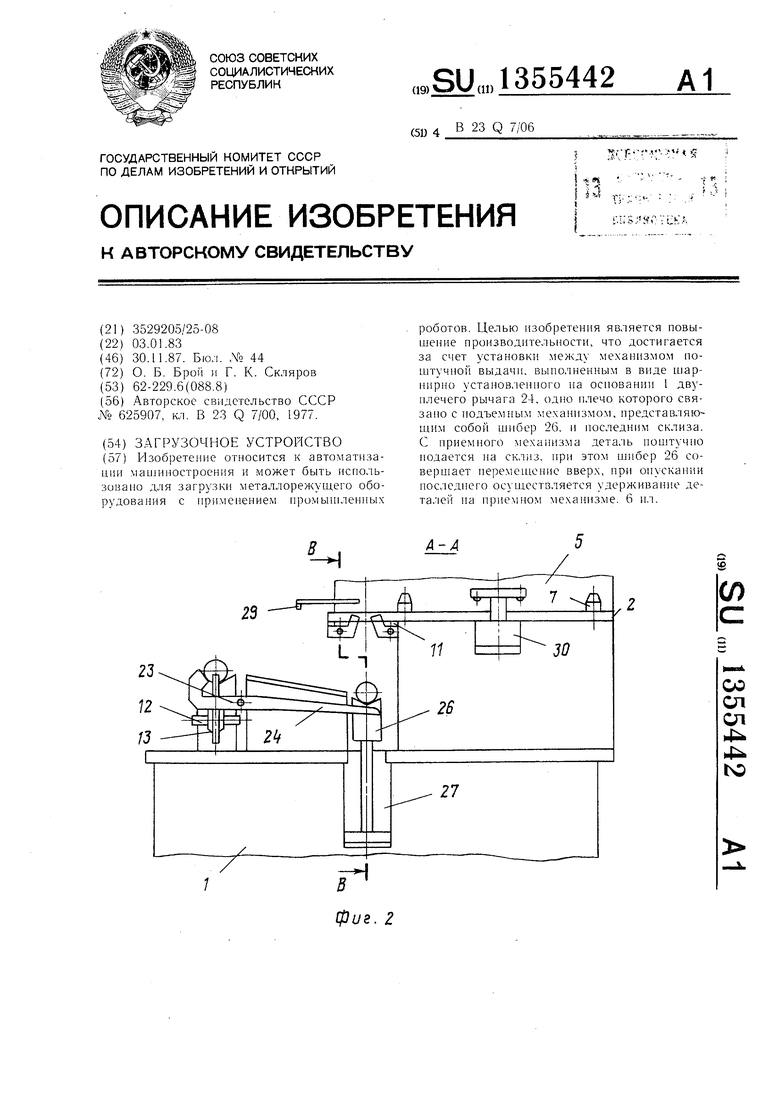
Л
7
Y
срие.1
I W
Тг 2lt5-6 повернуто
13
16
f5
2k
фиг. 3
г-г
фиЭЛ
фиг. 5
17
фие.б
| Подающее устройство к трубогибочному станку | 1977 |
|
SU625907A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
